微小衛(wèi)星聯(lián)合執(zhí)行機(jī)構(gòu)的遞階飽和姿態(tài)控制方法
2018-01-29 09:28:34吳云華
中國慣性技術(shù)學(xué)報 2017年6期
華 冰,陳 林,吳云華
(南京航空航天大學(xué),南京 210016)
大角度姿態(tài)機(jī)動是微小衛(wèi)星姿態(tài)控制中重要功能之一[1]。微小衛(wèi)星在執(zhí)行各種復(fù)雜的空間任務(wù)時(如對地穩(wěn)定到對日捕獲[5]、對日穩(wěn)定到對地捕獲[1]、對地面某特定目標(biāo)進(jìn)行長時間觀測或攝像[3]、單線陣相機(jī)立體成像[4]、增大衛(wèi)星過境的可觀測范圍及觀測數(shù)據(jù)量[5]等,),就要求微小衛(wèi)星在大角度姿態(tài)機(jī)動過程中不僅能達(dá)到較高的指向姿態(tài)精度和姿態(tài)穩(wěn)定性,而且要能夠快速機(jī)動[1]。傳統(tǒng)的單一執(zhí)行機(jī)構(gòu)控制方案不能很好地滿足姿態(tài)控制系統(tǒng)的要求,需要采用各種聯(lián)合姿態(tài)控制系統(tǒng)來優(yōu)化和實(shí)現(xiàn)準(zhǔn)確跟蹤、高穩(wěn)定度和快速機(jī)動的航天器姿態(tài)控制[6]。因此有必要對基于聯(lián)合執(zhí)行機(jī)構(gòu)的衛(wèi)星大角度姿態(tài)機(jī)動控制技術(shù)進(jìn)行研究。
聯(lián)合執(zhí)行機(jī)構(gòu)是指兩種及兩種以上的執(zhí)行機(jī)構(gòu)同時作為航天器姿態(tài)機(jī)動的執(zhí)行機(jī)構(gòu)[1]。隨著推進(jìn)技術(shù)的發(fā)展,許多衛(wèi)星都采用聯(lián)合執(zhí)行機(jī)構(gòu)進(jìn)行大角度姿態(tài)控制,如歐空局推出的昴宿星(Pleiades Satellite)、美國“數(shù)字地球”研制的World View系列衛(wèi)星等。印度空間研究機(jī)構(gòu)研制的Carto Sat-2的姿態(tài)執(zhí)行機(jī)構(gòu)采用反作用飛輪(0.3)、噴氣推力器(1),如圖1所示。美國軌道科學(xué)公司的華衛(wèi)2姿態(tài)控制方式采用三軸穩(wěn)定,姿態(tài)執(zhí)行機(jī)構(gòu)有四個反作用飛輪和推力器,如圖 2所示[5]。這些衛(wèi)星都可以實(shí)現(xiàn)大角度快速機(jī)動,在軍用和民用方面做出了重要貢獻(xiàn)。

