
無人機高精度目標定位技術研究
2018-01-24 02:41:37曹陽
移動信息 2017年8期
曹 陽
南京中設航空科技發展有限公司,江蘇 南京 210000
1 無人機目標定位關鍵技術
借助無人機載體目標定位測量系統,無人機可以對系統設定的目標進行精準定位,通過對導航定位信息、無人機位置角度信息等解算,能夠實現對目標的高精度定位,廣泛應用于戰場偵查。
無人機通常采用的是單站測角、測距定位方式。這類方式,在實際的運用中能夠在較短的時間內實現靜態目標定位、動態目標定位。但是,依舊存在一些問題,主要是無法實現目標的持續定位,定位的精準度也不夠高。由于無人機上只裝載了一個激光指示設備,因此,一次只能對一個目標進行定位。如果需要實現多個目標定位,通常采取的是連續完成多個單目標定位來實現,導致在任務完成過程中耗時比較長,影響工作效率。
除此之外,還有慣性導航系統定位、空間三點定位、空間兩點交匯等定位方式,但是均屬于單一的組合模式,在使用中均存在著一定的缺陷。在信息時代背景下,應用信息融合理念,組建多傳感器的導航系統,借助機載導航系統,全面提升導航的精準度、可靠性。如表 1所示,在國外多組合信息融合載體已經逐漸應用在無人機上。

表1 國外無人機機載組合模式導航系統統計表
2 無人機高精度定位技術
2.1 聯邦濾波器結構
聯邦濾波算法屬于兩級濾波結構,能夠借助無人機機載內的導航系統,對信息數據進行最優估算,以此提升無人機載體的精準定位[1]。本文對無人機高精準定位技術的闡述主要以聯邦濾波為主的無人機高精準定位為主,主要如下:
聯邦濾波屬于分散化濾波,每個導航子系統和慣性導航系統構建成卡爾曼濾波子系統,具體結構如圖1所示。

圖1 聯邦濾波器結構示意圖
聯邦濾波器內各個子系統不會互相干擾,主要是利用了方差上界技術,將各個濾波器內的相關性及時消除,在信息分配上也是借助了聯邦濾波實現,具體的原則為:

在不同的信息分配策略下,聯邦濾波器具有不同的濾波結構。(1)零復位模式。這類模式對子濾波器的影響不大,且兼容力較好,但是,濾波精準度不夠高。(2)重置模式。這類模式能夠將信息平均分配給各個濾波器,濾波精準度比較高。但是,在子系統發生故障時,信息重置會影響其他健康的子系統,且系統的兼容性比較差。(3)融合重置模式。將全局的估算值作為濾波的計算結果,這類模式的結構比較簡單,濾波的精準度比較高,但是兼容性比較差。(4)無復位模式。這類模式下各個子濾波器能夠實現獨立工作,子系統之間也不會相互影響,但是濾波的精準性不高。
2.2 故障信息分配
在融合重置模式下的聯邦濾波器應用中,若是某個子系統出現故障,則將被隔離出去,導航系統內的子系統能夠重新構建聯邦濾波器。信息分配系數為:。

