衛(wèi)星導(dǎo)航模擬器星座軌道外推方法研究
2018-02-05 10:20:11葉紅軍
無線電工程 2018年2期
葉紅軍,潘 峰,李 笛
(1.衛(wèi)星導(dǎo)航系統(tǒng)與裝備技術(shù)國家重點(diǎn)實(shí)驗(yàn)室,河北 石家莊050081; 2.北京衛(wèi)星導(dǎo)航中心,北京100094)
0 引言
衛(wèi)星導(dǎo)航模擬器可以通過仿真的方式生成各種動態(tài)條件接收機(jī)天線端的導(dǎo)航信號,可以更加直觀地認(rèn)識軌道的空間分布、運(yùn)行周期以及衛(wèi)星系統(tǒng)在地面上的DOP值分布等,結(jié)合信號處理算法可以十分逼真地對北斗、GPS等導(dǎo)航系統(tǒng)的觀測值信號進(jìn)行仿真,生成模擬的載波和偽距觀測值,實(shí)現(xiàn)對接收機(jī)的調(diào)試及測試[1-4]。逼真的模擬導(dǎo)航星座運(yùn)行及空間信號的各種特征,是模擬器開展接收機(jī)測試的前提[5-7],其中長時(shí)間高精度的實(shí)現(xiàn)運(yùn)行軌道的模擬是模擬器產(chǎn)生導(dǎo)航電文的基礎(chǔ),北斗導(dǎo)航系統(tǒng)由于我國國土的特點(diǎn)在星座設(shè)計(jì)上是一種多軌道面混合組網(wǎng)的方式,對其高精度的導(dǎo)航模擬軌道外推與GPS星座相比更加困難,同時(shí)在模擬器運(yùn)行中還需要綜合考慮工程的可實(shí)現(xiàn)性,針對此問題,開展針對北斗混合星座的長時(shí)間精密軌道遞推研究,并實(shí)現(xiàn)精度與計(jì)算量的統(tǒng)籌,提高工程可實(shí)現(xiàn)性。
1 導(dǎo)航衛(wèi)星軌道誤差因素
導(dǎo)航衛(wèi)星在空間軌道運(yùn)行中將受到各種攝動力的影響,使得其運(yùn)行軌道變得很復(fù)雜,以致初始時(shí)刻的位置和速度(或6個(gè)軌道參數(shù))不再是理想的二體問題情況下的常數(shù),而是時(shí)間的復(fù)雜函數(shù)。衛(wèi)星受力一般分為兩大類:中心力與非中心力[8-10]。保守?cái)z動力包括地球非球體引力位攝動、N體攝動、因日月引力引起的地球固體潮攝動及海潮攝動、大氣潮攝動、地球自轉(zhuǎn)形變攝動以及因相對論效應(yīng)引起的攝動等。非保守?cái)z動力包括大氣阻力攝動、太陽直射輻射壓攝動和地球反照輻射壓攝動等[11]。
1.1 重力場模型分析
衛(wèi)星受地球非球形引力是否精確取決于地球重力場模型的精確程度。確定引力場模型的方法主要有3種:通過對衛(wèi)星軌道的跟蹤觀測、利用陸地重力測定法和利用高度計(jì)數(shù)據(jù)確定引力場模型。
