HXD2型機車制動缸死區輸入自適應補償
2018-01-18 09:03:32謝程程王桂榮
制造業自動化 2017年9期
關鍵詞:系統
崔 晶,謝程程,王桂榮
(1.西安鐵路職業技術學院 牽引動力學院,西安 710026;2.中鐵七局集團西安鐵路工程有限公司 試驗檢測分公司,西安710026;3.中國計量大學 機電工程學院,杭州 310018)
0 引言
HXD2型電力機車基礎制動裝置采用單側、雙閘瓦、帶閘瓦間隙自動調整器的獨立踏面制動單元。
閘瓦間隙自動調整器(俗稱閘調器)能根據閘瓦間隙的變化,通過調整螺母和引導螺母的配合,保證閘瓦與車輪的間隙正常[1]。當機車制動時,閘調器受到來自于制動缸的壓力,推動高摩合成閘瓦與輪對踏面進行直接接觸,并能夠控制閘瓦與輪對踏面的接觸程度,以逐漸增大摩擦力的方式實現能耗制動。在制動缸活塞桿的行程范圍內,閘調器可確保機車制動力不衰減[2]。
高壓氣體流經細長的管路和管路彎折、接頭及開口處所產生的沿程阻力和局部阻力會形成接觸表面粘滯和局部壓差而導致氣壓波動[3,4]。同時,理論研究中假想為絕對圓形的輪對踏面在實際工況中由于車體靜載荷及機車通過鋼軌接頭、道岔和不平順路段時所引起的踏面沖擊載荷而在徑向被壓縮,折算為輪對軸向周期性形變量,致使輪對縱向及垂向加速度增大,制動時閘瓦與輪對踏面接觸效果變差,并導致閘調器及閘瓦被反向擠壓,甚至會影響其可靠性和使用壽命[5]。因此,管路內氣壓的波動干擾、輪對形變和踏面沖擊成為影響制動缸閘調器及閘瓦位置是否得以精準控制的重要因素。
除過提升閘瓦的制作工藝和摩擦效能,實現高精度、高動態性能的閘瓦位置控制,防止其與輪對踏面過分接觸,則需要精確控制制動缸活塞所受風壓。在實際制動系統中,換向閥負責切換氣路開閉,其開度的大小決定壓力氣體的流速。然而,由于換向閥需克服靜態摩擦及殘存的氣壓攝動方能移動,因此常發生閥口游移和潤滑層磨損;此外,閥口處摩擦力較高而應變剛度較低,容易引發閥軸扭轉導致靜態工作點偏移,閥口導通發生時間滯后于系統的控制輸入,此時會出現機械滯后現象(俗稱死區),即閥口已經發生位移,但是對應的氣路還未導通致使輸入量不能進入系統產生作用[6]。因此風源壓力此時不能進入制動缸,閘瓦位置移動發生時滯。只有當控制器的輸出量足以克服死區的跳變范圍,系統才會切換到正常的工作模式。
工程實際中,常通過采用機械精加工的辦法削弱死區范圍,最大程度上減小過程偏差度,但受制于機械結構和制造精度,死區難以全部消除。因此,需結合控制理論進一步提升具有死區輸入的閉環伺服系統的工作效能,補償死區非線性。其中,文獻[7]采用微分自適應律估計未知死區參數,采用飽和函數代替符號函數消除顫振,利用魯棒方法消除有界誤差項,實現誤差有界收斂,使得系統對期望目標的跟蹤漸進穩定。文獻[8]利用自適應模糊邏輯系統的萬能逼近特點,在線逼近機電齒隙伺服系統中的未知參數和非線性環節,并引入齒隙近似死區函數避免死區函數的不可微,設計了魯棒控制項抑制建模誤差的影響,實現閉環伺服系統的有界跟蹤。
