導(dǎo)管槳方位推進(jìn)器無空化噪聲數(shù)值預(yù)報(bào)研究
2018-01-29 06:59:12王永生易文彬蘇永生
船舶力學(xué) 2018年1期
劉 強(qiáng),王永生,易文彬,蘇永生
(海軍工程大學(xué) 動(dòng)力工程學(xué)院,武漢 430033)
0 引 言
導(dǎo)管槳方位推進(jìn)器是一種提供大推力且具有良好機(jī)動(dòng)性和操縱性的推進(jìn)器,被廣泛應(yīng)用于拖船、輔助測量船、鉆井平臺(tái)等[1-2]。導(dǎo)管槳方位推進(jìn)器通常工作在動(dòng)態(tài)定位環(huán)境中,其進(jìn)流條件不斷發(fā)生變化,易產(chǎn)生干擾船載水下勘探和水聲測量設(shè)備工作的噪聲[3]。因此準(zhǔn)確預(yù)報(bào)導(dǎo)管槳方位推進(jìn)器噪聲,尋找主要噪聲源并采取有效降噪措施,可為改善探測設(shè)備工作環(huán)境提供一個(gè)有效途徑。
推進(jìn)器水下輻射噪聲準(zhǔn)確預(yù)報(bào)的前提是推進(jìn)器水動(dòng)力性能的準(zhǔn)確模擬。國內(nèi)外很多學(xué)者對導(dǎo)管槳方位推進(jìn)器的水動(dòng)力性能展開了大量的研究工作。Funeno[4]采用不可壓粘性計(jì)算流體力學(xué)方法準(zhǔn)確模擬了導(dǎo)管槳方位推進(jìn)器的水動(dòng)力性能,并將計(jì)算結(jié)果同試驗(yàn)值進(jìn)行對比,驗(yàn)證了數(shù)值計(jì)算方法的準(zhǔn)確性,同時(shí)還研究了導(dǎo)管、螺旋槳、支架以及槳榖等相互作用對推進(jìn)器水動(dòng)力性能的影響。文獻(xiàn)[5]以拖船用導(dǎo)管槳方位推進(jìn)器為研究對象,采用計(jì)算流體力學(xué)方法對導(dǎo)管槳方位推進(jìn)器進(jìn)行了水力設(shè)計(jì),并討論了螺旋槳、導(dǎo)管和支柱等對推進(jìn)器水動(dòng)力性能的影響。Pacuraru等人[6]采用雷諾時(shí)均方法求解了導(dǎo)管槳方位推進(jìn)器的粘性流場,研究了螺旋槳、導(dǎo)管、支柱和齒輪箱等部件之間的相互作用。文獻(xiàn)[7-8]采用粒子圖像測速技術(shù)(PIV)分別對敞水條件下、位于平板下方、位于船底下方以及位于船首兩側(cè)等情況的導(dǎo)管槳方位推進(jìn)器尾流進(jìn)行測量,研究了推進(jìn)器的傾斜程度、平板和船底半徑對尾流特性的影響,為數(shù)值計(jì)算提供了驗(yàn)證材料。但是有關(guān)導(dǎo)管槳方位推進(jìn)器噪聲計(jì)算的文獻(xiàn)并不多見。
本文首先驗(yàn)證了聲學(xué)計(jì)算方法的有效性和準(zhǔn)確性。然后以非均勻進(jìn)流條件下導(dǎo)管槳方位推進(jìn)器為研究對象,計(jì)算了導(dǎo)管槳方位推進(jìn)器的穩(wěn)態(tài)和瞬態(tài)流場,得到導(dǎo)管槳方位推進(jìn)器壁面單元的脈動(dòng)壓力。在此基礎(chǔ)上采用扇聲源方法結(jié)合邊界元方法從頻域上對導(dǎo)管槳方位推進(jìn)器無空化噪聲進(jìn)行數(shù)值預(yù)報(bào)。最后研究了導(dǎo)管槳方位推進(jìn)器不同部件噪聲對總噪聲的貢獻(xiàn)。
1 聲學(xué)計(jì)算方法驗(yàn)證