在近40多年的時(shí)間里,經(jīng)過研究發(fā)現(xiàn)對于高度計(jì)數(shù)據(jù)誤差影響最大的就是衛(wèi)星軌道誤差,對于軌道誤差影響最大的就是地球重力場模型的精確程度,因此在重力場模型上投入了廣泛的、深入的研究,從1959年第一次精密確定J2項(xiàng)系數(shù)以來,到目前先后有Kozai、Itzsak、Kaula、Rapp、Gaposchkin、GEM-9、GEM-10B、GRIM3-L1、GRIM4-2S2、GEM-T3、JGM-3、EGM96S。JGM-3對于精密定軌已經(jīng)是一個(gè)非常精確的重力場模型,是70階70次的模型[12]。盡管JGM3相對于精密定軌已經(jīng)足夠,人們又發(fā)展了新的重力場模型,利用了40顆衛(wèi)星的跟蹤數(shù)據(jù),采用GPS和TDRSS衛(wèi)星對衛(wèi)星跟蹤系統(tǒng),使引力場模型又有了進(jìn)一步的提高,獲得了EGM96S(70×70)和EGM96(360×360)模型。
因此,可以通過選擇JGM-3、EGM96S和EGM96模型來計(jì)算衛(wèi)星軌道,能達(dá)到比較理想的軌道外推效果。
1.2 大氣阻尼模型分析
大氣阻尼模型目前難以建立十分精確的模型。迄今為止雖然已經(jīng)建立了很多大氣模型,但各模型之間的差異比較大,在200 km的高度上,各模型典型密度差為20%,在較高的高度上相差更高。目前大氣模型有:Harris-Priester、Jacchia-71、Jacchia-Roberts、Jacchia-Lineberry、Jacchia-Gill、Jacchia-77、Jacchia-Lafontaine、MSIS-77、MSIS-86、TD-88和DTM[13]。
J71模型提出了一個(gè)合理的大氣密度模型的描述,因此廣泛的應(yīng)用于精密定軌和軌道外推研究中。J71模型考慮了周日和27天太陽效應(yīng),根據(jù)大氣密度是角度ψd(衛(wèi)星和周日峰之間的角度)的函數(shù),通過對衛(wèi)星觀測推導(dǎo)而來。在高度h大氣密度被表示為:
(1)
式中,
logeρ′(h)=-16.021-1.985×10-3h+6.383e-0.026h;
F10.7為10.7cm太陽輻射流量;


(2)
除了J71模型的廣泛使用外,各種其他密度模型也依然有其應(yīng)用價(jià)值,其中也不乏簡單的、容易執(zhí)行的和精巧的理論的模型,為了比較這些模型,表1是以J71模型為基準(zhǔn)計(jì)算的各模型平均大氣密度、最大大氣密度之差以及在CPU計(jì)算時(shí)間上的差異。
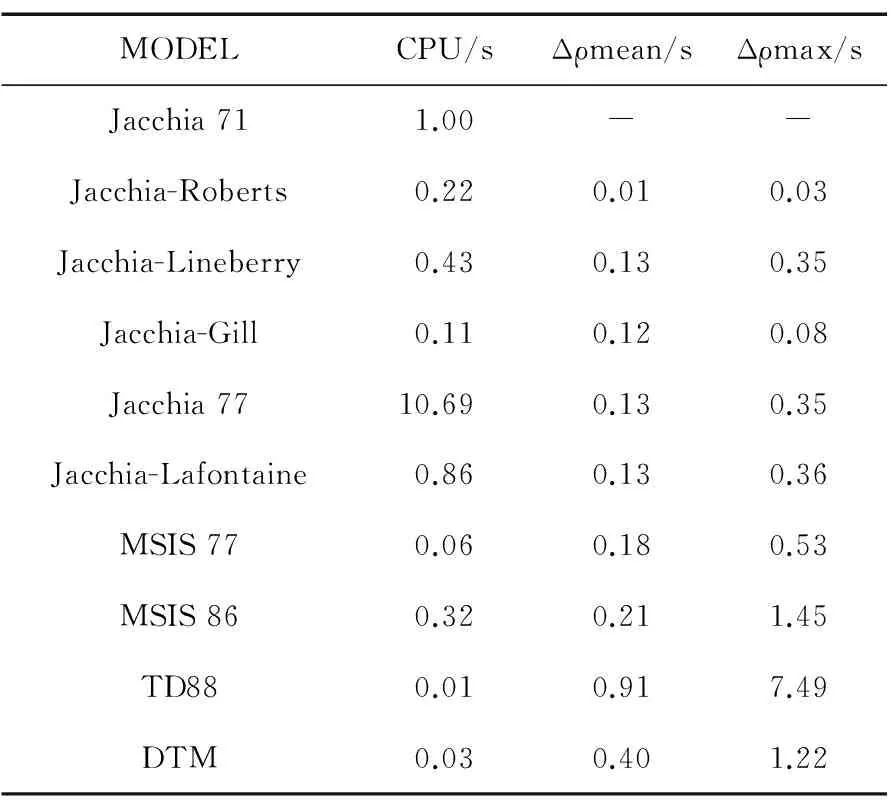
表1 各種大氣密度模型與J71的比較CPU
2 高穩(wěn)定軌道積分方法