然而,上述兩種控制器的設計并未考慮換向閥閥芯游移方向不確定所引發的傳動問題。制動狀態下,死區效應會使得閥口行程誤差增加,導通時間滯后,導致閥口所受氣壓沖擊較為猛烈,閥芯因此產生顫振,雖然此顫振不至于影響機車制動,卻導致其游移方向產生不確定性。同時,機車制動缸某些標稱參數會因外界條件變化而發生時變和漂移,其內壁與活塞的接觸面并非嚴格配合,導致內部壓力漏損。
針對上述制動缸閘瓦位置控制系統中存在的標稱參數漂移及內泄漏、輪對徑向周期性形變干擾和閥芯因氣壓沖擊產生顫振而游移導致控制方向不確定以及因工作點偏移而產生死區的實際工況,結合虛擬反饋控制律具有較強的誤差收斂效果,同時考慮Nussbaum增益對控制方向不確定的系統具有較好的控制能力的特點,本文采用基于虛擬反饋的Nussbaum增益自適應控制對機車制動缸閘瓦位置控制系統的控制器進行設計,使得系統在制動工況下輸出信號快速精確跟蹤給定值的同時,亦能夠克服內部參數漂移和外部壓力波動干擾。
1 制動缸氣動伺服系統建模
為推導具有死區輸入的制動缸氣動伺服系統的數學模型,特做假設如下:
1)供氣壓力連續,不計氣體外泄漏;
2)不計氣體局部、沿程能量損失;
3)流經伺服閥節流孔的氣體絕熱,氣體比熱和節流孔流量系數一定;
4)制動缸內氣體熱力學呈等溫變化[9],且不計閥口溫漂;
5)滾珠絲杠傳動系數一定;
6)閘瓦位移量及其各階導數連續有界。
經簡化后的HXD2機車制動系統如圖1所示。可知,制動狀態(1YA)時,制動管與大氣連通排風減壓,副風缸與制動缸連通,使制動缸活塞受壓下移;緩解狀態(2YA)時,制動管向副風缸充風,制動缸與大氣連接,活塞在復位彈簧的作用下上移。換向閥伴隨機車制動與緩解而往復切換于制動工位和緩解工位,楔形裝置放大制動缸活塞的位移量,通過控制調整螺母的轉動圈數控制滾珠絲杠螺桿的位移量:制動狀態,調整螺母順時針轉動,螺桿推動活塞桿連動閘瓦向輪對踏面移動;緩解狀態,調整螺母逆時針轉動,螺桿帶動活塞桿連動閘瓦遠離輪對踏面。
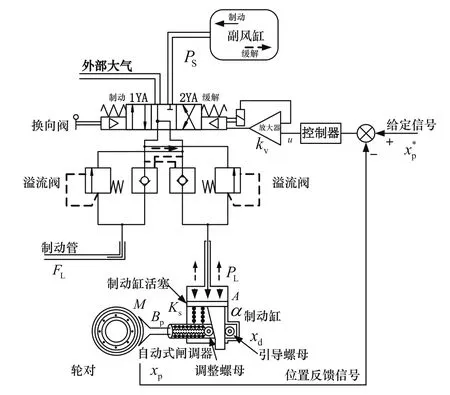
圖1 HXD2機車制動系統簡化
根據文獻[10],機車制動缸閥口死區模型如下:
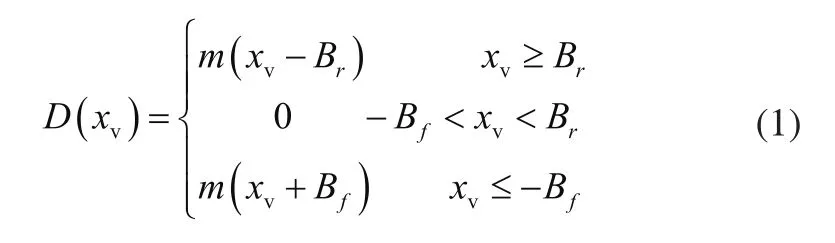
式中,m為死區斜率,Br和Bf為死區切換點,xv為伺服閥閥芯位移。
由圖1可知,HXD2機車制動缸為非對稱閥控缸,其氣體流量連續性方程為:

