一種大型緊縮場極坐標測試掃描架系統的設計與實現
2018-01-30 07:06:33吳翔何鑫寇鵬任濤
宇航計測技術 2017年5期
關鍵詞:設計
吳翔 何鑫 寇鵬 任濤
(北京無線電計量測試研究所,北京 100039)
1引言
緊縮場是以反射面原理構成的、縮短了測試距離的天線測試場,采用一個、兩個或更多的反射面將饋源輻射的球面波在較近距離上變換為平面波。掃描架是用于測量緊縮場微波或毫米波平面度的專用設備。而緊縮場面臨的一個關鍵技術問題是其性能的檢測,這就需要高精度的掃描架,而在具有大尺寸靜區的大型緊縮場測量中,這一問題更為突出[1]。
北京航空航天大學樊銳等研制過直徑4500mm、中心高7100mm的掃描架[2],調整后平面度可達0.08mm,直線度0.05mm,該掃描架只能在靜區中心高度約7m,靜區截面約5m的緊縮場檢測使用,適應性較差。北京林業大學張厚江和北京航空航天大學樊銳等人在2005年研制了一種高精度直角坐標掃描架[3],行程為2000mm×2000mm,來波方向平面度在補償后達到0.04mm。中航工業北京長城計量測試技術研究所曹鐵澤等人在2015年研制了一種基于圓柱筒支撐的緊縮場極坐標測試掃描系統[4],掃描直徑達到3500mm,最大中心高可達8m,帶有來波方向的激光平面補償裝置,補償后平面度達到0.04mm,該掃描架為提高剛性采用了主極化軸不完全旋轉的方式。
以上掃描架平面度補償均采用半實時的方式,北京航空航天大學樊銳等先將各測試點補償值預存于系統中[3],測試中在天線到達測試點時利用微調機構進行補償,缺點是預存的數據在設備反復拆裝后不能一直保證準確性;北京長城計量測試技術研究所曹鐵澤等通過分別測試掃描架各測試點的位置偏差和微波信號數據得到補償量[4],待測試完成后通過軟件方法進行補償,缺點在于補償結果為二次處理,現場計量校準時效率較低、便利性較差,且因將激光發射器安裝于設備本體上,不能保證激光掃描平面與緊縮場靜區的相對位置保持不變。
此外,還有一個普遍的需求是在緊縮場測試中需要測量多個截面,意味著掃描架需要具有前后位置平移的功能。綜上,在緊縮場測試的領域內暫時還沒有能夠實現大承載能力、大范圍、高精度、可移動的現場掃描架測試系統。
2 大型緊縮場極坐標掃描架系統設計
2.1 總體設計
為實現對國內現有多數緊縮場進行現場計量校準,結合上述現有研究存在的問題,需要設計一種具有大掃描范圍、高精度(實現可達0.05mm的平面度掃描)、多種安裝方式、具有平面度補償,同時便于儲運和安裝的掃描架系統。為此,本文設計了一種大尺寸的模塊化掃描架系統,具備直線掃描機構、主極化掃描機構(直線掃描機構整體旋轉)、天線極化掃描機構、天線進給補償機構、方位調整機構、俯仰調整機構、組合式安裝支撐系統、液壓調平裝置、整體平移機構、激光平面補償裝置,掃描架系統整體效果如圖1所示。
為實現0.05mm的平面度掃描需求,僅靠結構優化設計提高剛性和機械加工裝調提高精度是不足以完全保證的,尤其是極坐標旋轉這樣的變載荷工況下運行的掃描架,因此在天線安裝法蘭面上固定激光平面儀靶標組件,將其作為位置反饋是保證平面度的一種有效方法。在該掃描架中靶標組件上呈90°安裝兩個激光靶標,使得主極化旋轉過程中至少一個靶標的激光感應面處于激光發生器的有效感應范圍內。平面度測量設備的工作原理如下:固定于專用高精度支架的激光發生器旋轉產生一個激光平面,位于掃描架上的靶標接收到激光后通過光學成像系統實時檢測其偏移量,并將偏移量反饋至控制系統,控制系統根據反饋值控制進給補償模塊運動,從而實現平面度實時補償,如圖2所示。