本文采用的聲學(xué)計(jì)算方法分為靜止聲源噪聲預(yù)報(bào)方法和旋轉(zhuǎn)聲源噪聲預(yù)報(bào)方法。靜止聲源噪聲預(yù)報(bào)方法是以靜止物體表面偶極子的噪聲源強(qiáng)度為邊界條件,采用基于聲相似理論的邊界元方法在頻域內(nèi)數(shù)值求解聲學(xué)方程,從而得到空間內(nèi)任意一點(diǎn)的聲壓。由于邊界元方法較為成熟且應(yīng)用廣泛,故在此不作詳述。旋轉(zhuǎn)聲源噪聲預(yù)報(bào)方法是在扇聲源方法求解運(yùn)動(dòng)物體表面旋轉(zhuǎn)偶極子噪聲源強(qiáng)度的基礎(chǔ)上結(jié)合邊界元方法求解空間內(nèi)任意一點(diǎn)的聲壓。該方法的基本步驟是首先將運(yùn)動(dòng)物體壁面的噪聲源強(qiáng)度通過數(shù)據(jù)轉(zhuǎn)移得到每一個(gè)部分壁面的噪聲源強(qiáng)度;然后采用扇聲源方法將每一個(gè)部分的力源等效為若干個(gè)旋轉(zhuǎn)偶極子;最后以旋轉(zhuǎn)偶極子作為邊界條件采用邊界元方法分別計(jì)算每一個(gè)部分產(chǎn)生的噪聲后將結(jié)果進(jìn)行復(fù)數(shù)疊加,得到運(yùn)動(dòng)物體產(chǎn)生的總聲場。
為了校驗(yàn)上述噪聲預(yù)報(bào)方法的計(jì)算精度,以一個(gè)均勻進(jìn)流條件下四葉螺旋槳(E779A)負(fù)載噪聲的計(jì)算模型作為驗(yàn)證對象。參照文獻(xiàn)[10]的試驗(yàn)條件,采用六面體結(jié)構(gòu)化網(wǎng)格對螺旋槳及計(jì)算域進(jìn)行離散,計(jì)算域進(jìn)流面設(shè)置為速度進(jìn)口,出流面設(shè)置為壓力出口,控制體外邊界設(shè)置為開放邊界。設(shè)置螺旋槳轉(zhuǎn)速為707.3 rpm,采用SST湍流模型求得不同進(jìn)速系數(shù)(0.3-1.2)下的推力系數(shù)KT和力矩系數(shù)KQ,如圖1所示。由圖1可知,在較大的進(jìn)速系數(shù)范圍內(nèi)推力系數(shù)和力矩系數(shù)都與試驗(yàn)值吻合較好,推力系數(shù)最大誤差為3.5%,力矩系數(shù)最大誤差為3.7%,從而說明流場數(shù)值計(jì)算方法的準(zhǔn)確性。
為了與文獻(xiàn)值進(jìn)行比較,將該槳設(shè)定為同文獻(xiàn)[11]相同的工作條件:來流速度為8.395 m/s,進(jìn)速系數(shù)為0.88,螺旋槳轉(zhuǎn)速為2 518.5 r/min。在計(jì)算得到螺旋槳在該工作條件下的穩(wěn)態(tài)流場后,采用分離渦(DES)方法對螺旋槳進(jìn)行瞬態(tài)流場計(jì)算,每個(gè)時(shí)間步長槳葉轉(zhuǎn)動(dòng)3°。待槳葉穩(wěn)定旋轉(zhuǎn)10圈后,提取最后一圈槳葉表面的脈動(dòng)壓力,采用扇聲源方法結(jié)合邊界元方法計(jì)算了螺旋槳的負(fù)載噪聲(徑向測點(diǎn)),并與文獻(xiàn)值進(jìn)行比較,如圖2所示。由圖2可知,采用扇聲源方法結(jié)合邊界元方法得到的計(jì)算結(jié)果與文獻(xiàn)值吻合較好,尤其是在葉頻(167 Hz)。由此驗(yàn)證了旋轉(zhuǎn)聲源噪聲預(yù)報(bào)方法的有效性和準(zhǔn)確性。
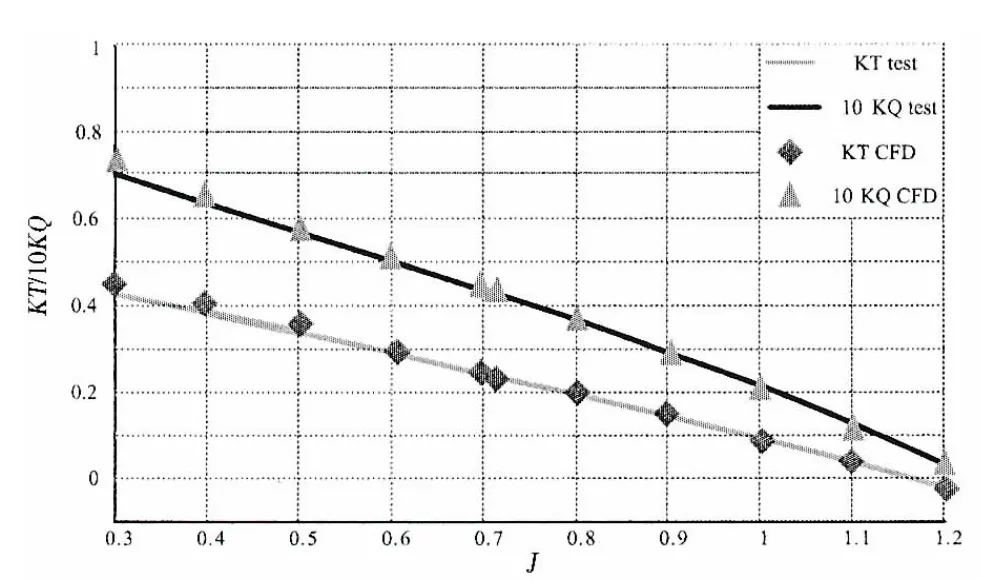
圖1 螺旋槳敞水性能曲線Fig.1 Open water performance curves of propeller