式中,A為活塞作用面積;R為氣體常數;T為氣體絕對溫度;PS為副風缸供氣壓力;PL為制動缸作用壓力;Ct為氣體內泄漏量;V為氣缸內腔體積;n為氣體多變指數;xd為制動缸活塞位移。
制動缸活塞運動學方程為:

式中,A,PL定義同上;M為活塞及閘瓦質量;Bp為黏性阻尼系數;Ks為活塞等效彈性負載系數,FL為風壓波動干擾。
伺服閥閥口流量方程為:

式中,Cd為閥口流量系數;w為閥口面積梯度;xv為閥芯位移量,為氣體密度。
楔形放大機構模型為:

式中,xd為制動缸活塞位移;α為楔角角度;?為螺母轉角,d0為調整螺母中徑。
滾珠絲杠傳動模型為:

伺服閥增益方程為:

式中,kv>0為伺服閥放大器增益系數,u為電壓控制輸入;xv為伺服閥閥芯位移。
依據上述分析,建立機車制動缸閘瓦位控系統等效氣動伺服數學模型如下:


式中,控制量前的“±”表示閥口游移方向。

2 自適應控制器設計
定義跟蹤誤差為:

設計虛擬反饋控制函數為:

式中,c1,c2均為非負的待設計參數。
設計自適應控制器如下:


3 閉環穩定性分析
引理1[12]: 設V(t)在上連續,k(t)在上連續可微,且對設N(k)是偶的光滑的Nussbaum類型函數,θ為非零常數。若對有:


定義Lyapunov候選函數如下:

對上式求導,并帶入式(10)至式(14)后可得:


參照不等式:
可知:

將上式進一步轉化,并整理可得:

式中:
對式(20)兩邊同時乘以emt,并對t積分可知:

由引理1可推知:
由Babalat引理可知,W有界并收斂,結合式(16)可得,閉環系統所有信號z1、均為半全局一致終結有界并收斂于0[13,14]。
4 仿真結果及分析
對制動缸閘瓦位置控制系統分別采用基于虛擬反饋控制律的自適應控制器(VFAC)和模糊PID控制器進行仿真研究,所得到的閘瓦位置指令跟蹤曲線如圖2所示。
考慮實際系統輸入存在延遲,并非直接階躍跳變,而是以指數形式趨近于穩態,故設定信號輸入為:
式中,xs=1mm;tr=0.02s。
考慮管路中存在的壓力波動、踏面沖擊以及承受輪對擠壓的壓力攝動,定義外界時變壓力擾動及因系統工作點變化所引起的內部參數攝動分別為:

制動缸閘瓦位置控制系統標稱參數如表1所示。
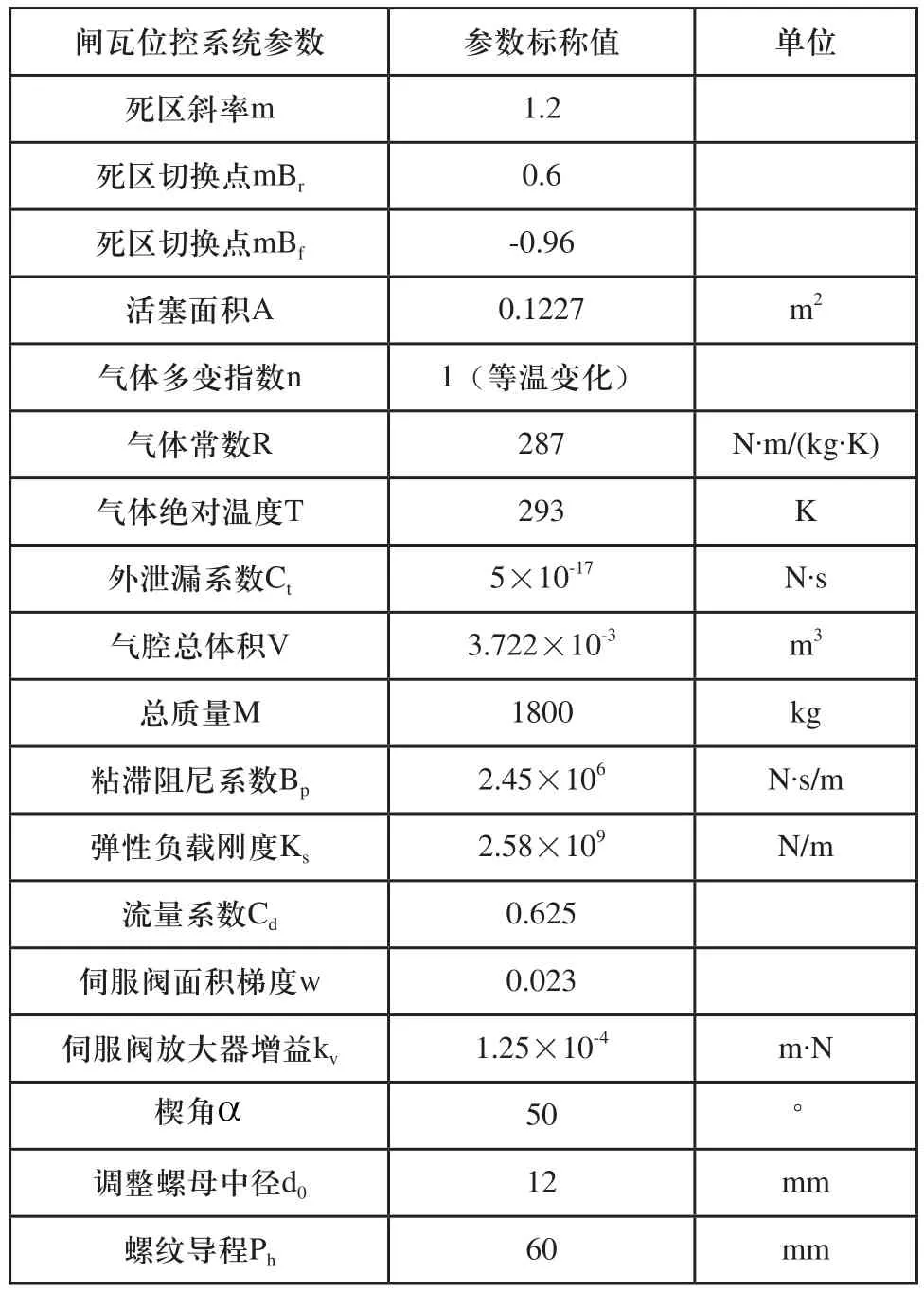
表1 制動缸閘瓦位置控制系統參數標稱值
由圖2、圖3可知,采用模糊PID的位置控制系統雖然能夠根據模糊規則的變化較為有效抑制擾動影響,但上升時間內由于模糊控制規則較為固定,使輸出滯后,跟蹤效果不佳(上升時間長達0.2s,跟蹤誤差最大接近0.33mm,恢復跟蹤時間接近0.2s);而VFAC由于針對干擾和參數時變而設計,控制器設計過程中遵循Lyapunov穩定性原理,故可確保系統穩態無超調,有效抵消參數攝動和外界較大擾動的影響,形成近似無偏跟蹤;其誤差曲線在歷經上升時間及調整時間后迅速收斂至0(跟蹤誤差最大接近0.002mm,恢復跟蹤時間接近0.1s),表明其對應的輸出量已恢復跟蹤輸入量。由圖4、圖5可知,相比于模糊PID依據模糊規則不斷調整致使控制輸入存在抖振,VFAC由于對參數自適應估計,且能夠抑制擾動及未建模動態對控制量的影響,使控制輸入在零點附近切換平滑無抖振,且較模糊PID控制輸入曲線(用時0.12s)更為迅速收斂于零狀態(用時0.05s),其正向和負向控制所對應的Nussbaum類型函數均一致有界并收斂,說明系統在仿真時間內可以達到一致漸進穩定狀態。
綜上所述,制動缸閘瓦位置控制系統具備較強魯棒性,可有效克服外界壓力擾動和內部參數攝動,對輸入指令實現近似無偏跟蹤。