由于掃描架采用半徑式極坐標掃描形式,其直線掃描機構位于旋轉軸心的一側,并且由于大尺寸和高精度造成重量較大,會對支柱產生較大的傾覆力矩,同時傾覆力矩會隨其旋轉而變化,引起支柱的變形而增大測量誤差,因此在直線掃描機構對稱位置布置一個配重調整機構進行配重以消除傾覆力矩,同時可提高安全性。
掃描架支撐結構主要由主支撐標準節及輔助支撐節組成,用于對上述所有設備提供穩定的結構支撐,以使其完成所需的運動,對掃描架系統的安裝和使用便利性起決定性作用。掃描架系統可實現的典型安裝模式如圖3所示。
2.2 各功能模塊設計
天線部件在結構上采用一體化設計,主要完成直線運動、天線極化旋轉以及天線(含靶標)的進給補償運動,是掃描架系統的關鍵運動組件,如圖4所示。天線極化模塊作為天線的承載結構和驅動單元位于該組件的結構及運動末端,通過天線極化轉臺的殼體安裝在天線極化模塊法蘭上。
天線極化模塊由轉臺殼體、蝸輪蝸桿副、旋轉軸系、圓光柵、蝸桿軸系、同步帶組件、行星減速機和交流伺服電機組成,如圖5所示。主軸采用法蘭型精密交叉滾子軸承作為支撐,以最大限度減少軸向尺寸同時不降低軸向及徑向剛度,驅動副采用變導程消隙蝸輪蝸桿傳動降低反向間隙,解決末端傳動間隙給整個傳動系統精度帶來的影響。為降低該模塊在來波方向的投影面積,充分利用蝸桿鏡像位置的空間,采用同步帶傳動作為換向機構,使電機及行星減速機可安裝在轉臺殼體投影面內。
天線(含靶標)進給補償模塊主要由滾珠絲杠副、導軌滑塊組件、進給作用桶、安裝固定桶、同步帶組件、驅動電機減速機組件以及附件等組成。在功能上主要是與平面度測量設備及控制設備一同完成天線平面的平面度補償動作,結構形式如圖6所示。
直線運動模塊由運動滑塊組件及支撐框架等組成,其中支撐框架為運動部件提供結構支撐、運動副所需的直線導軌安裝平面以及主旋轉運動所需安裝法蘭,其加工和裝配精度和剛性決定了直線運動中的直線度指標。由于安裝空間的限制,選用消隙圓柱滾子齒圈齒條作為驅動執行機構,該驅動副橫截面縱向尺寸小,安裝較為靈活,工作時由具有自鎖功能的蝸輪蝸桿減速機將電機動力輸出傳遞至消隙齒圈,驅動其在齒條上帶動天線部件進行直線運動。直線運動模塊如圖7所示。
支撐框架總長為3600mm,直線導軌采用兩根1800mm的超高精度滾珠直線導軌拼接而成。因系統具有半徑式掃描和直徑式掃描兩種形式,在直線掃描機構框架上設計雙法蘭,如圖8所示,以適應不同使用方式。
考慮到天線部件的軸向尺寸和整體重量,按傳統將其布置在支撐框架前端面(來波方向)需要將天線部件架空以避讓吸波材料,這樣會對框架產生較大偏載力矩從而加大扭轉變形。經權衡,采用偏置式布局,將天線部件安裝在支撐框架的上方,同時主旋轉安裝法蘭也偏置安裝,兩個軸心偏置距離一致,以保證在主旋轉過程中直線運動始終沿極徑運動。
直線運動采用HIWIN超高精密級直線導軌作為運動機構,安裝精度要求為0.015mm,在3500mm有效行程上滑塊端面相對于導軌安裝基準面的平行度為0.012mm。
直線掃描機構基座采用多種截面規格的矩形鋼管及鋼板焊接成形,經校正及人工時效后整體銑削導軌安裝面。銑削加工精度等級可達6級,對應3600mm導軌長度的直線度(來波方向平面度)為0.06mm[5],尚未達到要求,因此加工完成后需要在裝調中對直線度進行校正。在實際裝調中采用激光平面儀輔助,通過裝調技術將導軌在來波方向的平面度調整至全行程0.02mm。因裝調中直線支撐框架靜置在大理石平臺上無受載變形,實際分析時需將力學仿真中的變形量疊加至該精度指標。通過計算,在直徑安裝方式下可以滿足0.05mm的要求,而半徑式安裝超出0.05mm的要求,因此進行平面度補償是正確的選擇。該支撐結構的剛性對精度貢獻極大,因此其結構設計至關重要,在確定了最大尺寸包絡和結構布局等約束條件下,在詳細設計時進行了多輪仿真如圖9所示,限于篇幅將對該結構的仿真優化單獨進行討論。