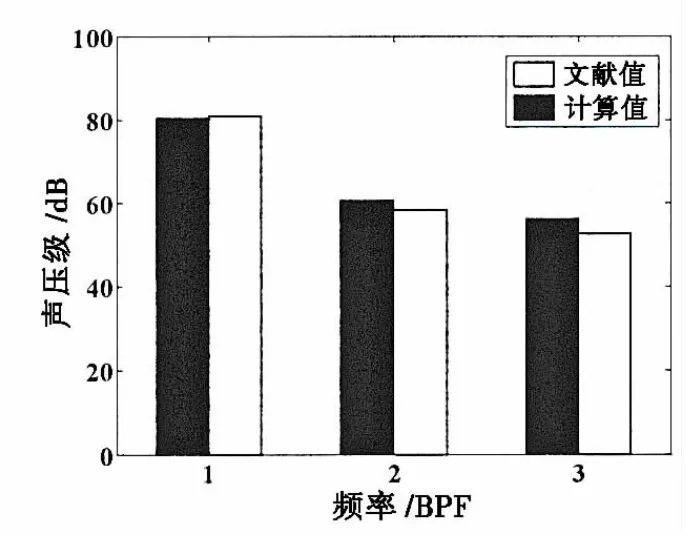
圖2 螺旋槳負(fù)載噪聲計(jì)算結(jié)果對比Fig.2 Comparison of loading noise of propeller
2 導(dǎo)管槳方位推進(jìn)器流場數(shù)值計(jì)算與分析
2.1 流場數(shù)值計(jì)算模型
本文的研究對象為位于船體下方的導(dǎo)管槳方位推進(jìn)器,其中螺旋槳直徑D=1.65 m,槳葉數(shù)為4,螺距比為1.2。流場計(jì)算域相關(guān)參數(shù)如圖3所示,進(jìn)口邊界距船艏為L(L為船長);出口邊界距船艉為2L;側(cè)邊界距船側(cè)為1.5L;下邊界距船底為1.5L。采用四面體網(wǎng)格和六面體網(wǎng)格相結(jié)合的劃分方式對船體和導(dǎo)管槳方位推進(jìn)器組成的系統(tǒng)進(jìn)行空間離散,其中船體和推進(jìn)器組成的內(nèi)域采用非結(jié)構(gòu)化四面體網(wǎng)格離散,外域采用全結(jié)構(gòu)化六面體網(wǎng)格離散,整個(gè)流場計(jì)算域網(wǎng)格節(jié)點(diǎn)數(shù)為1 464萬。在設(shè)置計(jì)算域邊界條件時(shí)進(jìn)流面采用速度進(jìn)口,出流面采用壓力出口。來流速度為6 knots,螺旋槳轉(zhuǎn)速為316 r/min。
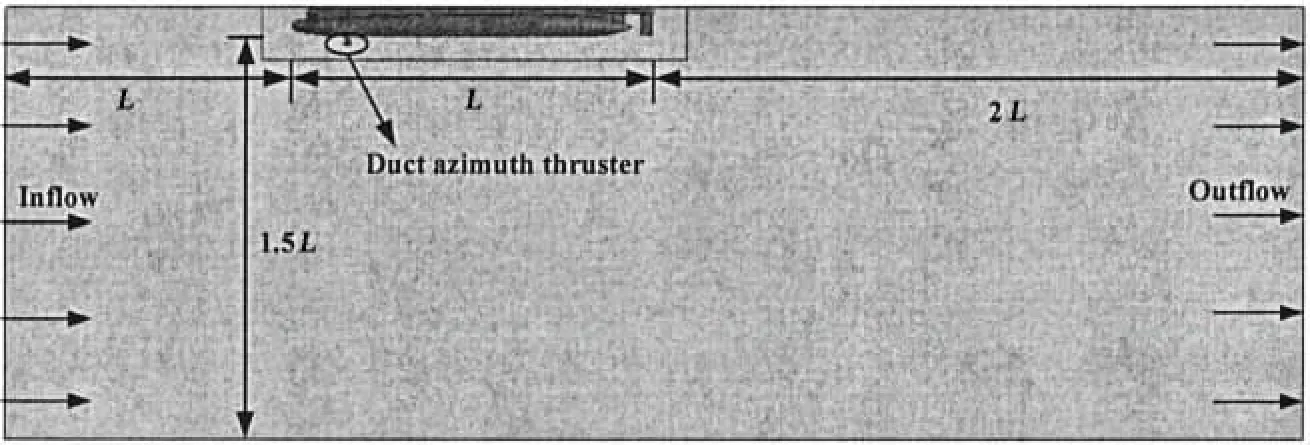
圖3 流場計(jì)算域及邊界條件設(shè)置Fig.3 Calculation domain and boundary condition
2.2 瞬態(tài)流場計(jì)算
在計(jì)算導(dǎo)管槳方位推進(jìn)器瞬態(tài)流場之前,首先采用與第1節(jié)相同的流場數(shù)值計(jì)算方法對船體和導(dǎo)管槳方位推進(jìn)器組成的系統(tǒng)進(jìn)行穩(wěn)態(tài)流場計(jì)算。在得到該系統(tǒng)在自航點(diǎn)處的相關(guān)流場參數(shù)后,以穩(wěn)態(tài)流場計(jì)算結(jié)果為初值,采用分離渦模擬(DES)計(jì)算該系統(tǒng)的瞬態(tài)流動(dòng)特性,計(jì)算時(shí)間步長設(shè)定為螺旋槳旋轉(zhuǎn)0.8°所需時(shí)間即為422 μs,有效分析頻率為1 185 Hz。在計(jì)算瞬態(tài)流場時(shí)進(jìn)口設(shè)定為速度邊界條件;出口設(shè)定為壓力邊界條件;螺旋槳與導(dǎo)管的動(dòng)靜耦合選用滑移網(wǎng)格(Sliding mesh)模型。
瞬態(tài)流場計(jì)算時(shí)在導(dǎo)管槳槳葉與支柱之間布置了3個(gè)監(jiān)控點(diǎn),如圖4(a)所示。待瞬態(tài)流場計(jì)算穩(wěn)定后,提取最后一圈導(dǎo)管槳方位推進(jìn)器表面的脈動(dòng)壓力進(jìn)行噪聲計(jì)算。圖4(b)和(c)分別為不同監(jiān)控點(diǎn)的脈動(dòng)壓力時(shí)域曲線和頻域曲線。由圖4可知,脈動(dòng)流場已基本穩(wěn)定,滿足聲場計(jì)算要求。在時(shí)域上一個(gè)周期內(nèi)監(jiān)控點(diǎn)的脈動(dòng)壓力呈現(xiàn)4個(gè)峰值;在頻域上脈動(dòng)壓力的主要峰值頻率點(diǎn)在葉頻及其諧頻,且由葉根到葉梢監(jiān)控點(diǎn)A、B和C脈動(dòng)壓力幅值逐漸增大,符合研究對象的基本物理規(guī)律。