在衛(wèi)星的精密軌道外推中,積分器的設(shè)計(jì)是一項(xiàng)基礎(chǔ)工作。它的作用體現(xiàn)在2個(gè)方面:如果建立了衛(wèi)星的力模型,則可以獲得衛(wèi)星的運(yùn)動方程。通過對衛(wèi)星的運(yùn)動方程進(jìn)行積分就可以獲得衛(wèi)星的運(yùn)動狀態(tài)(位置和速度向量);同時(shí)積分器要完成變分方程的積分,獲得衛(wèi)星狀態(tài)對軌道參數(shù)和力模型參數(shù)的偏導(dǎo)數(shù)用于軌道外推。程序運(yùn)行的大量時(shí)間是在積分過程,因此除了動力學(xué)模型需要很精確外,外推計(jì)算中也需要高精度的積分器。
目前積分器所采用的比較成熟的算法有以下幾種:① Runge-Kutta算法;② Adams算法;③Cowell算法。
2.1 Runge-Kutta算法
Runge-Kutta方法可以用來解如下的初值問題:
(3)
式中,X0為變量X的初值;F為變量t和X的函數(shù)。
如果步長為h,則Runge-Kutta算法可以用來計(jì)算變量X在t0+h的值X(t0+h)。重復(fù)這種步驟就可以獲得一系列的解X(t0+h),X(t0+2h),X(t0+3h),……,X(t0+nh),其中,n是一個(gè)整數(shù)。則利用Taylor級數(shù)可以將X(tn+nh)在點(diǎn)tn處展開如下:
(4)
本質(zhì)上,Runge-Kutta算法是對同階的Taylor級數(shù)展開的逼近。將此算法向前推進(jìn)一步就需要處多次計(jì)算函數(shù)F的值,在多數(shù)實(shí)際應(yīng)用中,這是非常耗時(shí)間的。因此,稱Runge-Kutta算法為單步算法,該方法一般用作多步法的起步算法。
積分的誤差將取決于步長的大小和函數(shù)F的性質(zhì)。為了保證軌道積分具有合理的精度,在計(jì)算中對積分步長進(jìn)行自適應(yīng)控制是一種可取的辦法。由于軌道的周期性,因此,在軌道積分中僅僅需要對一些特殊的周期采用步長的控制。Press于1992年提出了一種新的控制方法,每次積分進(jìn)行2次計(jì)算,一次是采用全步長進(jìn)行,然后以半步長進(jìn)行2次;將這2種方法獲得的結(jié)果進(jìn)行比較就可以判斷是否需要對步長進(jìn)行改變。
2.2 Adams算法
對初值問題,其解為:

(5)
Adams算法使用Newton向后差分計(jì)算來擬合函數(shù)F,表達(dá)式如下:


(6)
式中,F(xiàn)n為函數(shù)在tn處的取值;h為步長;▽kF為函數(shù)F的n階向后差分。
