基于無速度傳感器的PMSM改進直接轉矩控制方法
2018-01-18 09:02:57
制造業自動化 2017年9期
(天津理工大學 天津市復雜系統控制理論及應用重點實驗室,天津 300384)
0 引言
永磁同步電機具有體積小,功率密度高等特點,被廣泛應用于數控機床、航空航天等領域[1]。永磁同步電機的直接轉矩控制(Direct Torque Control,DTC)具有控制簡單,系統動態響應快等優點,得到了越來越多的應用;但傳統的直接轉矩控制由于采用了開關表和滯環控制,導致了磁鏈和轉矩波動大,逆變器開關頻率不恒定等缺點[2]。常用的解決方法有占空比控制[3]、空間矢量調制(Space Vector Pulse Width Modulation,SVM)技術[4,5]等。
高精度、高分辨率的速度傳感器價格昂貴,不僅提高了伺服系統的成本,還限制了伺服驅動裝置在惡劣條件下的應用[6]。運用無速度傳感器控制技術,可以在線估計電機的速度,省去機械傳感器。常用的方法有:模型參考自適應法[4,7]、擴展卡爾曼濾波器法[6,8]、滑模觀測器法[9,10]等。
本文采用改進的滑模觀測器估算速度,并將空間矢量調制技術引入永磁同步電機直接轉矩控制系統,提出基于無速度傳感器的SVM-DTC系統,有效減小了磁鏈和轉矩波動,并實現良好的轉速觀測效果,得到更好的穩態性能。
1 永磁同步電機數學模型
忽略鐵芯飽和等因素影響,表貼式永磁同步電機在α?β軸系下的數學模型如下:
其中反電動勢為:
2 改進的滑模觀測器
由于三相定子電流容易測得,可在α?β軸系的定子電流軌跡下選取切換面s(x)=0[10]。
2.1 飽和函數減小抖動
為了減小抖動,用飽和函數sat(x)取代傳統滑模觀測器[9]的不連續開關函數。飽和函數可表示為:
式中△表示一個小的正實常數。
2.2 反電動勢觀測器設計
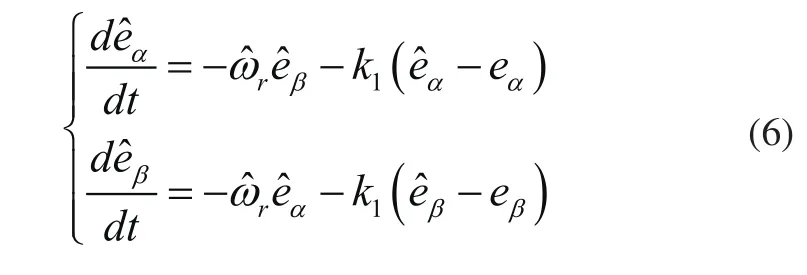