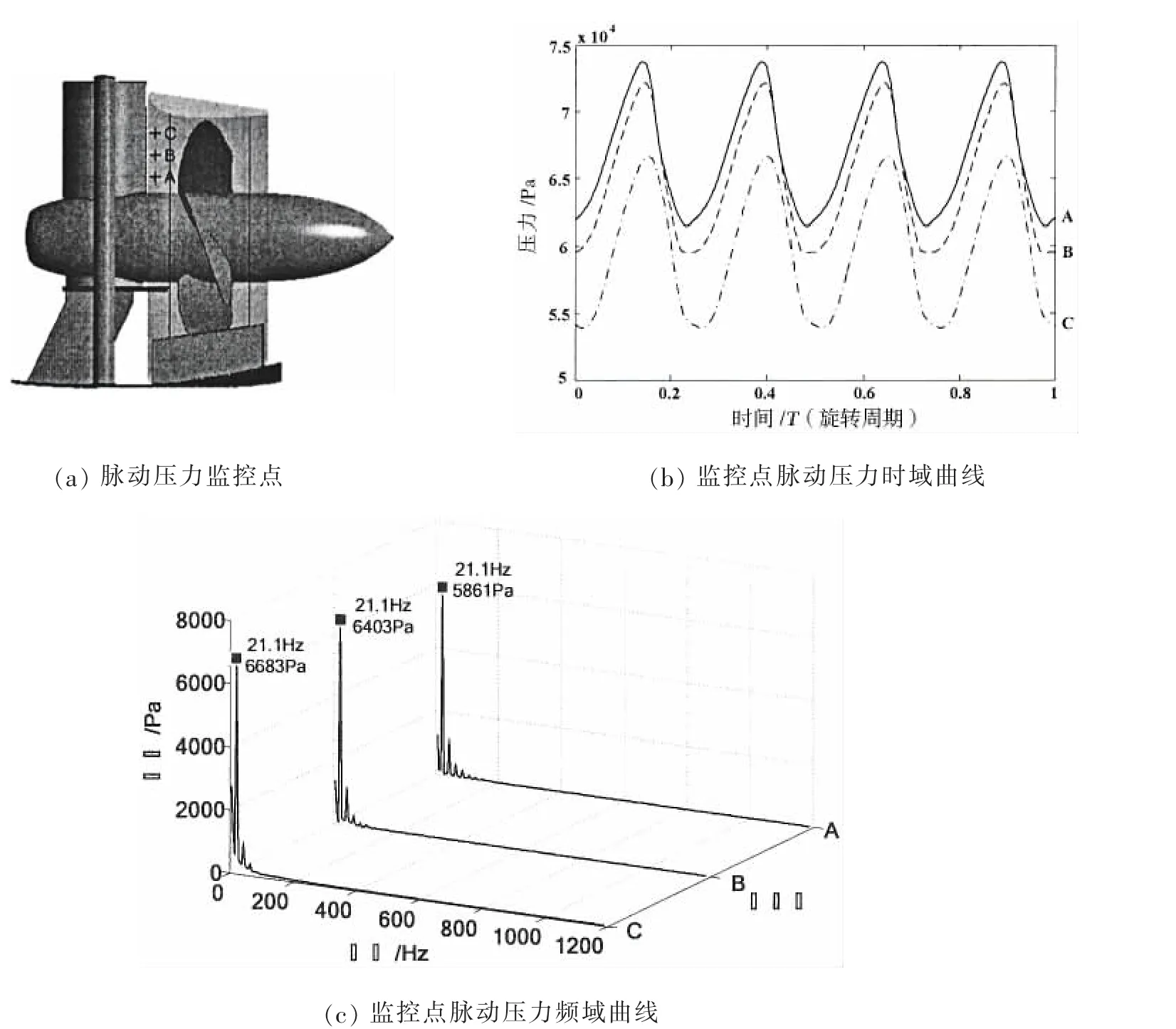
圖4 監(jiān)控點(diǎn)脈動(dòng)壓力Fig.4 Pressure fluctuations on the monitoring points
3 導(dǎo)管槳方位推進(jìn)器無空化噪聲計(jì)算與分析
3.1 噪聲源強(qiáng)度計(jì)算與分析
在聲場計(jì)算之前,需要將瞬態(tài)流場計(jì)算結(jié)果通過數(shù)據(jù)映射由流場網(wǎng)格轉(zhuǎn)移到聲學(xué)網(wǎng)格上。為了保證聲學(xué)網(wǎng)格法向方向全部指向流體域,同時(shí)保證數(shù)據(jù)映射的完整性和準(zhǔn)確性,根據(jù)導(dǎo)管槳方位推進(jìn)器幾何劃分聲學(xué)網(wǎng)格,通過距離加權(quán)平均算法,將流場節(jié)點(diǎn)的脈動(dòng)壓力映射到聲學(xué)網(wǎng)格節(jié)點(diǎn)上。在此基礎(chǔ)上通過快速傅里葉變換(FFT)將導(dǎo)管槳方位推進(jìn)器壁面聲學(xué)網(wǎng)格節(jié)點(diǎn)上的時(shí)域脈動(dòng)壓力變換到頻域,以此作為聲源進(jìn)行導(dǎo)管槳方位推進(jìn)器無空化噪聲的計(jì)算。圖5為導(dǎo)管槳方位推進(jìn)器的噪聲源強(qiáng)度分布(以葉頻及其諧頻為例)。由圖5可知,導(dǎo)管槳方位推進(jìn)器噪聲源強(qiáng)度從葉頻(Blade Passing F-requency,BPF)到四倍葉頻依次下降,壁面脈動(dòng)壓力幅值最強(qiáng)位置主要集中在槳葉的導(dǎo)邊以及導(dǎo)管內(nèi)壁面靠近槳葉葉梢的部分。在葉頻處脈動(dòng)壓力較強(qiáng)區(qū)域主要在槳葉前方的導(dǎo)管內(nèi)壁面上,在槳葉的導(dǎo)邊上也有較高的噪聲源強(qiáng)度。在諧頻(2BPF、3BPF和4BPF)處脈動(dòng)壓力較強(qiáng)區(qū)域主要在槳葉的導(dǎo)邊上。
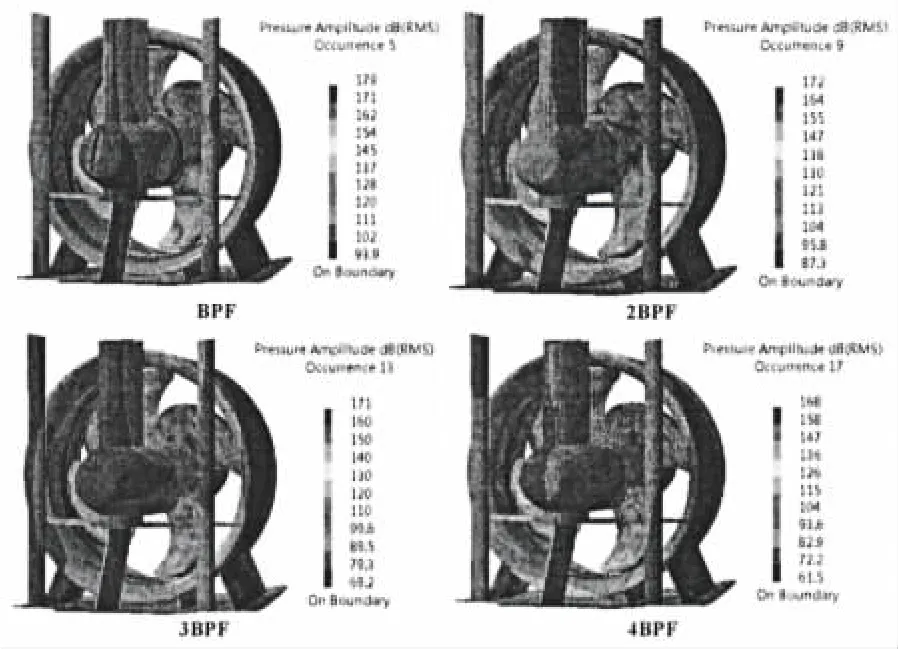
圖5 噪聲源強(qiáng)度分布Fig.5 Distribution of acoustic source intensity
3.2 靜止部件噪聲計(jì)算
由于導(dǎo)管槳方位推進(jìn)器既有旋轉(zhuǎn)的螺旋槳也有導(dǎo)管、支架等靜止部件,故在計(jì)算導(dǎo)管槳方位推進(jìn)器噪聲時(shí)將旋轉(zhuǎn)部件噪聲和靜止部件噪聲分開計(jì)算,然后將兩部分聲場結(jié)果疊加得到總聲場。圖6為導(dǎo)管槳方位推進(jìn)器不同部件的幾何,其中旋轉(zhuǎn)部件主要是槳葉和與之相連的槳轂,靜止部件主要是導(dǎo)管、槳轂(不旋轉(zhuǎn))、支柱、支架等。
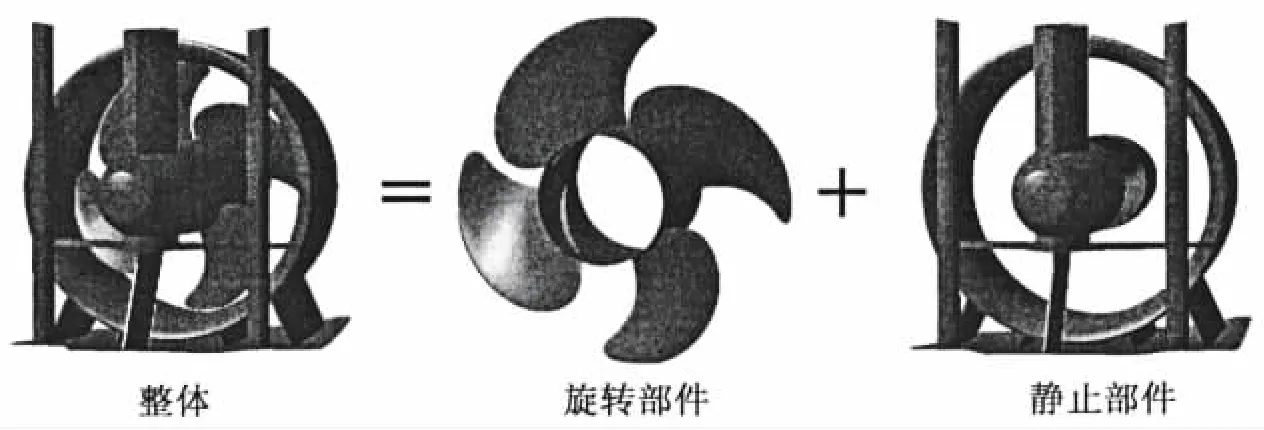
圖6 不同部件幾何示意圖Fig.6 Sketch of geometry corresponding to different parts