圖1 Carto Sat-2Fig.1 Carto Sat-2

圖2 華衛(wèi)2Fig.2 Huwei 2
聯(lián)合執(zhí)行機(jī)構(gòu)的概念最早出現(xiàn)在文獻(xiàn)[6]。文獻(xiàn)[7]和文獻(xiàn)[8]提出了基于歐拉旋轉(zhuǎn)設(shè)計(jì)反饋控制律進(jìn)行姿態(tài)跟蹤控制,實(shí)現(xiàn)了聯(lián)合執(zhí)行大角度姿態(tài)控制算法。文獻(xiàn)[9]與文獻(xiàn)[10]提出了一種基于系統(tǒng)狀態(tài)的 PD閉環(huán)控制器,該控制器通過狀態(tài)增益反饋以達(dá)到單軸機(jī)動的時間最優(yōu)。文獻(xiàn)[11]提出了繞歐拉軸旋轉(zhuǎn)的遞階飽和大角度姿態(tài)控制算法。文獻(xiàn)[12]提出用推力器提供機(jī)動過程中所需的大力矩,同時用動量輪進(jìn)行高精度的調(diào)節(jié),以達(dá)到機(jī)動過程中的高精度的控制算法。文獻(xiàn)[13]針對聯(lián)合執(zhí)行機(jī)構(gòu)的問題提出了既提高機(jī)動速度又提高機(jī)動精度實(shí)物混合控制算法。文獻(xiàn)[14]提出基于Lyapunov方法設(shè)計(jì)了相應(yīng)的控制器,取得了很好的控制效果,但是并沒有解決執(zhí)行機(jī)構(gòu)力矩及轉(zhuǎn)速飽和等問題。文獻(xiàn)[15]研究了噴氣系統(tǒng)和多個動量輪聯(lián)合的非線性控制,采用的是Rodrigus參數(shù)而非四元數(shù)。文獻(xiàn)[16]基于噴氣系統(tǒng)和多個反作用輪的姿態(tài)控制算法。文獻(xiàn)[17]建立噴氣系統(tǒng)加偏置動量輪的衛(wèi)星姿態(tài)系統(tǒng)模型,進(jìn)一步設(shè)計(jì)LQG和Lyapunov控制兩種聯(lián)合控制律。文獻(xiàn)[18]的噴氣系統(tǒng)采用的都是 Bang-Bang控制,而文獻(xiàn)[19]對Bang-Bang控制和PWM(脈寬調(diào)制)控制進(jìn)行了對比分析,表明噴氣系統(tǒng)采用PWM更加節(jié)省燃料。
在實(shí)際小衛(wèi)星姿態(tài)控制系統(tǒng)中,推力器能夠輸出在大角度快速機(jī)動過程中所需要的大力矩,但不具備高精度姿態(tài)控制的能力。飛輪雖能夠輸出較為精準(zhǔn)的控制力矩,并且僅消耗電能,但不能提供快速機(jī)動過程中所需要的大力矩,因此有必要結(jié)合這兩個執(zhí)行機(jī)構(gòu)的優(yōu)點(diǎn),為微小衛(wèi)星的大角度快速機(jī)動提供大輸出和精度高的控制力矩[9]。由于衛(wèi)星姿態(tài)控制系統(tǒng)是一個復(fù)雜的非線性系統(tǒng),考慮到系統(tǒng)的非線性和復(fù)雜程度,又結(jié)合實(shí)際大角度姿態(tài)機(jī)動過程中力矩飽和角速度限制的因素,本文首先設(shè)計(jì)基于歐拉軸轉(zhuǎn)動的遞階飽和PD姿態(tài)機(jī)動控制方法,其次在PD控制律的基礎(chǔ)上,提出基于歐拉軸轉(zhuǎn)動的模糊PD控制律。執(zhí)行機(jī)構(gòu)采用冷氣推進(jìn)系統(tǒng)和反作用飛輪來提供大且精確的控制力矩,其中噴氣系統(tǒng)采用PWM波控制。本文采用的飛輪最大輸出力矩0.005,當(dāng)所需力矩超過0.005時,需冷氣推力器提供所需力矩,從而保證姿態(tài)機(jī)動快速精確的進(jìn)行。最后將提出的控制策略應(yīng)用于微小衛(wèi)星大角度姿態(tài)機(jī)動控制中,仿真結(jié)果表明模糊控制更適合非線性系統(tǒng)的環(huán)境,可使衛(wèi)星的期望姿態(tài)在參數(shù)不定的情況下具有更高的精度與穩(wěn)定性。
1 衛(wèi)星模型的建立
1.1 衛(wèi)星姿態(tài)運(yùn)動學(xué)
由四元數(shù)描述的衛(wèi)星姿態(tài)運(yùn)動學(xué)方程為[19]:
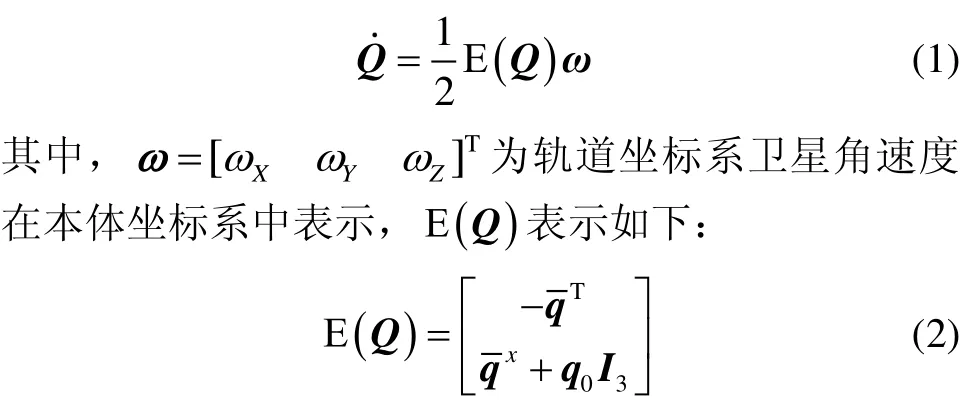
將式(1)表示成矩陣形式為:
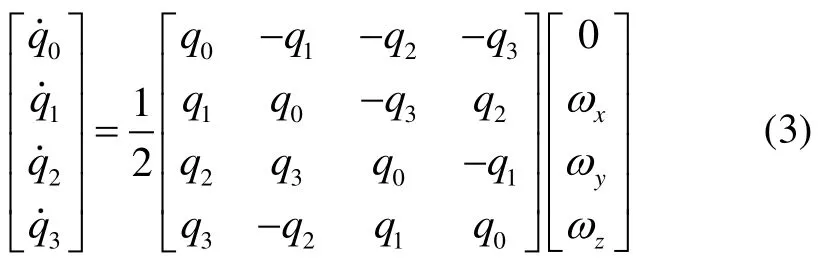
故得姿態(tài)運(yùn)動學(xué)方程為:

本文采用姿態(tài)誤差四元數(shù)作為姿態(tài)系統(tǒng)的控制量,設(shè)衛(wèi)星姿態(tài)敏感器測量得到的姿態(tài)四元數(shù)為,目標(biāo)姿態(tài)四元數(shù)為,則姿態(tài)誤差四元數(shù)為:

1.2 衛(wèi)星姿態(tài)動力學(xué)
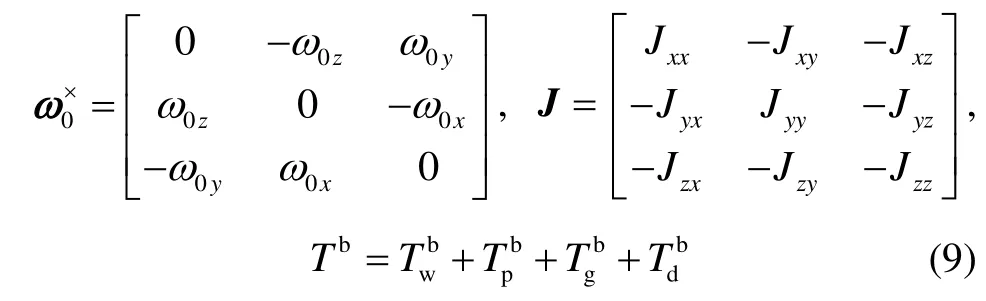
剛體衛(wèi)星動力學(xué)方程如下[17,20]:


將式(7)代入式(6)得:

其中,
1.3 聯(lián)合執(zhí)行模型
本文采用冷氣推力器和飛輪聯(lián)合作為微小衛(wèi)星主動姿態(tài)穩(wěn)定控制系統(tǒng)的執(zhí)行機(jī)構(gòu),聯(lián)合控制結(jié)構(gòu)圖如圖3所示。
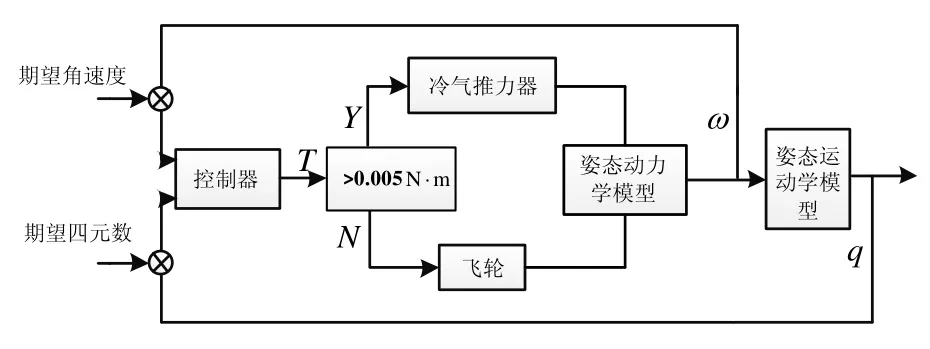
圖3 聯(lián)合控制結(jié)構(gòu)圖Fig.3 Structure of joint control
本文研究的飛輪采用力矩模式,反作用飛輪在星體各軸角動量變化所產(chǎn)生的控制力矩可表示為:

圖4表示一個典型的噴氣三軸穩(wěn)定姿態(tài)控制系統(tǒng)[21]。
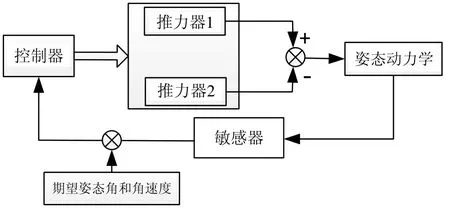
圖4 噴氣三軸姿態(tài)穩(wěn)定控制系統(tǒng)Fig.4 Three-axis attitude stability control system of air injection
對裝有三軸噴嘴所產(chǎn)生的控制力矩為:

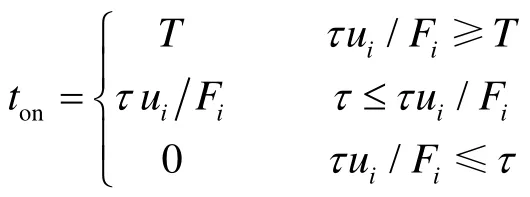
噴氣采用PWM控制,其結(jié)構(gòu)如圖6所示。

圖6 噴氣推力器控制律結(jié)構(gòu)圖Fig.6 Control law chart of jet thruster
噴嘴在一個控制周期內(nèi)開啟時間為[17]:
2 聯(lián)合執(zhí)行機(jī)構(gòu)控制律設(shè)計(jì)
2.1 基于歐拉軸轉(zhuǎn)動的遞階飽和PD控制律設(shè)計(jì)
在微小衛(wèi)星大角度姿態(tài)機(jī)動過程中,必須考慮衛(wèi)星執(zhí)行機(jī)構(gòu)最大輸出力矩,本文選擇冷氣推力器和飛輪作為微小衛(wèi)星的執(zhí)行機(jī)構(gòu),冷氣推力器最大輸出推力為,飛輪的推力選為。同時由于轉(zhuǎn)速陀螺測量精度限制,衛(wèi)星的姿態(tài)旋轉(zhuǎn)角速度不能超過一定限度。在衛(wèi)星姿態(tài)運(yùn)動學(xué)模型和動力學(xué)模型的條件下,考慮衛(wèi)星轉(zhuǎn)動慣量已知,且體旋轉(zhuǎn)角速度可測,得到如下形式的控制律:

飛輪控制力矩的限制為:

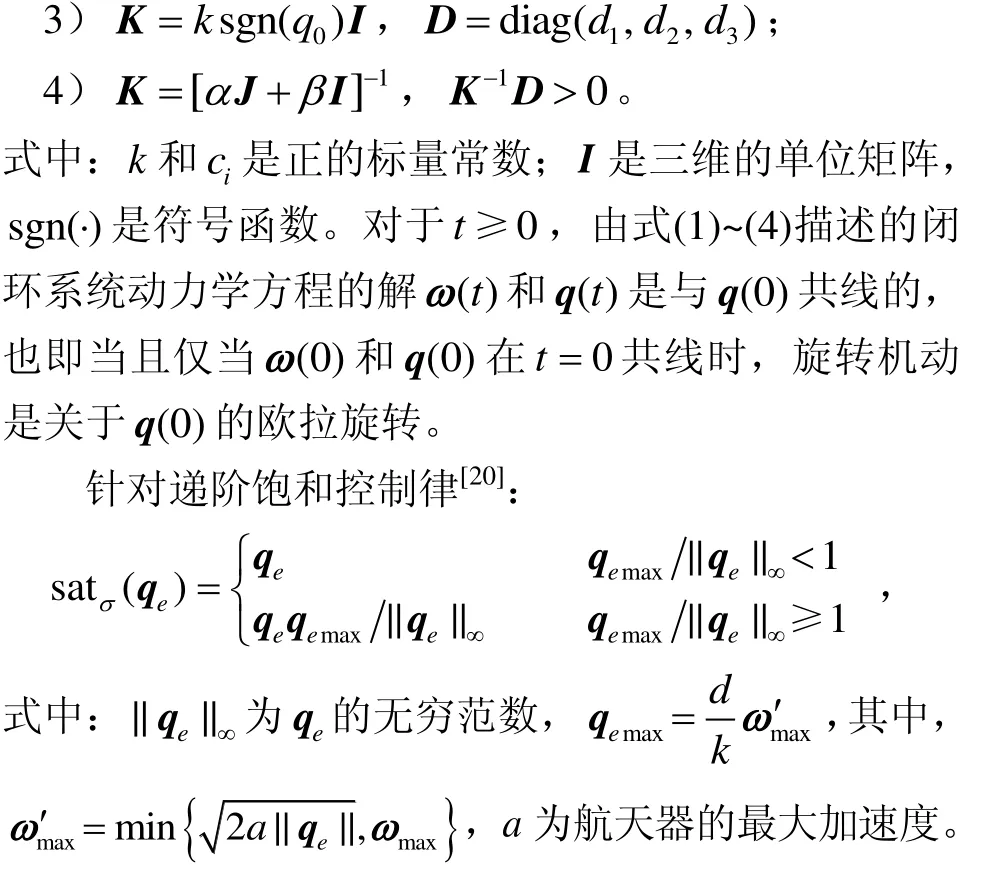
遞階飽和控制律可控制星體做繞歐拉軸的姿態(tài)機(jī)動,從而設(shè)計(jì)剛體衛(wèi)星遞階飽和控制律為:


忽略陀螺效應(yīng)耦合項(xiàng),航天器角速度穿越零點(diǎn)的條件為:

2.2 基于歐拉軸轉(zhuǎn)動的遞階飽和模糊PD控制律設(shè)計(jì)
本節(jié)將模糊系統(tǒng)和基于歐拉軸轉(zhuǎn)動的遞階飽和PD控制方法相結(jié)合,設(shè)計(jì)出基于歐拉軸轉(zhuǎn)動的遞階飽和模糊PD姿態(tài)控制律,實(shí)現(xiàn)PD姿態(tài)控制律的比例增益和微分增益由模糊邏輯系統(tǒng)根據(jù)實(shí)時的姿態(tài)誤差在線整定。此控制方法具有模糊控制算法簡單、快速的特點(diǎn),又具有傳統(tǒng)控制算法穩(wěn)態(tài)控制精度高,有完整理論基礎(chǔ)的特點(diǎn)[23]。
在 2.1節(jié)的基礎(chǔ)上設(shè)計(jì)基于歐拉軸轉(zhuǎn)動遞階飽和模糊PD控制律,在設(shè)計(jì)的過程中,必須考慮衛(wèi)星執(zhí)行機(jī)構(gòu)最大輸出的最大控制力矩,本文選擇冷氣推力器和飛輪作為微小衛(wèi)星的執(zhí)行機(jī)構(gòu)。控制律為:

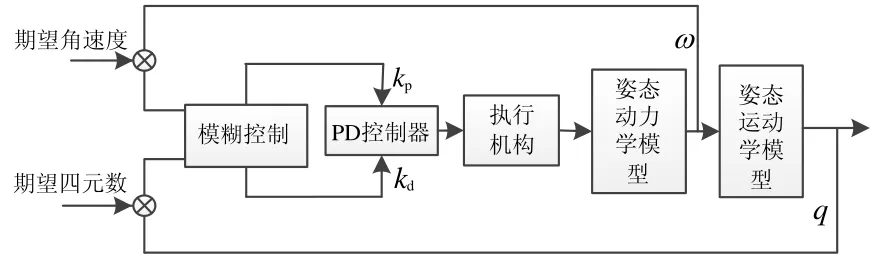
圖7 模糊PD控制律Fig.7 Fuzzy PD control law
圖7 中模糊控制器結(jié)構(gòu)的設(shè)計(jì)是確定模糊控制器的輸入和輸出變量。本文選擇二維模糊控制器,模糊控制器的控制規(guī)則可表現(xiàn)為[24]:
{負(fù)大,負(fù)中,負(fù)小,零,正小,正大,正大},其進(jìn)一步表示為:

為提高本論文模糊控制的精度,將四元數(shù)誤差及四元數(shù)誤差的一階導(dǎo)數(shù)作為輸入量,在選擇描述其狀態(tài)的詞匯時,將零分為正零和負(fù)零,如下:
輸入詞集:

輸出詞集:

隸屬度函數(shù)如圖8~10所示。
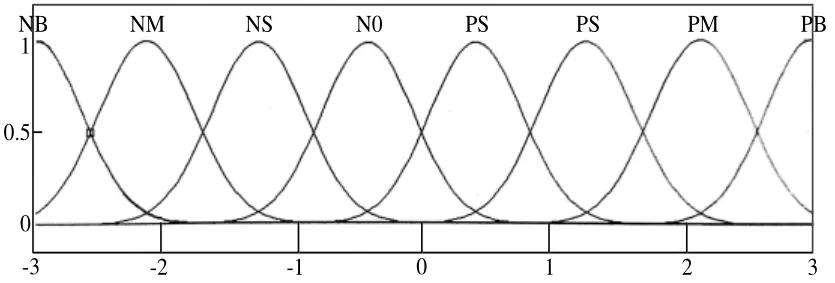
圖8 四元數(shù)誤差隸屬度函數(shù)Fig.8 Membership function of quaternion error
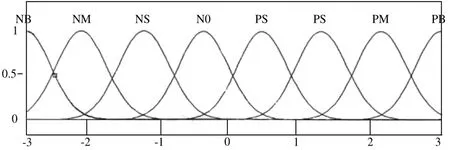
圖9 四元數(shù)誤差一階導(dǎo)隸屬度函數(shù)Fig.9 Membership function of quaternion error’s first-order derivative
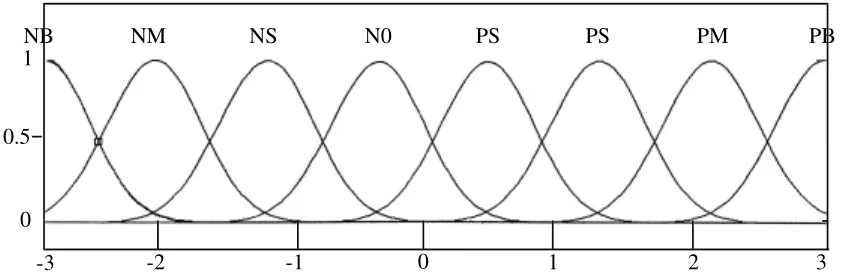
圖10 P、D參數(shù)隸屬度函數(shù)Fig.10 Membership function of P and D
本文采用的模糊規(guī)則表將四元數(shù)的誤差及四元數(shù)誤差一階導(dǎo)與PD參數(shù)一一對應(yīng),如表1和表2所示。
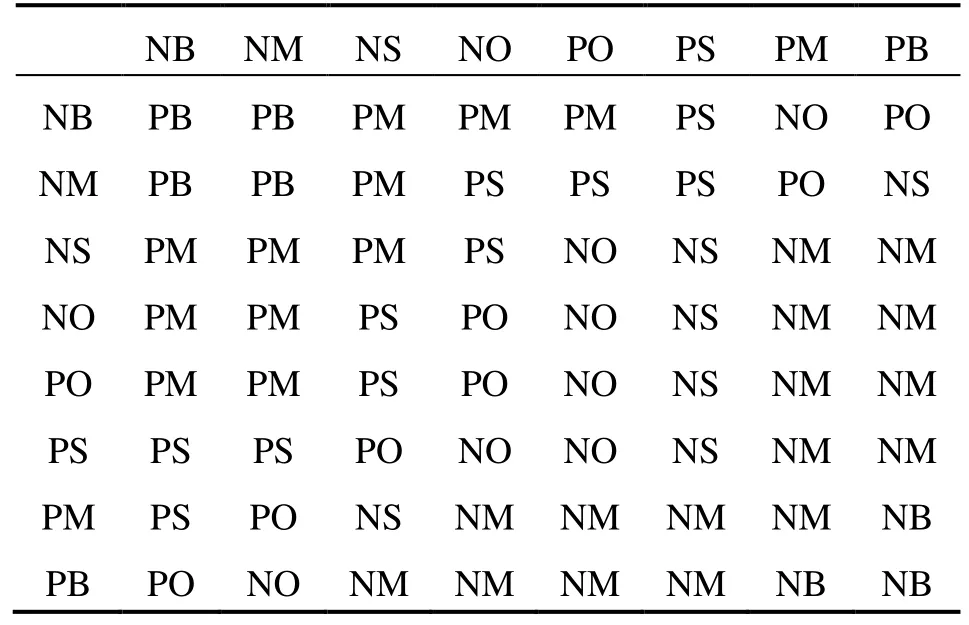
表1 Kp模糊規(guī)則表Tab.1 Kp Fuzzy control rule
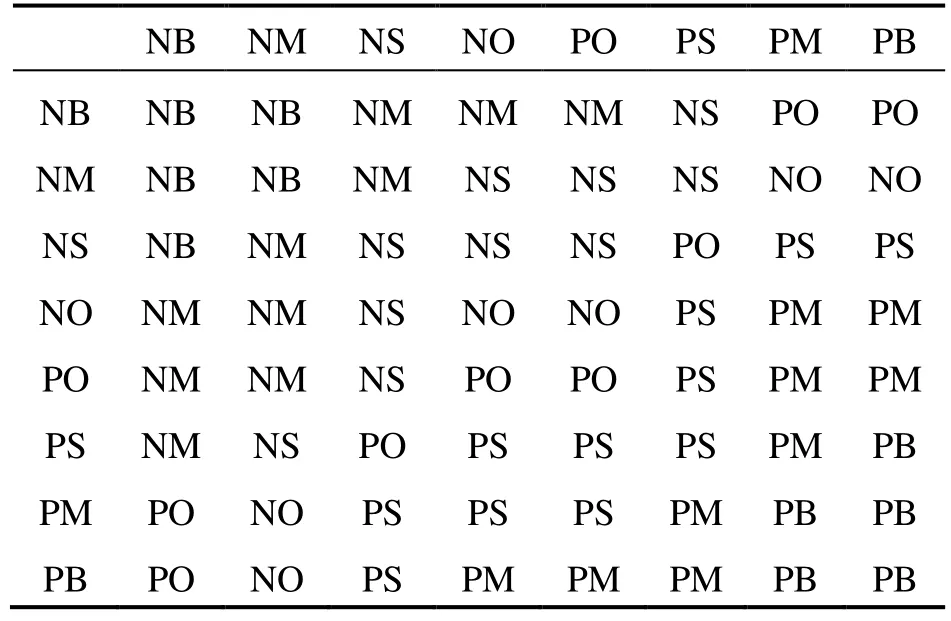
表2 Kd模糊規(guī)則表Tab.2 Kd Fuzzy control rule
3 仿真結(jié)果
3.1 PD控制律仿真結(jié)果及分析
由仿真結(jié)果可以看出,基于聯(lián)合執(zhí)行結(jié)構(gòu)的衛(wèi)星姿態(tài)遞階飽和控制律控制衛(wèi)星姿態(tài)機(jī)動需要耗時約150 s,在機(jī)動過程中飛輪輸出力矩限制在0.005 N?m內(nèi),冷氣推力器作為執(zhí)行機(jī)構(gòu)在0~4.5 s內(nèi)提供大力矩,在力矩大于 0.005 N?m時采用冷氣推力器提供力矩。衛(wèi)星繞軸機(jī)動,軸和軸飛輪的輸出力矩為零。衛(wèi)星軸角速度限制在0.5 (°)/s內(nèi)軸和軸飛輪的角速度為0°的情況。