由于在故障隔離期間,需要對故障子系統進行檢測,進而判斷故障子系統是否恢復運行,借助系統的正確信息,對子系統測量的信息進行故障判斷。由此可見,在故障檢測期間,依舊需要為故障子系統提供信息。同時將主系統內的最優計算結果分配給故障子系統,避免出現局部優、次故障檢測影響。
2.3 噪聲容錯聯邦濾波系統
在噪聲容錯背景下的聯邦濾波器結構如圖2所示。同之前的系統相比較,這類系統中刪除了故障隔離模塊,能夠借助子濾波器,實現傳感故障的最優化[2]。噪聲容錯聯邦濾波系統主要是為了實現對故障子系統的軟隔離。
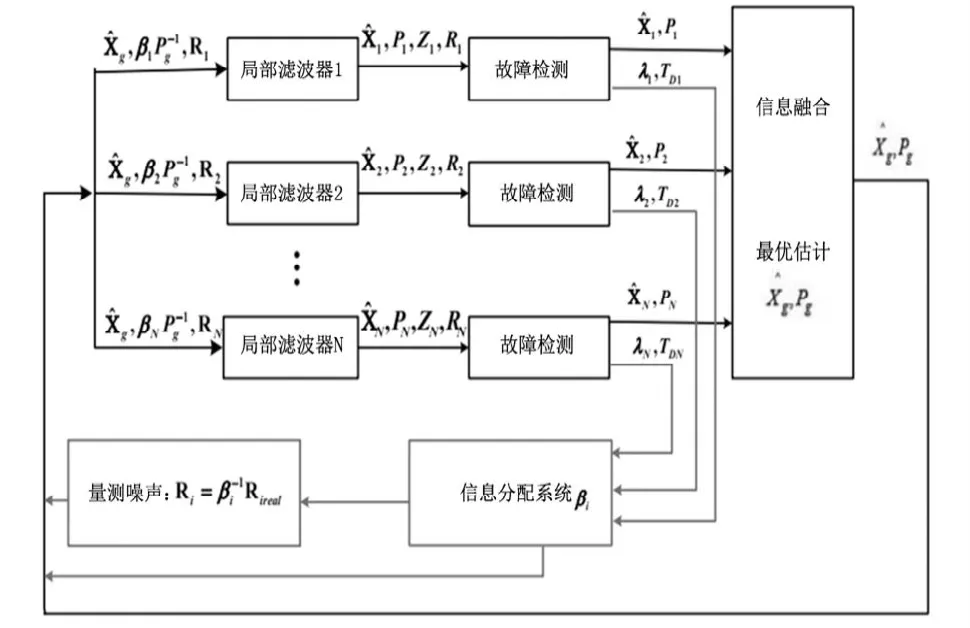
圖2 噪聲容錯聯邦濾波系統結構示意圖
2.4 故障檢測方法
信息融合下聯邦濾波的故障檢測方法主要是殘差卡方檢測方式。這類故障檢測法主要以測算為主,能夠對卡爾曼濾波系統內的信息進行判斷,能夠對一些檢測出故障,卻無法確定故障原因的系統故障進行合理測算。
故障檢測計算公式為:

若是系統內出現故障,則能夠對系統內的殘差均值進行測算,其公式為:

2.5 仿真應用
將無人機的飛行設置為“S”,總共飛行時間為1 800 s,其飛行軌跡如圖3所示。
最終得到的導航結果如表 2所示,通過分析表中數據得知,這類組合模式下,無人機的定位精準度較高,容錯聯邦濾波算法能夠及時處理故障檢測數據,避免子系統故障對組合導航造成影響,進而確保各類導航信息的精準性。

圖3 無人機飛行軌道模式示意圖
3 結束語
綜上所述,在信息融合背景下,聯邦濾波計算法能夠提升無人機定位的精準度。在實際應用中,可以實現高精準定位。若是測距角度存在一定誤差,則需要固定單站測角測距,精準固定目標的位置,將載機位置變化和目標位位置變化的定位精準度之間的誤差控制在最小范圍內。通過應用得知,這類定位模式定位精準度上更加穩定,具有較好的應用效益。
[1]袁玉敏.農業植保無人機高精度定位系統研究與設計——基于 GPS和 GPRS[J].農機化研究,2016,9(12):227-231.
[2]柏青青.無人機高精度目標定位中的組合導航系統在線標定技術[D].南京:南京航空航天大學,2015.
猜你喜歡
汽車維修與保養(2019年7期)2020-01-06 03:30:42
中華手工(2017年2期)2017-06-06 23:00:31
汽車維護與修理(2016年10期)2016-07-10 08:17:41
汽車維修與保養(2015年12期)2015-04-18 07:51:49
汽車維修與保養(2015年6期)2015-04-17 03:31:50
汽車維修與保養(2015年2期)2015-04-17 01:30:34
汽車維護與修理(2015年2期)2015-02-28 12:15:39
中外會展(2014年4期)2014-11-27 07:46:46
建筑創作(2001年3期)2001-08-22 18:48:14
祝您健康(1987年3期)1987-12-30 09:52:32