在計(jì)算導(dǎo)管槳方位推進(jìn)器噪聲時(shí)測點(diǎn)布置在水平方向360°范圍內(nèi),距導(dǎo)管槳方位推進(jìn)器中心50 m,測點(diǎn)之間間隔為3°,總共布置了120個(gè)測點(diǎn)(如圖7所示)。因測點(diǎn)距導(dǎo)管槳方位推進(jìn)器的距離遠(yuǎn)大于導(dǎo)管槳方位推進(jìn)器的尺寸,故假設(shè)導(dǎo)管槳方位推進(jìn)器的等效聲源中心與導(dǎo)管槳方位推進(jìn)器的幾何中心重合。在計(jì)算測點(diǎn)聲源級(jí)時(shí),根據(jù)遠(yuǎn)場計(jì)算結(jié)果采用球面波衰減規(guī)律進(jìn)行距離修正,得到距等效聲源中心1 m處的聲源級(jí)[12]。
圖8(a)為采用邊界元方法計(jì)算得到了導(dǎo)管槳方位推進(jìn)器靜止部件右舷徑向測點(diǎn)在1 000 Hz以內(nèi)的聲源級(jí)頻譜曲線。由圖8(a)可知,徑向測點(diǎn)聲源級(jí)最大值對應(yīng)的頻率為葉頻,線譜主要集中在200 Hz以內(nèi),200-1 000 Hz的噪聲對寬帶聲源級(jí)貢獻(xiàn)很小。由3.1節(jié)的分析可知,在葉頻處脈動(dòng)壓力較強(qiáng)區(qū)域主要在導(dǎo)管內(nèi)壁面上,對應(yīng)的壁面脈動(dòng)力主要在徑向,這與圖8(a)中的噪聲結(jié)果相對應(yīng)。圖8(b)為靜止部件在水平方向360°范圍內(nèi)不同測點(diǎn)的寬帶聲源級(jí)指向性。由圖8(b)可以看出,靜止部件的指向性呈現(xiàn)8字形分布,且在徑向測點(diǎn)總聲級(jí)最大。
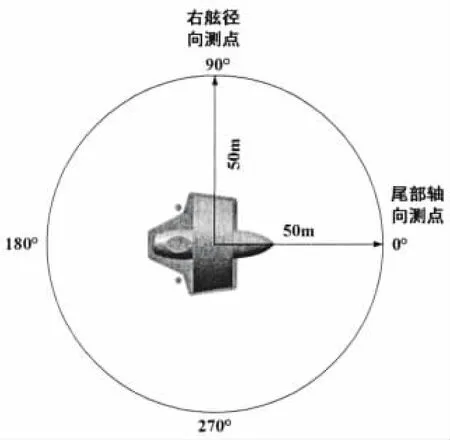
圖7 測點(diǎn)布置示意圖Fig.7 Sketch of field point collocation
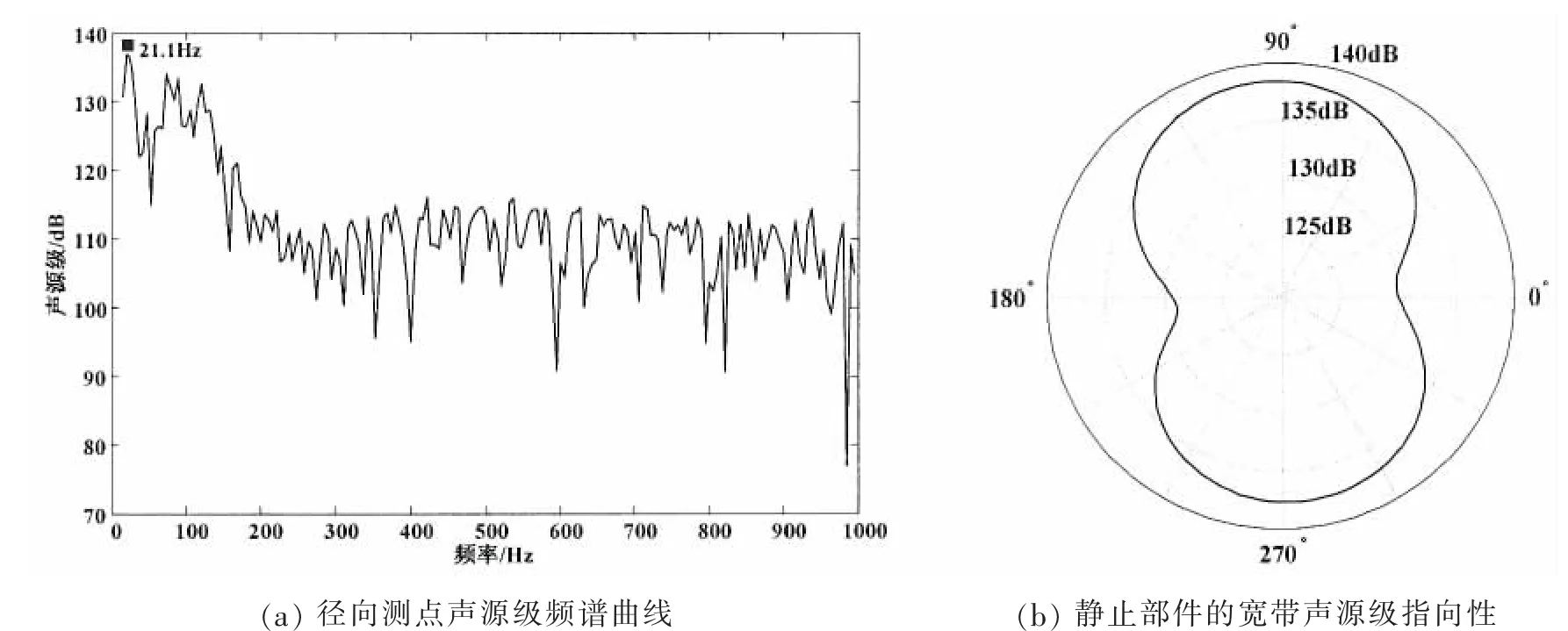
圖8 導(dǎo)管槳方位推進(jìn)器靜止部件噪聲Fig.8 Stationary component noise of duct azimuth thruster
3.3 旋轉(zhuǎn)部件噪聲計(jì)算
在采用扇聲源方法結(jié)合邊界元方法計(jì)算導(dǎo)管槳方位推進(jìn)器旋轉(zhuǎn)部件噪聲時(shí),需要將旋轉(zhuǎn)部件模型看作是四個(gè)獨(dú)立的單個(gè)葉片模型。按照旋轉(zhuǎn)聲源噪聲計(jì)算思路,首先將旋轉(zhuǎn)部件的噪聲源強(qiáng)度通過數(shù)據(jù)轉(zhuǎn)移得到每一個(gè)葉片的噪聲源強(qiáng)度。然后采用扇聲源方法將每一個(gè)葉片上的力源等效為若干個(gè)旋轉(zhuǎn)偶極子(如圖9所示)。最后以旋轉(zhuǎn)偶極子作為邊界條件,同時(shí)考慮靜止部件的聲反射及散射作用,分別計(jì)算每一個(gè)葉片產(chǎn)生的噪聲后將結(jié)果進(jìn)行復(fù)數(shù)疊加,得到旋轉(zhuǎn)部件的總聲場。在采用扇聲源方法時(shí)需要注意坐標(biāo)系的Z方向指向旋轉(zhuǎn)軸所在的軸線,X方向表示葉片的徑向方向(旋轉(zhuǎn)中心指向葉片幾何中心的方向),因此對每一個(gè)葉片分別建立局部坐標(biāo)系,以滿足不同葉片之間的相位關(guān)系。
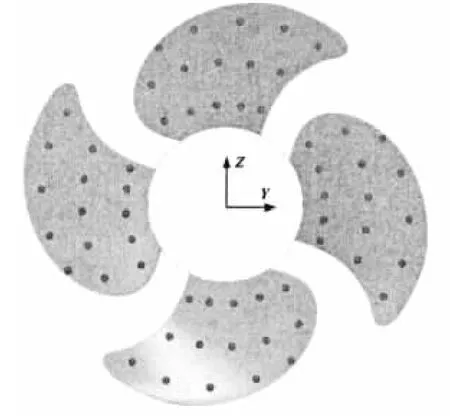
圖9 等效旋轉(zhuǎn)偶極子示意圖Fig.9 Sketch of rotating equivalent dipole
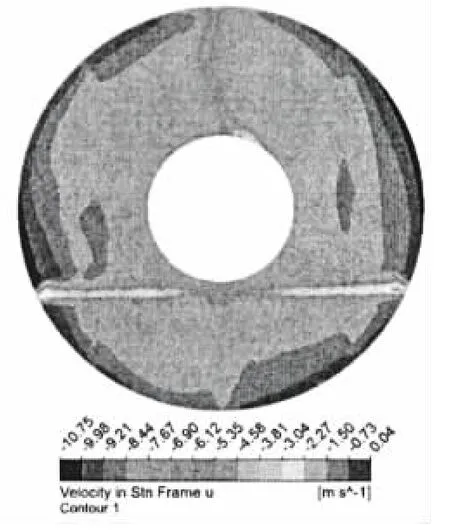