圖2 位置輸入指令跟蹤曲線

圖3 位置跟蹤誤差曲線

圖4 控制量輸入曲線
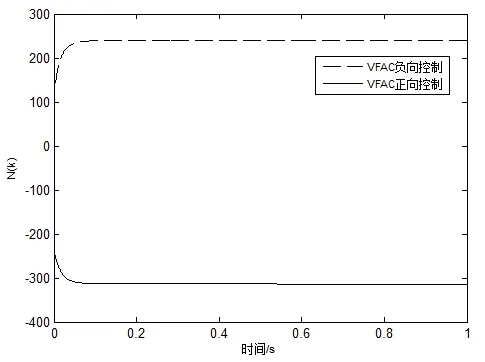
圖5 Nussbaum函數曲線
5 結論
本文針對HXD2型電力機車制動缸閘瓦位置控制系統中換向閥閥芯因顫振而游移導致控制方向未知以及因工作點偏移導致輸出響應滯后而引發死區輸入的實際工況,引入Nussbaum類型函數,設計了一種基于虛擬反饋控制律的自適應控制器;設計了針對系統工作點變化所引起的內部標稱參數攝動的參數自適應律;設計了針對輪對徑向周期形變干擾的參數自適應律。
由推理和仿真結果知,本文所設計的控制器具有優點如下:
1)可以實現雙向傳動控制,系統輸出能夠在有限時間內實現快速收斂,具有較強的魯棒性;
2)能夠抑制系統內部的參數攝動和外界線路激擾;具備良好的動態特性,對輸入指令可實現近似無偏跟蹤。
如何將本文理論研究成果與實際應用相結合是下一步研究的重點。
[1]李益民,馬金法,黃志高.交流電力機車制動系統[M].成都:西南交通大學出版社,2014.
[2]崔晶,張省偉.電力機車總體及走行部[M].成都:西南交通大學出版社,2016.
[3]馬艷玲,黃進,張丹.基于反步自適應控制的伺服系統齒隙補償[J].控制理論與應用,2008,25(6):1090-1094.
[4]Joe H, Kim M,Yu S. Second-order sliding mode control for autonomous underwater vehicle in the presence of unknown disturbances[J].Nonlinear Dynamics,2014,78(1):183-196.
[5]Lin K J. Sliding mode control design for uncertain singular systems[J].Applied Mechanics and Materials,2012,14(5):16-20.
[6]馬艷玲.含齒隙環節伺服系統的補償控制[D].西安:西安電子科技大學,2008.
[7]朱勝,孫明軒,王雪潔,等.具有輸入死區的非線性系統的魯棒重復控制[J].自動化學報,2013,39(6):908-912.
[8]杜仁慧,吳益飛,陳威,等.電液伺服系統的非線性魯棒自適應控制[J].控制理論與應用,2013,30(02):254-260.
[9]訚耀保,荒木獻次.具有非對稱氣動伺服閥的氣動壓力控制系統建模與分析[J].中國機械工程,2009,20(17):2107-2111.
[10]郭健,姚斌,吳益飛,等.具有輸入齒隙的一類非線性不確定系統自適應魯棒控制[J].控制與決策,2010,25(10):1580-1584.
[11]許衍澤.具有輸入飽和的軋機電液伺服系統多模型切換自適應控制研究[D].秦皇島:燕山大學,2014.
[12]Ge S S, Hong F, Lee T H. Adaptive neural control of nonlinear time-delay system with unknown virtual control coefficients[J]. IEEE Trans.on Systems, Man and Cybernetics,2004,34(1):499-516.
[13]劉棕成,董新民,薛建平,等.一類不確定執行器非線性系統的自適應控制[J].系統工程與電子技術,2015,37(1):163-168.
[14]朱勝,孫明軒,何熊熊.輸入具有齒隙非線性特性的周期系統的自適應控制[J].控制理論與應用,2012,29(04):535-538.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32