在多數(shù)情況下Adams-Moulton方法要比Adams-Bashforth方法的精度更高;但是,在計(jì)算函數(shù)值Fn+1前必須要有Xn+1,因此,在使用Adams-Moulton方法時(shí)要使用遞歸的方法。一種比較簡單的方法是利用Adams-Bashforth方法計(jì)算Xn+1的近似值,然后利用Xn+1的近似值計(jì)算Fn+1的近似值。經(jīng)驗(yàn)表明,上述方法一般可以達(dá)到足夠高的精度。
2.3 Cowell算法
對初值問題
(7)
其解可以寫為:
(8)
式中,X為衛(wèi)星的位置向量。或者說,函數(shù)F只是問題的函數(shù)而與速度無關(guān)。
與Adams-Bashforth方法類似,函數(shù)F由式(9)擬合:
(9)
由于使用了Fn+1來擬合函數(shù),因此,Cowell方法可以達(dá)到比Stormer方法更高的精度。同樣,計(jì)算Fn+1需要Xn+1上的值,因此,解決此問題需要進(jìn)行迭代。可以使用Stormer方法計(jì)算Xn+1的近似值,然后利用該近似值計(jì)算Fn+1從而開始迭代過程。
3 算法選擇與流程設(shè)計(jì)
為了解決定軌問題中的初值問題,上面分析了3種積分方法。Runge-Kutta方法是一種單步算法,不同階數(shù)的Runge-Kutta方法具有不同的計(jì)算公式。即使在同階的Runge-Kutta方法中,其系數(shù)的確定也不是唯一的,在每次向前推進(jìn)積分時(shí),需要多次計(jì)算函數(shù)值,這在計(jì)算效率上是非常不利的。Runge-Kutta方法一個(gè)很重要的特點(diǎn)在于它是自起步的,因此,一般Runge-Kutta方法用作多步算法的起步算法。
Adams算法是一種多步算法。由于其系數(shù)間存在簡單的對應(yīng)關(guān)系,因此,如果需要提高該算法的階數(shù)則很方便。但由于該算法是不能自起步的,在起步后,每次積分都只需要計(jì)算一次函數(shù)值,因此,特別對那些具有復(fù)雜關(guān)系的初值問題具有很高的計(jì)算效率。如果想達(dá)到更高的精度,可以通過在迭代過程中綜合使用Adams-Bashforth和Adams-Moulton方法獲得[14-16]。
Cowell方法也是一種多步算法,其階數(shù)也可以很方便地提高,但該方法也需要其他方法提供起步值。研究表明,Cowell方法具有比同階Adams方法更高的精度,但是,根據(jù)本文推導(dǎo)過程可以發(fā)現(xiàn),該方法只適用于右函數(shù)僅僅是時(shí)間和衛(wèi)星位置向量函數(shù)的特殊情況。但是,像空氣阻力就與衛(wèi)星的速度有關(guān)。因此,Cowell方法只能在部分問題中使用,其他綜合了Cowell算法的方法也具有這種特點(diǎn)。