主極化模塊主要由基座殼體、旋轉法蘭、驅動齒輪副、圓光柵組件、軸承、蝸輪蝸桿減速機、電機以及同步帶換向組件等組成。旋轉法蘭共有2件,通過轉臺軸承固定在旋轉基座殼體上,直線掃描機構及配重掃描機構分別固定在前旋轉法蘭和后旋轉法蘭端面。旋轉運動由具有自鎖功能的蝸輪蝸桿副傳動,電機驅動同步帶帶動蝸桿轉動,蝸桿驅動蝸輪進而帶動主軸旋轉。對扭轉剛性的高要求致使法蘭直徑較大,需要采用裝有鋼柵尺的一體式轉臺軸承,具備軸承承載與位置反饋功能,形成閉環控制,如圖10所示。
方位調整模塊安裝于主旋轉模塊下方,采用鑄造鋁合金殼體作為主承載部件,使用單盤大直徑交叉滾子軸承作為方位旋轉運動副。驅動方式選用三級復合傳動形式,初級為行星減速機,二級為同步帶傳動,末級為具有自鎖功能的變導程消隙蝸輪蝸桿副。在方位旋轉主軸末端安裝圓光柵作為位置反饋,如圖11所示。
俯仰調整模塊安裝在立柱標準節下方,以避免俯仰調整過程中產生的直線掃描機構與立柱標準節正面粘貼的吸波材料在旋轉中的干涉。俯仰調整機構采用U型支撐結構,并對支撐框架進行拓撲優化設計。因輸出扭矩極大(約20000Nm),因此采用4級復合傳動,初級行星減速機,二級同步帶,三級為具有自鎖功能的蝸輪蝸桿減速機,末級為非完整齒輪傳動,如圖12所示。為提高使用安全性,使用具有抱死功能的驅動電機,使動力環節實現安全性冗余設計,在俯仰向調整至所需角度后可斷電鎖死該運動副。
掃描架支撐結構主要由主支撐標準節及底支撐座(底支撐座1模塊及底支撐座2等)組成,用于所有運動部件的支撐和安裝。主支撐標準節外形尺寸800mm×800mm×1000mm,采用矩形管及鋼板焊接成形,焊后加工安裝對接法蘭,并在頂部設置可拆卸吊耳,上下法蘭所有機械接口保持一致,作為縱向安裝零部件的接口標準,以利于設備分模塊安裝,如圖13所示。
底支撐座模塊位于掃描架最底部,因掃描架支撐結構與暗室地面無固定,為提高穩定性以及解決分部件安裝過程中所產生的傾覆力矩造成的影響,需要在主支撐周向安裝輔助支撐進行加固。底支撐座模塊包括底支撐座1、底支撐座2、斜支撐、液壓缸及支撐腳輪等。底支撐座1和底支撐座2是主要承載部件,外形尺寸約為1850mm×1850mm×1950mm,采用鋼結構焊接成型,主體材料為鋼質型材(工字鋼、槽鋼、矩形管等)和鋼板;斜支撐用于平衡傾覆力矩,主要采用矩形鋼管焊接成型;液壓缸安裝在底支撐座四角,用于掃描架整體的支撐(采用中央控制器以保證同步工作);支撐腳輪共有8件,安裝在底支撐座1的底部,如圖14所示。
底直線移動模塊安放在底支撐座模塊下部空檔內,用于支撐掃描架整體前后移動。底直線移動模塊頂部安裝滾珠直線導軌滑塊組作為運動部件,總高度略小于液壓缸舉升高度,兩端安裝可收放的腳輪,在液壓缸升起時(掃描架工作狀態)由人工推送至底支撐座1底部空檔內,將滑塊固定在底支撐座的安裝孔位上,收起底直線移動模塊兩端移動腳輪,然后收起液壓缸,使得底直線移動模塊底部著地,推動掃描架在底直線移動模塊上進行移動。由于尺寸及重量的限制,底直線移動模塊長度約為3250mm,采用長度為3200mm的滾珠直線導軌,單次移動距離約為1.3m。在需要較大距離移動時,重復上述過程即可,如圖15所示。
2.3 儲運及安裝設計