圖10 螺旋槳前方進(jìn)流面的速度分布Fig.10 Velocity distribution at the inflow plane before propeller
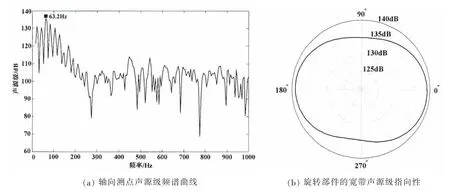
圖11導(dǎo)管槳方位推進(jìn)器旋轉(zhuǎn)部件噪聲Fig.11 Rotating component noise of duct azimuth thruster
圖11 (a)為采用扇聲源方法結(jié)合邊界元方法計(jì)算得到的導(dǎo)管槳方位推進(jìn)器旋轉(zhuǎn)部件尾部軸向測點(diǎn)在1 000 Hz以內(nèi)的聲源級(jí)頻譜曲線。由圖11(a)可知,軸向測點(diǎn)噪聲在葉頻及其諧頻處存在線譜,且在三倍葉頻處聲源級(jí)最大,在200-1 000 Hz頻率范圍內(nèi)的噪聲對寬帶聲源級(jí)貢獻(xiàn)很小。這可能是由于導(dǎo)管槳方位推進(jìn)器具有水平支架和豎直支柱,并且支架下方的支柱距導(dǎo)管槳距離稍遠(yuǎn)影響較弱,使得導(dǎo)管槳的軸向進(jìn)流出現(xiàn)三個(gè)低速區(qū)(如圖10所示),因此軸向測點(diǎn)噪聲在三倍葉頻處最大。圖11(b)為旋轉(zhuǎn)部件在水平方向360°范圍內(nèi)不同測點(diǎn)的寬帶聲源級(jí)指向性。由圖11(b)可以看出,與傳統(tǒng)螺旋槳的8字形指向性不同,旋轉(zhuǎn)部件的指向性呈現(xiàn)斜橢圓形分布,這是由于非均勻流場中螺旋槳的旋轉(zhuǎn)效應(yīng)以及螺旋槳存在一定側(cè)斜引起的。
3.4 總噪聲計(jì)算與主要噪聲源分析
導(dǎo)管槳方位推進(jìn)器的總噪聲是靜止部件噪聲和旋轉(zhuǎn)部件噪聲的合成。在得到靜止部件和旋轉(zhuǎn)部件測點(diǎn)聲壓的基礎(chǔ)上,對同一測點(diǎn)上的聲壓進(jìn)行復(fù)數(shù)疊加,即得到該測點(diǎn)的導(dǎo)管槳方位推進(jìn)器總噪聲。圖12為導(dǎo)管槳方位推進(jìn)器總噪聲對應(yīng)的寬帶聲源級(jí)指向性。該指向性呈現(xiàn)橢圓形,且徑向測點(diǎn)的聲源級(jí)比軸向測點(diǎn)略大。
為進(jìn)一步分析不同部件噪聲對總噪聲的貢獻(xiàn)量,以確定主要噪聲源,比較了不同部件噪聲對應(yīng)的寬帶聲源級(jí)指向性,如圖13所示。由圖可知,旋轉(zhuǎn)部件噪聲(主要來源于槳葉導(dǎo)邊的脈動(dòng)壓力)是軸向測點(diǎn)噪聲的主要貢獻(xiàn)者,靜止部件噪聲(主要來源于導(dǎo)管內(nèi)壁面的脈動(dòng)壓力)是徑向測點(diǎn)噪聲的主要貢獻(xiàn)者。對于旋轉(zhuǎn)部件而言,其軸向推力占主要成分,使得旋轉(zhuǎn)部件對應(yīng)的聲場在軸向測點(diǎn)較大。但由于螺旋槳存在一定的側(cè)斜,使其產(chǎn)生一定的徑向力,因此旋轉(zhuǎn)部件對徑向測點(diǎn)噪聲的貢獻(xiàn)不可忽略。由噪聲源強(qiáng)度分析可知,導(dǎo)管內(nèi)壁面與螺旋槳相互作用區(qū)域脈動(dòng)壓力較強(qiáng),其對應(yīng)的壁面脈動(dòng)力主要在徑向,使得靜止部件對應(yīng)的聲場在徑向測點(diǎn)較大。因此本研究的導(dǎo)管槳方位推進(jìn)器總噪聲在徑向測點(diǎn)的聲源級(jí)要比軸向測點(diǎn)略大。
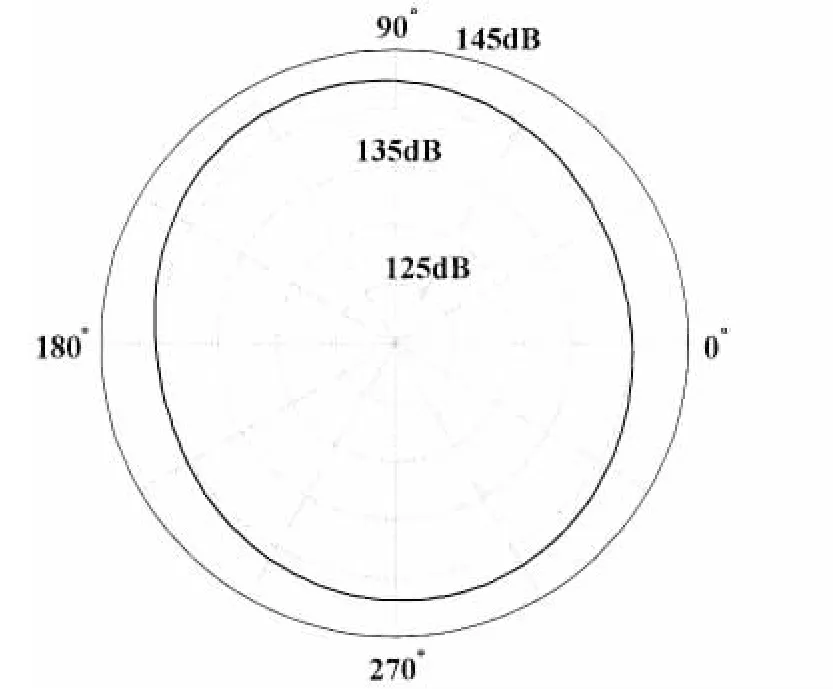