從仿真結(jié)果可以看出,姿態(tài)穩(wěn)定后,姿態(tài)角誤差控制在 0.003°以內(nèi),另外采用反饋四元數(shù)誤差為參數(shù)的衛(wèi)星姿態(tài)運(yùn)動學(xué)方程可以保證衛(wèi)星在大角度姿態(tài)機(jī)動時平滑經(jīng)過姿態(tài)角為0°的情況,克服采用方向余弦描述姿態(tài)運(yùn)動學(xué)時矩陣奇異的問題。衛(wèi)星的姿態(tài)機(jī)動包含三個階段:
1)加速段0~20 s,星體轉(zhuǎn)速持續(xù)增加并在加速段結(jié)束達(dá)到允許最大值0.5 (°)/s;2)滑行段20~84 s,Z軸方向轉(zhuǎn)速保持最大值滑行;3)減速段84 s~,衛(wèi)星姿態(tài)角速度重新回零,完成大角度姿態(tài)機(jī)動。
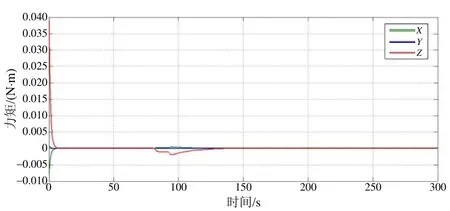
圖11 三軸力矩輸出曲線Fig.11 Three-axis torque output curve
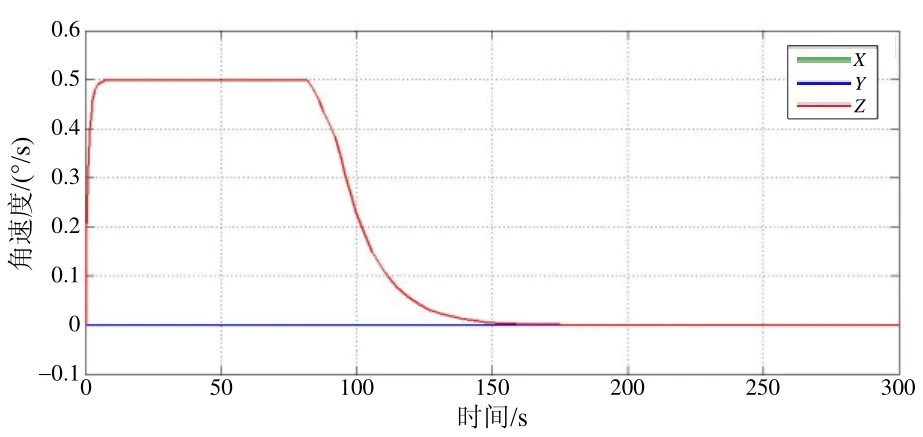
圖12 三軸角速度變化輸出曲線Fig.12 Three-axis angular velocity output curve
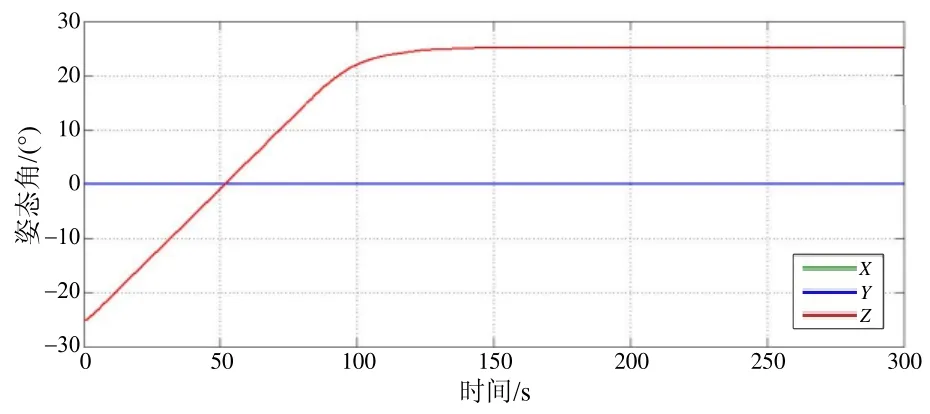
圖13 三軸角度變化輸出曲線Fig.13 Three-axis angle output curve
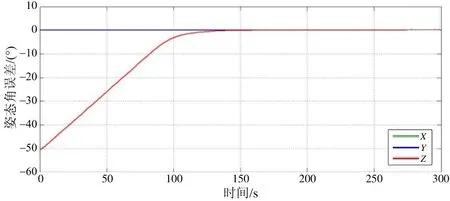
圖14 姿態(tài)角度誤差輸出曲線Fig.14 Attitude angle error output curve
3.2 模糊PD控制律仿真結(jié)果及分析
1)加速段 0~1.5 s,星體轉(zhuǎn)速持續(xù)增加并在加速段結(jié)束達(dá)到允許最大值0.5 (°)/s;
2)滑行段1.5~60 s,Z軸方向轉(zhuǎn)速保持最大值滑行;
3)減速段60 s~,衛(wèi)星姿態(tài)角速度重新回零,完成大角度姿態(tài)機(jī)動。
PD姿態(tài)控制律的比例增益和微分增益由模糊邏輯系統(tǒng)根據(jù)實(shí)時的姿態(tài)誤差在線整定結(jié)果,如圖15~20所示。