通過上面的討論,很明顯需要將衛(wèi)星運(yùn)動過程中受到的力進(jìn)行分類:一類力只與時(shí)間和衛(wèi)星的位置有關(guān),其他的力為另一類。第1類可以使用Cowell方法進(jìn)行積分,而第2類就可以采用Adams方法。2種方法的起步初始值均由Runge-Kutta方法提供。
至于如何選擇積分步長和積分器的階數(shù)則取決于軌道遞推所需要的精度。一般,在軟件設(shè)計(jì)中,這2個(gè)參數(shù)會設(shè)置成可調(diào)節(jié)的,這樣,在幾次迭代運(yùn)行后就可以確定一個(gè)比較合適的值。在實(shí)用中,一般采用8階Runge-Kutta方法和12階Adams方法就足夠了。但并不是步長越小越好,也不是階數(shù)越高越好。
表2對幾種常用在衛(wèi)星軌道遞推中的數(shù)值積分器特征進(jìn)行了對比。根據(jù)積分器計(jì)算下一步點(diǎn)用到前面一個(gè)還是多個(gè)步點(diǎn)的信息,可把積分器分為單步法和多步法;根據(jù)積分過程中積分步長是固定不變還是自動調(diào)控,可把積分器分為固定步長法和變步長法;根據(jù)多步法積分過程中是否用到差分算子,可把多步法積分器分為求和型和非求和型(也叫一般型);根據(jù)積分器是對一階還是二階微分方程積分,可把積分器分為一次型和二次型。一般來說,多步法優(yōu)于單步法,因?yàn)殡S著數(shù)值方法的階數(shù)增加,后者計(jì)算右函數(shù)的次數(shù)將增加,而前者基本保持不變,對于軌道遞推這樣的動力學(xué)問題,方程右函數(shù)的計(jì)算是十分復(fù)雜,數(shù)值積分耗時(shí)主要表現(xiàn)在右函數(shù)的計(jì)算上。變步長法優(yōu)于固定步長法,因?yàn)樽儾介L法對橢圓型軌道更有效;求和型優(yōu)于非求和型,因?yàn)榍蠛托透軠p少計(jì)算的省略誤差。二次型優(yōu)于一次型,因?yàn)樵谙嗤木纫笙拢瑢ΧA微分方程求解所允許的步長比對一階微分方程求解時(shí)使用的步長大的多。
每種積分器既有其優(yōu)點(diǎn),也有其缺點(diǎn)。在實(shí)際的應(yīng)用實(shí)踐過程中,要根據(jù)具體問題來選擇適當(dāng)?shù)姆e分方法,既要考慮積分的精度、穩(wěn)定性和收斂性,也要考慮計(jì)算的速度,同時(shí)還要考慮程序設(shè)計(jì)的復(fù)雜性。
表2 數(shù)值積分方法特征
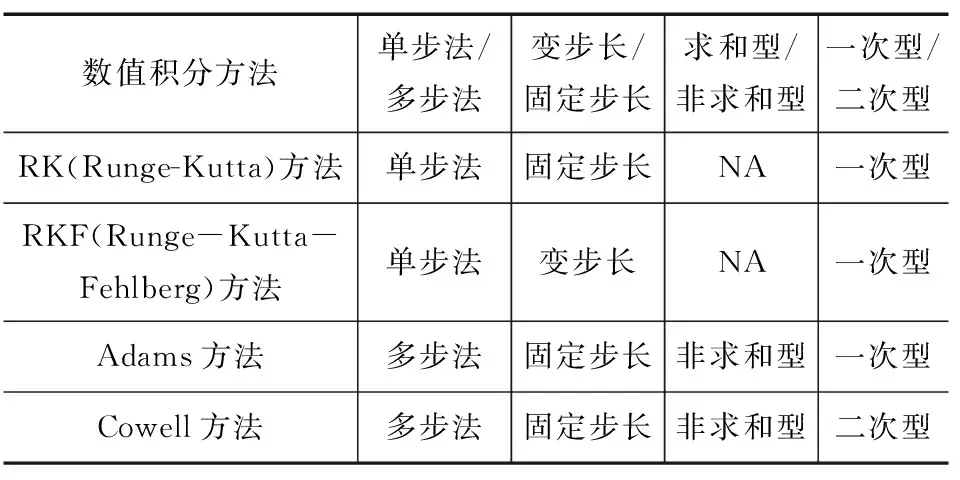
數(shù)值積分方法單步法/多步法變步長/固定步長求和型/非求和型一次型/二次型RK(Runge-Kutta)方法單步法固定步長NA一次型RKF(Runge-Kutta-Fehlberg)方法單步法變步長NA一次型Adams方法多步法固定步長非求和型一次型Cowell方法多步法固定步長非求和型二次型