圖12 總噪聲的寬帶聲源級(jí)指向性Fig.12 Directivity of wide band sound source level of total noise
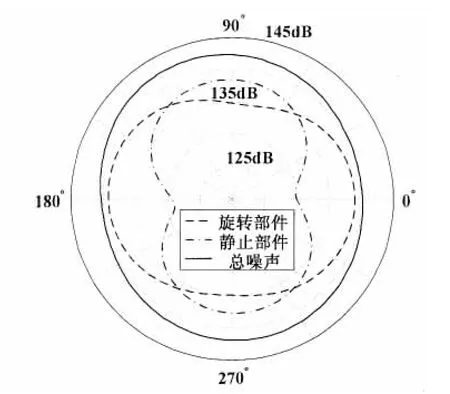
圖13 不同部件噪聲的寬帶聲源級(jí)指向性Fig.13 Directivity of wide band sound source level corresponding to different parts
4 結(jié) 論
本文以非均勻進(jìn)流條件下導(dǎo)管槳方位推進(jìn)器為研究對象,借助Virtual Lab軟件平臺(tái),采用扇聲源方法結(jié)合邊界元方法對導(dǎo)管槳方位推進(jìn)器無空化噪聲進(jìn)行了數(shù)值預(yù)報(bào),研究了導(dǎo)管槳方位推進(jìn)器不同部件噪聲對總噪聲的貢獻(xiàn),從計(jì)算結(jié)果分析可以得到如下結(jié)論:
(1)采用扇聲源方法結(jié)合邊界元方法能夠預(yù)報(bào)導(dǎo)管槳方位推進(jìn)器無空化噪聲,為導(dǎo)管槳方位推進(jìn)器的噪聲性能評(píng)估提供一個(gè)新方法。
(2)在葉頻處脈動(dòng)壓力較強(qiáng)區(qū)域主要在槳葉前方的導(dǎo)管內(nèi)壁面上,在槳葉的導(dǎo)邊上也有較高的噪聲源強(qiáng)度;在諧頻處脈動(dòng)壓力較強(qiáng)區(qū)域主要在槳葉的導(dǎo)邊上。
(3)徑向測點(diǎn)聲源級(jí)最大值對應(yīng)的頻率為葉頻,線譜主要集中在低頻;軸向測點(diǎn)噪聲在葉頻及其諧頻處存在線譜,且在三倍葉頻處聲源級(jí)最大,這是由于豎直支柱和水平支架使導(dǎo)管槳進(jìn)流產(chǎn)生三個(gè)低速區(qū)引起的。
(4)靜止部件噪聲是徑向測點(diǎn)噪聲的主要貢獻(xiàn)者,旋轉(zhuǎn)部件噪聲是軸向測點(diǎn)噪聲的主要貢獻(xiàn)者。
(5)靜止部件噪聲和旋轉(zhuǎn)部件噪聲合成后的導(dǎo)管槳方位推進(jìn)器總噪聲對應(yīng)的寬帶聲源級(jí)指向性呈橢圓形。
[1]Marintek K K.Dynamics of propeller blade and duct loading on ventilated thrusters in dynamic positioning mode[C]//Dynamic Positioning Conference.Houston,USA,2007.
[2]Igeta M,Yuan H B.Development and performance estimates of a ducted tandem CRP[C]//Third International Symposium on Marine Propolsors.Tasmania,Australia,2013.
[3]Fisher R.Bow thruster induced noise and vibration[C]//Dynamic Positioning Conference.Houston,USA,2000.
[4]Funeno I.Hydrodynamic optimal design of ducted azimuth thrusters[C]//First International Symposium on Marine Propulsors.Trondheim,Norway,2009.