圖15 在線整定Kp值輸出曲線Fig.15 Online setting Kp output curve
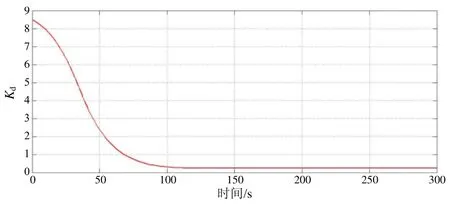
圖16 在線整定Kd值輸出曲線Fig.16 Online setting Kd output curve
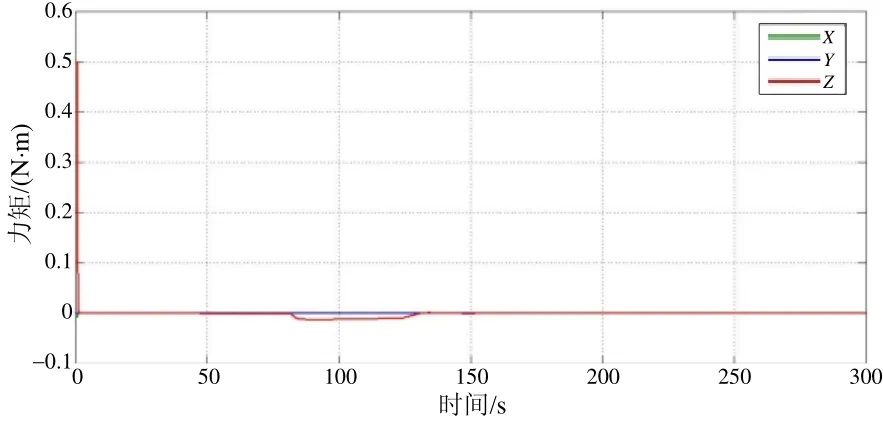
圖17 三軸力矩輸出曲線Fig.17 Three-axis torque output curve
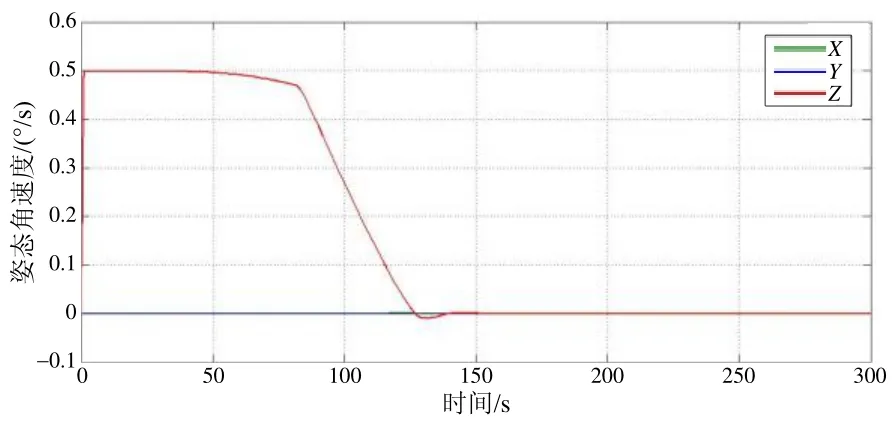
圖18 三軸角速度變化輸出曲線Fig.18 Three-axis angular velocity output curve
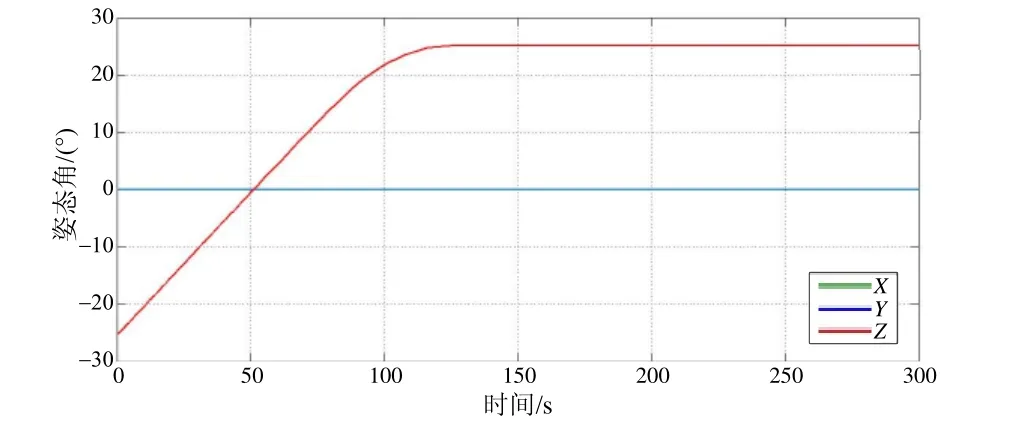
圖19 三軸角度變化輸出曲線Fig.19 Three-axis angle output curve
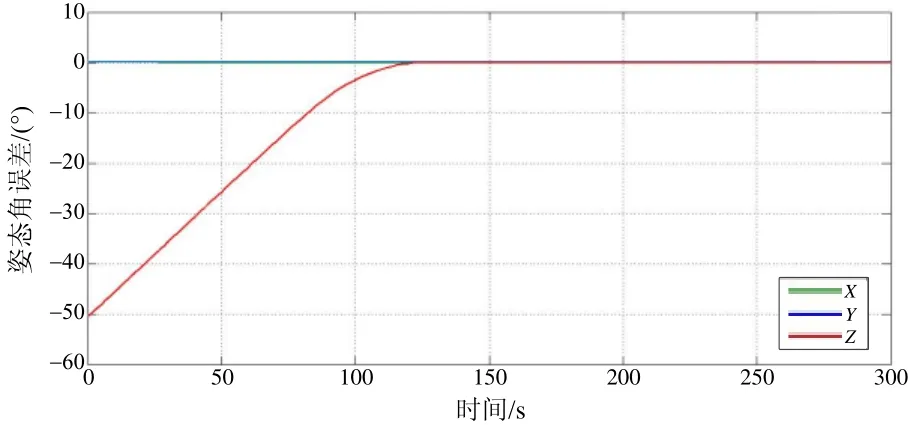
圖20 姿態(tài)角度誤差輸出曲線Fig.20 Attitude angle error output curve
進(jìn)一步對PD和模糊PD進(jìn)行比較分析,兩種控制律都采用基于遞階飽和的三軸穩(wěn)定姿態(tài)控制算法,執(zhí)行機(jī)構(gòu)都采用冷氣推進(jìn)器和飛輪聯(lián)合執(zhí)行機(jī)構(gòu),比較結(jié)果見如表3所示。