這里設計一個反電動勢觀測器解決傳統低通濾波器的相位滯后問題[9]。在實際的電機系統中,其機械時間常數要比電氣時間常數大得多,因此在一個控制周期內假定dωr/dt=0,則反電動勢模型可表示為:
構造如下反電動勢觀測器:
將式(6)減去式(5)并進一步整理,得到:
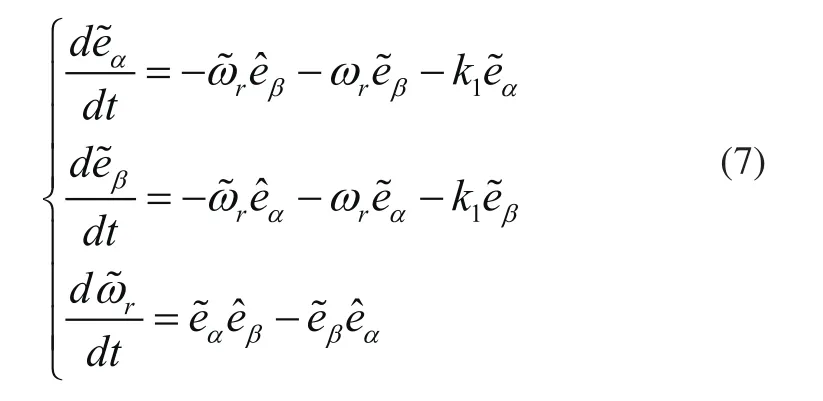
構造Lyapunov函數來證明式(6)的穩定性:

對式(8)進行求導,并將式(7)代入得:

由上可知所設計的觀測器是穩定的。
2.3 反電動勢反饋系數的引入和分析
將經過反電動勢觀測器獲得的信號引入滑模電流觀測器中,改進的滑模觀測器可表示為:
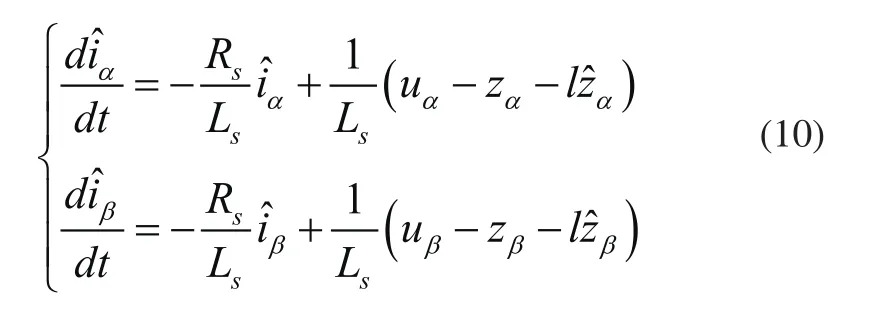
將式(10)與式(1)相減得到電流誤差方程:
當系統運行在滑模面上時s(x)=0,有:
定義反電動勢反饋系數為:

式中,ωref,ωrat分別為給定速度參考值,額定轉速,m為常數。
當ωref較小時,反電動勢相對較小,傳統的滑模觀測器估算誤差較大。由式(13)可知,取合適的m值,使?1<l<0,因為幅值相等,此時由式(12)可得大于反電動勢eα,eβ的幅值,所以從中提取的位置、轉速信息更準確。當ωref增大時,l增大,由式(11)知加快了s(x)收斂到0的速度,保證了滑模觀測器在轉速較大時的穩定性和快速收斂性。
2.4 鎖相環(PLL)進行轉速估計
2.2 節設計的反電動勢觀測器可有效濾除高頻擾動,這里采用PLL獲得電機速度,可解決傳統滑模觀測器由角度進行微分計算速度所產生的擾動問題。
由式(2)可得:

由觀測的反電動勢和PLL估算的速度積分后所得的角度來跟蹤實際位置角度。定義位置誤差信號為:

改進的滑模觀測器如圖1所示。
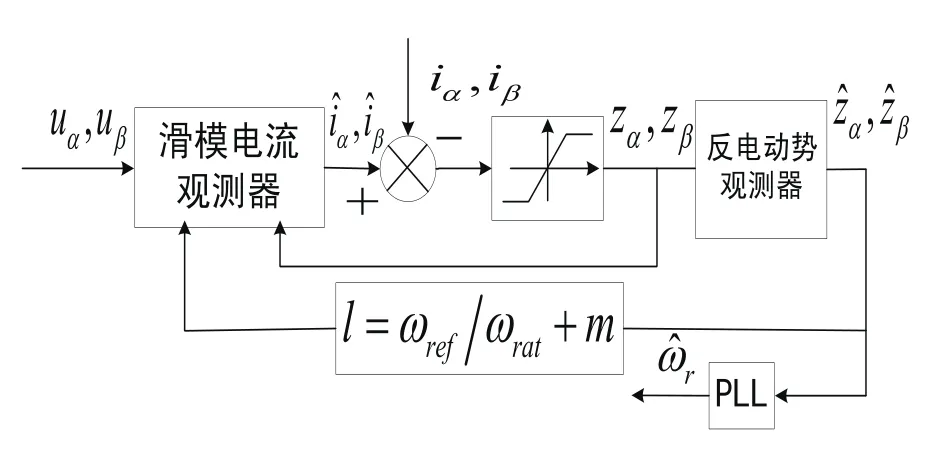
圖1 改進滑模觀測器原理框圖
3 預期電壓矢量計算與空間矢量調制
由圖2可將式(16)近似表示為:
由此可計算出預期電壓矢量的幅值和相位,確定與其相鄰的兩個非零電壓矢量,進行空間矢量調制。
可以看出,與傳統DTC相比,提出的SVM-DTC控制方式可以使逆變器開關頻率恒定,且能根據轉矩和磁鏈的實時誤差來生成合適的電壓矢量,因而能較好地解決轉矩和磁鏈波動。
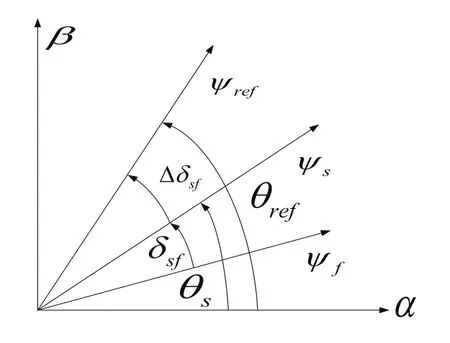
圖2 定子磁鏈矢量軌跡
4 實驗驗證
基于無速度傳感器的永磁同步電機SVM-DTC控制系統原理框圖如圖3所示。本文采用“三段式”方法來啟動電機。
本文采用dSPACE半實物仿真平臺對提出的控制方法進行實驗。實驗所用電機參數為:額定電壓380V,額定轉速1500r/min,定子電感50mH,定子電阻2.8Ω,永磁體磁鏈0.876Wb,極對數2。
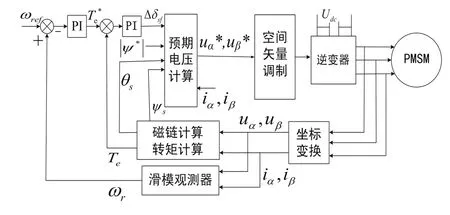
圖3 基于無速度傳感器的SVM-DTC控制系統框圖
4.1 轉速響應分析
這里采用增量式編碼器對實際轉速進行檢測,與估計轉速作對比。給定負載5N.m,給定轉速由300r/min上升到1000r/min,再降到500r/min,實驗結果如圖4(a),圖4(b)所示。
由圖4(c)可看出,轉速在300r/min和500r/min時,轉速誤差在20r/min左右;在高速1000r/min時,轉速誤差在25r/min左右;整個動態過程中最大誤差約為30r/min。由此可知,本文提出的控制方法,對電機轉速估計較為精確,能夠使電機保持穩定運行。
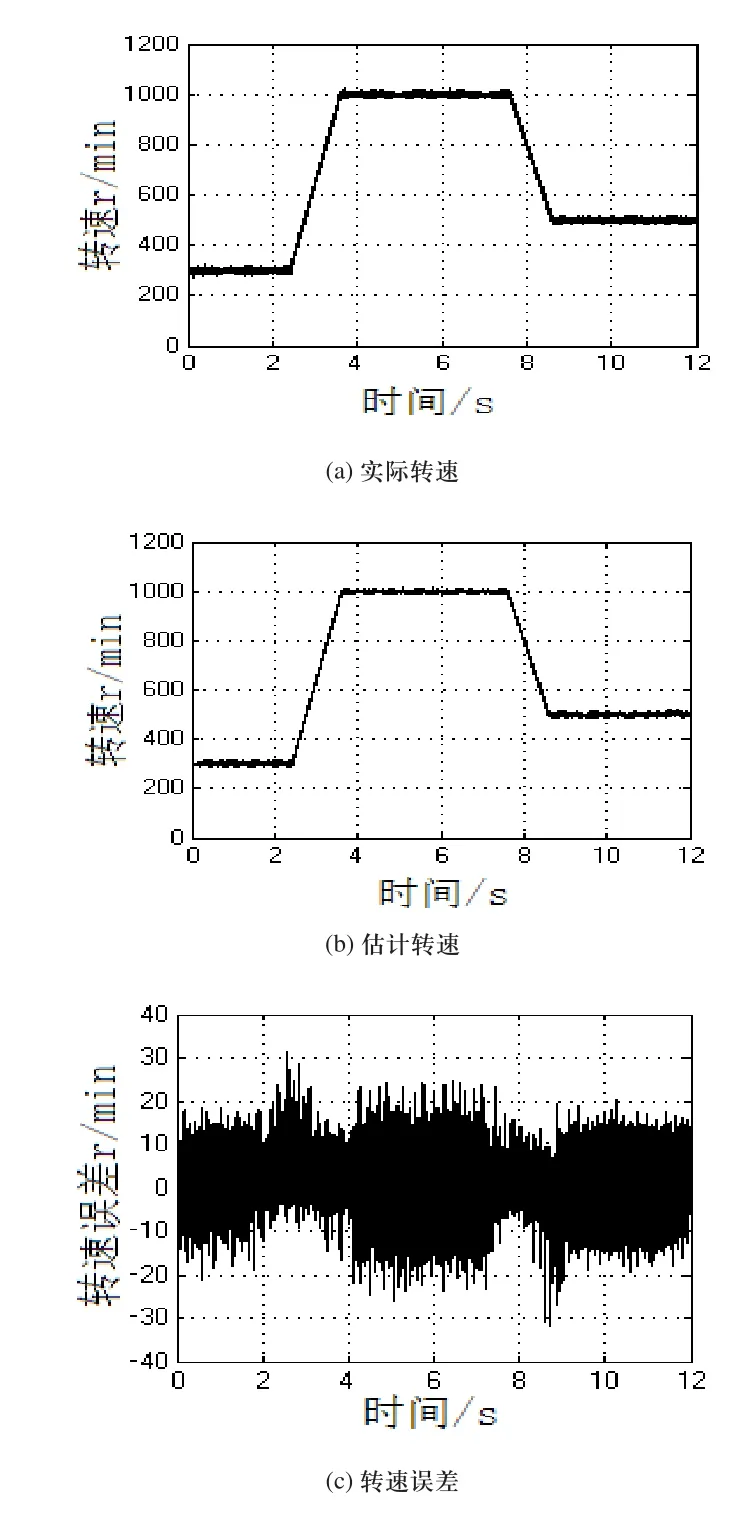
圖4 實際轉速與估計轉速實驗對比
4.2 轉矩和磁鏈分析
這里對傳統直接轉矩控制和基于無速度傳感器的SVM-DTC控制進行對比實驗。給定轉速500r/min,參考磁鏈1.1Wb,負載轉矩10N.m。穩態實驗結果如圖5、圖6所示。