[5]Park J H,Chung K N,Chang B J,et al.A study of hydraulic design of a ducted azimuth thruster[C]//Proceedings of the ASME 2012 Fluids Engineering Summer Meeting.Rio Grande,Puerto Rico,2012.
[6]Pacuraru F,Lungu A,Ungureanu C,et al.Numerical simulation of the flow around a steerable propulsion unit[C]//25th IAHR Symposium on Hydraulic Machinery and Systems.Timisoara,Romania,2010.
[7]Cozijn J L,Hallmann R.The wake flow behind azimuthing thrusters:measurements in open water,under a plate and under a barge[C]//Proceedings of the ASME 2012 31st International Conference on Ocean,Offshore and Arctic Engineering.Rio de Janeiro,Brazil,2012.
[8]Cozijn J L,Hallmann R.Thruster-interaction effects on a dp shuttle tanker-wake flow measurements of the main propeller and bow tunnel thrusters[C]//Proceedings of the ASME 2014 33rd International Conference on Ocean,Offshore and Arctic Engineering.San Francisco,California,USA,2014.
[9]Choi H L,Duck J L.Development of the numerical method for calculating sound radiation from a rotating dipole source in an opened thin duct[J].Journal of Sound and Vibration,2006(295):739-752.
[10]Vaz G.Modelling of sheet cavitation on hydrofoils and marine propellers using boundary element methods[D].Portugal:Universidade Tecnica de Lisboa,2005.
[11]付 建,王永生.基于點(diǎn)源模型的螺旋槳負(fù)載噪聲頻域預(yù)報(bào)[J].華中科技大學(xué)學(xué)報(bào)(自然科學(xué)版),2014,42(4):77-80.Fu Jian,Wang Yongsheng.Predicting the loading noise of propeller based on point source model in frequency domain[J].J Huazhong Univ.of Sci.&Tech.(Natural Science Edition),2014,42(4):77-80.
[12]王之程,陳宗岐,于 渢,等.艦船噪聲測量與分析[M].北京:國防工業(yè)出版社,2004.