表3 聯(lián)合執(zhí)行機(jī)構(gòu)控制算法比較Tab.3 Comparison on control algorithms of combination actuator
從表3可看出,模糊PD三軸穩(wěn)定姿態(tài)控制律在系統(tǒng)穩(wěn)定以及衛(wèi)星機(jī)動的三個階段所用時間上略優(yōu)于PD三軸穩(wěn)定控制律,同時冷氣推力系統(tǒng)噴氣時間大大縮短,導(dǎo)致冷氣消耗也大大減小,適合于微小衛(wèi)星的星載。
4 結(jié) 論
本文針對基于歐拉軸轉(zhuǎn)動的遞階飽和微小衛(wèi)星聯(lián)合執(zhí)行機(jī)構(gòu)姿態(tài)控制,設(shè)計(jì)了PD和模糊PD兩種控制律控制噴氣/飛輪進(jìn)行姿態(tài)大角度機(jī)動。聯(lián)合執(zhí)行機(jī)構(gòu)可以避免衛(wèi)星在單獨(dú)采用飛輪控制時控制力矩頻繁的飽和卸載的情況。仿真表明,本文設(shè)計(jì)的模糊PD控制方法較PD控制方法縮短了收斂時間,節(jié)省噴氣燃料,同時具有較高的控制精度并且控制律設(shè)計(jì)簡便。綜合而言,模糊PD姿態(tài)控制算法既具有模糊控制算法簡單、快速的特點(diǎn),又具有傳統(tǒng)PD控制算法穩(wěn)態(tài)控制精度高,有完整理論基礎(chǔ)的特點(diǎn),適合用于微小衛(wèi)星的星載。
(
):
[1] 葉東, 孫兆偉, 王劍穎. 敏捷衛(wèi)星的聯(lián)合執(zhí)行機(jī)構(gòu)控制策略[J]. 航空學(xué)報, 2012, 33(6): 1108-1115.Ye D, Sun Z W, Wang J Y. Control strategy of hybrid actuator for agile satellites[J]. Acta Aoronautica et Astronautica Sinica, 2012, 33(6): 1108-1115.
[2] Wu S N, Sun X Y, Sun Z W, et al. Sliding-mode control for staring-mode spacecraft using a disturbance observer[J].Journal of Aerospace Engineering, 2010, 224(G2): 215-224.[3] Longbotham N, Bleiler C, ChaapelC. Spectral classification of WorldView2 multi-angle sequence[C]//IEEE GRSS and ISPRS Joint Urban Remote Sensing Event. 2011:109-112.
[4] 高樺, 鐘昊. 飛行器姿態(tài)大角度機(jī)動聯(lián)合控制物理仿真技術(shù)研究[J]. 計(jì)算機(jī)測量與控制, 2013, 18(10).2315-2317.Gao H, Zhong H. Physical simulation technology research for combined control of large angle maneuver of spacecraft[J]. Computer Measurement and Control, 2013,18(10): 2315-2317.
[5] 徐云, 朱欣華, 蘇巖. 一種基于坐標(biāo)系級聯(lián)的攻角探測方法[J]. 中國慣性技術(shù)學(xué)報, 2016, 24(2): 196-201.Xu Y, Zhu X H, Su Y. Attack-angle detection method based on cascaded coordinate systems[J]. Journal of Chinese Inertial Technology, 2016, 24(2): 196-201.
[6] Chen X J, Steyn W H. Robust combined eigenaxis slew manoeuvre[C]//AIAA Guidance, Navigation, and Control Conference. 1999: 521-529.
[7] Liu Q, Wie B. Robust time-optimal control of uncertain flexible spacecraft[J]. Journal of Guidance Control and Dynamics, 1992, 15(3): 597-604.
[8] Wie B, Lu J B. Feedback control logic for spacecraft eigenaxis rotations under slew rate and control constraints[J]. Journal of Guidance Control and Dynamics, 1995,18(6): 1372-1379.
[9] Newman W S. Robust near time-optimal control[J]. IEEE Transactions on Automatic Control, 1990, 35(7): 841-844.
[10] Dodds S J, Vittek J. Spacecraft attitude control using an induction motor actuated reaction wheel with sensorless forced dynamic drive[C]//Proceedings of 1998 IEEE Colloquium on All Electric Aircraft. London, 1998: 1-14.
[11] 董朝陽, 華瑩, 陳宇. 空間飛行器大角度機(jī)動遞階飽和控制律設(shè)計(jì)[J]. 宇航學(xué)報, 2006, 27(5): 974-978.Dong C Y, Hua Y, Chen Y, et al. A cascade-saturation fuzzy variable structure control for spacecraft large angle attitude maneuvers[J]. Journal of Astronautics, 2006, 27(5):974-978.
[12] Hall C D, Tsiotras P, Shen H J. Tracking rigid body motion using thrusters and momentum wheels[J]. Journal of the Astronautical Sciences, 2002, 50(3): 311-323.
[13] Verbin D, Lappas V J. Rapid rotational maneuvering of rigid satellites with hybrid actuators configuration[J].Journal of Guidance Control and Dynamics, 2013, 36(2):532-547.
[14] Skelton C E, Hall C D. Mixed control moment gyro and momentum wheel attitude control strategies[J]. Astro dynamics, 2003, 116(1): 887-899.
[15] Hall C D, Tsiotras P, Shen H. Tracking rigid body motion using thrusters and momentum wheels[J]. The Journal of the Astronautical Sciences, 2002, 50(3): 311-323.
[16] Morten P T, Jan T G. Nonlinear attitude control of the micro satellite ESEO[C]//55th International Astronautical Congress. Vancouver, Canada, 2004: 1-12.
[17] 劉海穎, 王惠南, 陳志明, 等. 噴氣/偏置動量輪聯(lián)合微小衛(wèi)星三軸穩(wěn)定控制[J]. 系統(tǒng)仿真學(xué)報, 2010, 21(7):2023-2026.Liu H Y, Wang H N, Chen Z M, et al. Combined control for three-axis stabilization of micro-satellite using thrusters and single pitch bias momentum wheel[J]. Journal of System Simulation, 2010, 21(7): 2023-2026.
[18] Song G, Buck N V, Agrawal B N. Spacecraft vibration reduction using pulse-width pulse frequency modulated input shaper[J]. Journal of Guidance, Control and Dynamics, 1999, 22(4): 433-440.
[19] 鐘麗. 航天器姿態(tài)模糊 PD+姿態(tài)控制[D]. 北京: 北京理工大學(xué), 2015.Zhong L. Research on fuzzy PD+ control algorithm for spacecraft attitude[D]. Beijing: Beijing Institute of Technology, 2015.
[20] 胡雅博. 姿態(tài)角速度受限的微小衛(wèi)星姿態(tài)敏捷機(jī)動控制方法研究[D]. 南京: 南京航空航天大學(xué), 2016.Hu Y B. Attitude agile maneuver control for micro- satellite with attitude angular velocity constraint[D]. Nanjing:Nanjing University of Aeronautics and Astronautics, 2016.
[21] 張程. 飛輪控制小衛(wèi)星大角度姿態(tài)機(jī)動控制[D]. 哈爾濱: 哈爾濱工業(yè)大學(xué), 2012.Zhang C. The research on the control algorithms of large-angle maneuver of small wheel controlled satellite[D]. Harbin: Harbin Institute of Technology, 2012.
[22] Wie B, Weiss H, Arapostathis A. Quternion feedback regulator for spacecraft eigenaxis rotation[J]. Journal of Guidance, Control, and Dynamics, 1989, 12(3): 375-380.
[23] 秦鈺琦, 聞新. 衛(wèi)星姿態(tài)模糊 PID 控制的可視化仿真分析[J]. 科技創(chuàng)新導(dǎo)報, 2015(29): 55-58.Qin Y Q, Wen X. The study of visualized simulation for satellite attitude based on fuzzy control[J]. Science and Technology Innovation Herald, 2015(29): 55-58.
[24] 李珮冉, 聞新, 陳桃. 航天器飛輪姿控系統(tǒng)模型的模糊控制方法設(shè)計(jì)[J]. 工業(yè)控制計(jì)算機(jī), 2016, 29(9): 92-96.Li PR, Wen X, Chen T. Fuzzy control for spacecrafts attitude control system model based on momentum wheel[J]. Industrial Control Computer, 2016, 29(9). 92-96.
- 中國慣性技術(shù)學(xué)報的其它文章
- Modeling and analysis onoutput errors of precision linear vibration table
- 基于逆Gaussian過程的MEMS加速度計(jì)壽命融合預(yù)測方法
- 基于hp自適應(yīng)偽譜法的組合動運(yùn)載器發(fā)射窗口拓展能力分析
- 偏置比例導(dǎo)引末制導(dǎo)控制
- Effects of pump laser power and vapor cell temperature on SERF gyroscope
- 一種采用圓片級真空封裝的全硅MEMS三明治電容式加速度計(jì)