由圖5可知,電機達到穩態后,傳統直接轉矩控制下的轉矩波動范圍為8~12N.m,基于無速度傳感器的SVM-DTC控制下的轉矩波動范圍為9~11N.m,轉矩波動明顯減小。由圖6可知,傳統直接轉矩控制下的磁鏈波動范圍為1.07~1.13Wb,基于無速度傳感器的SVMDTC控制下的磁鏈波動范圍在1.08~1.12Wb內,磁鏈波動得到較大抑制。
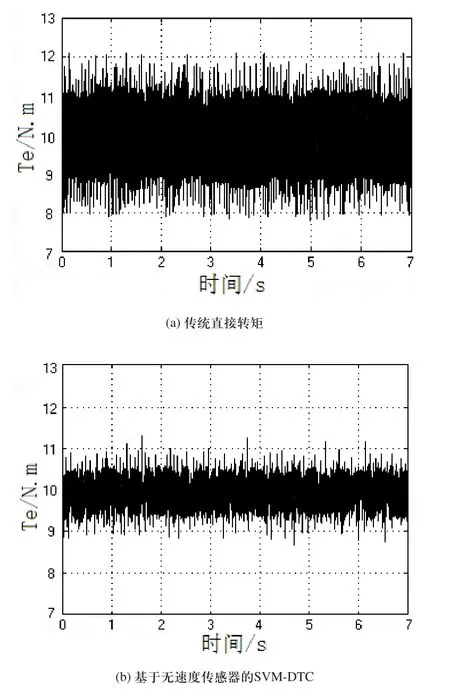
圖5 轉矩實驗對比圖
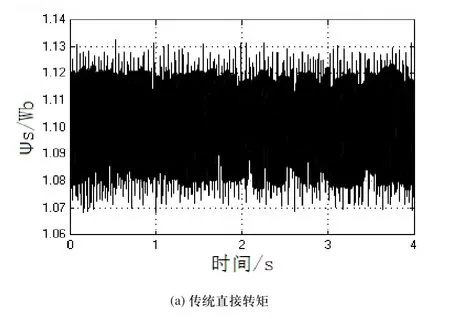
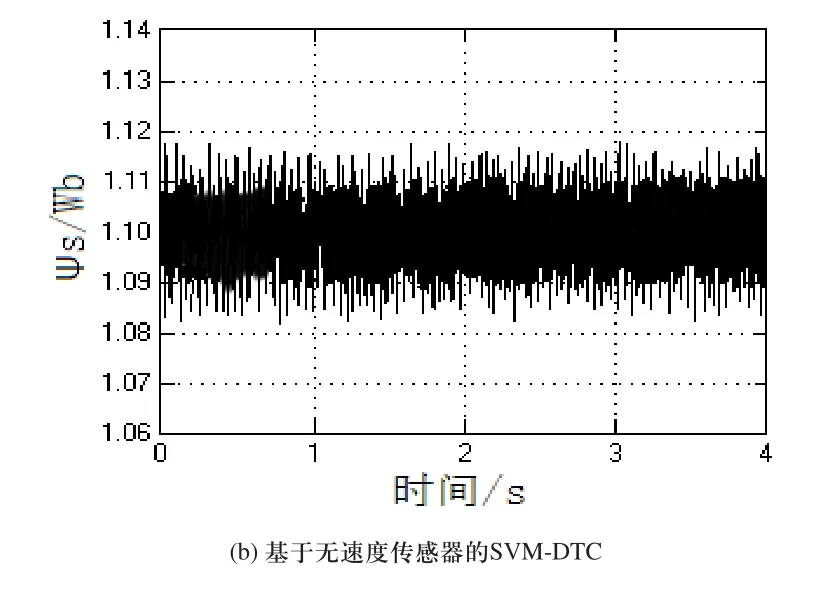
圖6 磁鏈實驗對比圖
5 結論
本文提出了一種基于無速度傳感器的SVM-DTC控制方法應用于PMSM。實驗證明,改進的滑模觀測器能夠精確地估算速度,保證了電機穩定運行;引入的空間矢量調制技術有效減小了轉矩和磁鏈波動,提高了穩態性能。
[1]韓崇偉.永磁同步電機直接轉矩控制技術研究進展[J].微電機,2016,49(1):75-81.
[2]李耀華.表面式PMSM直接轉矩控制電壓矢量選擇策略[J].電力電子技術,2010,44(9):47-49.
[3]徐艷平.基于占空比控制的永磁同步電機新型直接轉矩控制策略[J].電工技術學報,2009,24(10):27-32.
[4]Sandeep,S.Anantha,L.V.Prabhu,N.M.Renukappa,K.Suryanarayana.Speed control of IPMSM motor without rotor position sensors based on MRAS observer with space vector modulation[J].IEEE International Conference on Recent Trends in Electronics,Information & Communi-Cation Technology(RTEICT),2016,1841-1845.
[5]劉英培.基于擴展卡爾曼濾波器和空間電壓矢量調制的永磁同步電機直接轉矩控制[J].中國電機工程學報,2009,29(27):67-74.
[6]徐艷平.永磁同步電機無速度傳感器改進DTC研究[J].電力電子技術,2013,47(5):91-93.
[7]M.Ci0rrincione,A.Accetta,M.Pucci,and G.Vitale.MRAS speed observer for high-performance linear induction motor drives based on linear neural networks[J].IEEE Trans.Power Electron,2013,123-134.
[8]M.Jannati,S.Anbaran,D.Moha-mmad Zaheri,N.R.N.Idris,M.J.A.Aziz.A new speed sensorless SVM-DTC in Induction motor by using EKF[J].IEEE Student Conference on Research and Development,2013.
[9]丁文.兩級濾波滑模觀測器的永磁同步電機無位置傳感器控制[J].電機與控制學報,2012,16(11):1-10.
[10]D.Q.Guan,D.Xiao,M.F.Rahman.A new high-bandwidth sensorless direct torque controlled IPM synchronous machine drive using a hybrid sliding mode observer[J].2014 IEEE 5th International Symposium on Sensorless Control for Electrical Drives,2014,1-8.