大型緊縮場測試掃描架屬于大型現場型設備,儲運和現場安裝均是設計邊界條件,用于確定設備最大外形包絡、重心位置、搬運點等,并以此進行模塊分解,作為各模塊的詳細設計依據。根據調研,國內大部分暗室配備有天車,最小起吊重量約為500kg,因此單個功能模塊以500kg為標準設計。底支撐座模塊作為非吊裝部件可采用堆高車或叉車進行安裝。位于2m以上高空位置的模塊安裝使用小型高空作業平臺進行,操作平臺高度8m,工作高度10m,考慮到該設備對掃描架總體安裝意義重大,因此在總體設計時進行可安裝性分析,如圖16和圖17所示。
該掃描架系統在儲存和轉場運輸上面臨起重吊裝困難、運輸轉移困難等大型設備特有的問題,需要在總體設計時以最大外形包絡進行貯運設計,確保掃描架系統打包后可裝入兩個尺寸為20in×8in×9.5in(內部尺寸5898mm×2350mm× 2695mm)的6m標準尺寸集裝箱中。集裝箱具備標準接口,可滿足車載運輸、吊裝、海運等需求,具有防水能力,是儲運大型設備的理想選擇,同時定制前后雙門結構,便于裝卸。考慮到設備的精度極高,安裝法蘭多為外露型接口,運動模塊采用獨立包裝箱設計,以保證安裝基準面在運輸過程中受到有效保護。立柱標準節以及輔助支撐節等非運動結構,采用簡易包裝保護安裝法蘭的設計以降低成本,如圖18所示。
3 關鍵技術指標的測試
在掃描架設計加工完成后進行總裝和功能調試,對主要技術指標采用徠卡AT902激光跟蹤儀進行測試。其中,最關鍵的技術指標為天線法蘭運行平面度0.05mm。如圖19至21所示。
在測試中開啟激光平面發射器,形成基準參考平面,補償系統實時讀取位置敏感探測器PSD感應區零位與基準參考平面的位置偏差,對掃描架平面度進行補償。完成后測量關閉該補償系統下的平面度,以進行對比,結果如圖22和圖23所示。
經專業計量單位現場檢測后,掃描架沿來波方向掃描臂直線度分量峰峰值優于0.058mm,掃描面在完整的360°極化平面上平面度RMS值0.048mm。檢測數據見表1。
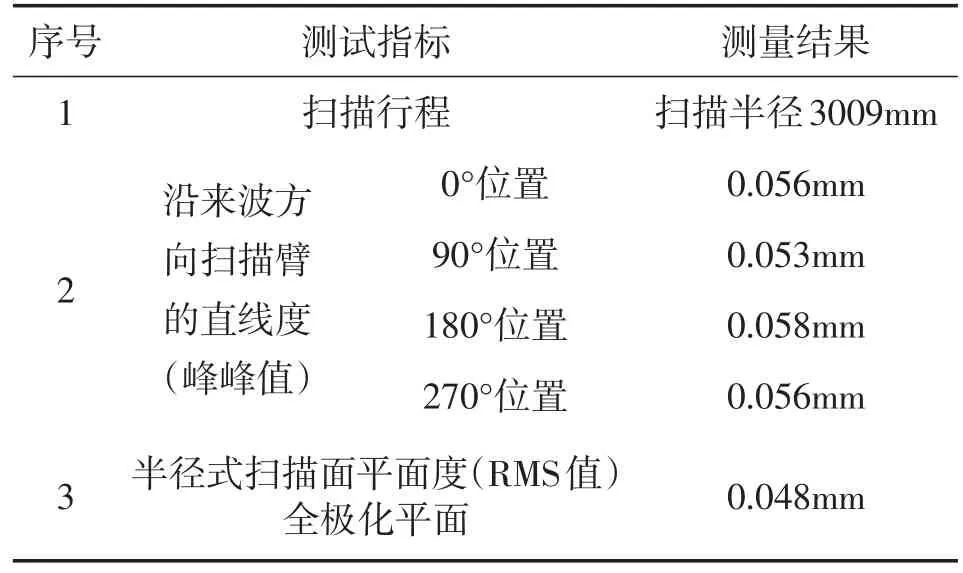
表1 掃描架平面度指標檢測結果(部分)
4 結束語
本文介紹了一種大型緊縮場極坐標測試掃描架的設計,該掃描架具備大掃描行程、便于儲運、可實現多種模式的安裝,具有適應性強、高精度、大測量范圍等優勢。測試結果表明關鍵的平面度技術指標在總體及各功能模塊優化設計和精細裝配的基礎上,通過激光平面補償系統的實時補償,可將誤差控制在0.048mm以內,同時總裝調過程安全性高、便利程度好,可適用于國內多數緊縮場的現場計量校準工作,具有巨大的應用前景。
[1] 戴晴,黃紀軍,莫錦軍.現代微波與天線測量技術[M].北京:電子工業出版社,2008,28(1):196-200.
[2] 胡春華,樊銳,陳五一.緊縮平面場掃描架系統研制[J].北京航空航天大學學報,2002,2.
[3] 張厚江,樊銳,陳五一.高精度緊縮場掃描架的研制[J].機械設計與制造.2005,9.
[4] 曹鐵澤,孫安斌,王繼虎.基于圓柱筒支撐緊縮場極坐標測試掃描系統的研制[J].新技術新儀器,2014,34(4):11-13.
[5] 機械設計手冊編委會.機械設計手冊[M].北京:機械工業出版社,2007.
猜你喜歡
河北畫報(2020年8期)2020-10-27 02:54:06
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
電子制作(2019年19期)2019-11-23 08:41:36
電子制作(2019年15期)2019-08-27 01:11:50
電子制作(2019年7期)2019-04-25 13:18:16
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
商周刊(2017年26期)2017-04-25 08:13:04