由于北斗衛(wèi)星星座為由GEO、IGSO和MEO衛(wèi)星組成的混合星座,因此在實(shí)際導(dǎo)航模擬器軌道外推算法上采用RKF和Adams相結(jié)合的方法來進(jìn)行實(shí)現(xiàn)。軌道積分器主要完成對GPS/BDS/GLONASS/GALILEO衛(wèi)星的軌道積分外推工作。數(shù)據(jù)仿真技術(shù)流程圖如圖1所示。

圖1 衛(wèi)星導(dǎo)航模擬器軌道積分器流程
該模塊輸入的是衛(wèi)星的初始?xì)v元以及力模型的基本參數(shù),結(jié)果為積分得到的參考軌道以及相應(yīng)的對各動力參數(shù)的偏導(dǎo)數(shù)。該積分器起步算法采用的是Runge-Kutta-fehlberg方法(RKF),它是一種嵌套的Runge-Kutta方法,容易在計(jì)算機(jī)上實(shí)現(xiàn),而且變步長方便,能保證所需要的精度,穩(wěn)定度也較好。起步后,采用基于Adams顯式Adams-Bashfort公式和隱式Adams-Moulton公式,以及Cowell公式的預(yù)報(bào)校正多步線性積分算法進(jìn)行數(shù)值積分。以上算法非常成熟,而且基本上都可以滿足精度要求。但是,由于低軌衛(wèi)星受力狀況比較復(fù)雜,某些動力模型參數(shù)需要分段估計(jì),因此需要積分器能處理力模型參數(shù)突變的能力。
4 仿真結(jié)果及分析
衛(wèi)星導(dǎo)航模擬器軌道仿真模塊與STK10.0的高精度軌道預(yù)報(bào)模塊(HPOP)積分設(shè)置如表3所示,力學(xué)模型設(shè)置如表4所示,采用相同的地球定向參數(shù)文件。考慮的力學(xué)模型有地球引力、地球固體潮汐影響、日月引力、太陽輻射壓力與相對論效應(yīng)影響,其余影響較小的力學(xué)模型未考慮在內(nèi)。
導(dǎo)航星座軌道仿真位置差異如表5所示。北斗衛(wèi)星星座軌道仿真三維位置差異均方根如圖2所示。
表3 導(dǎo)航星座軌道仿真積分方法設(shè)置
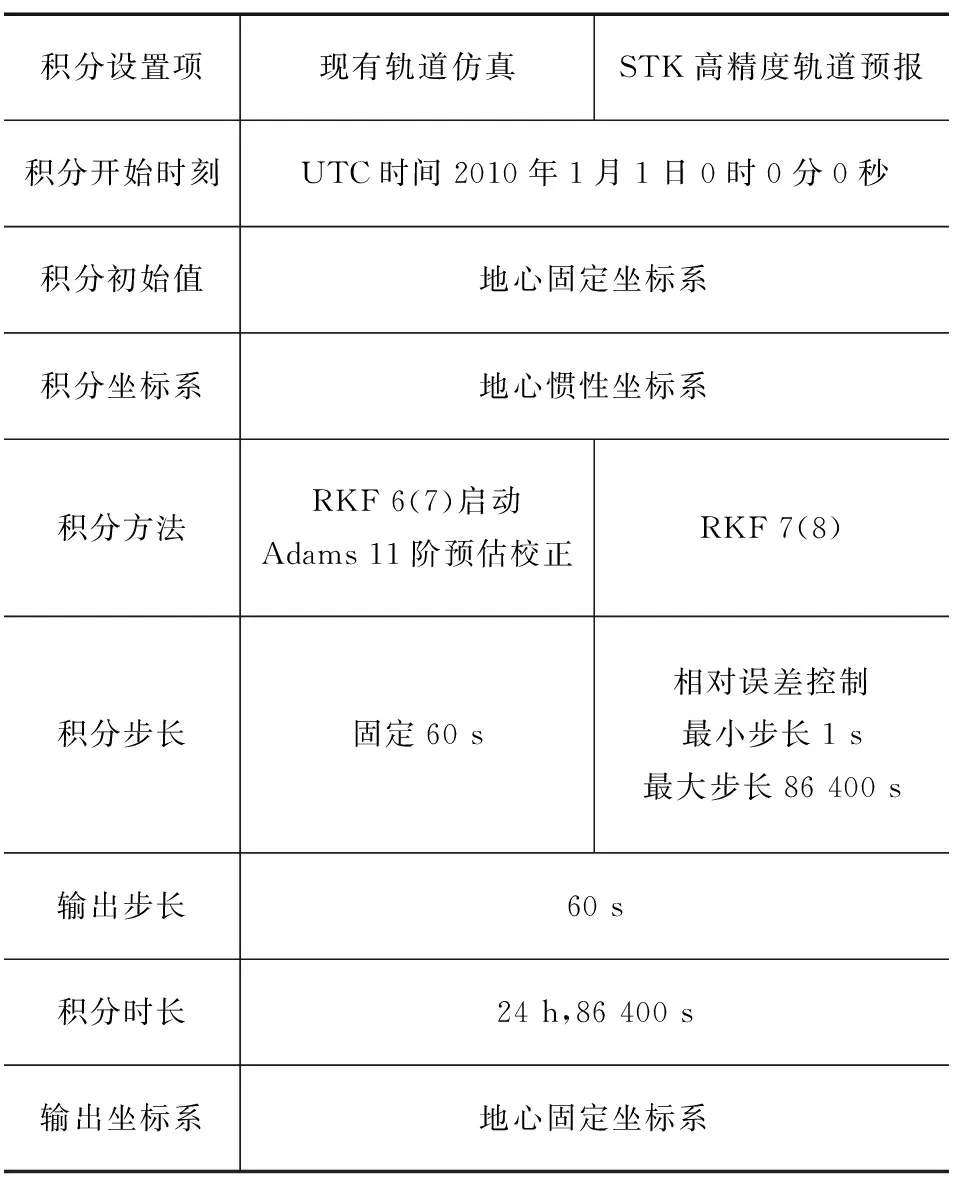
積分設(shè)置項(xiàng)現(xiàn)有軌道仿真STK高精度軌道預(yù)報(bào)積分開始時(shí)刻UTC時(shí)間2010年1月1日0時(shí)0分0秒積分初始值地心固定坐標(biāo)系積分坐標(biāo)系地心慣性坐標(biāo)系積分方法RKF6(7)啟動Adams11階預(yù)估校正RKF7(8)積分步長固定60s相對誤差控制最小步長1s最大步長86400s輸出步長60s積分時(shí)長24h,86400s輸出坐標(biāo)系地心固定坐標(biāo)系
表4 導(dǎo)航星座軌道仿真力學(xué)模型設(shè)置
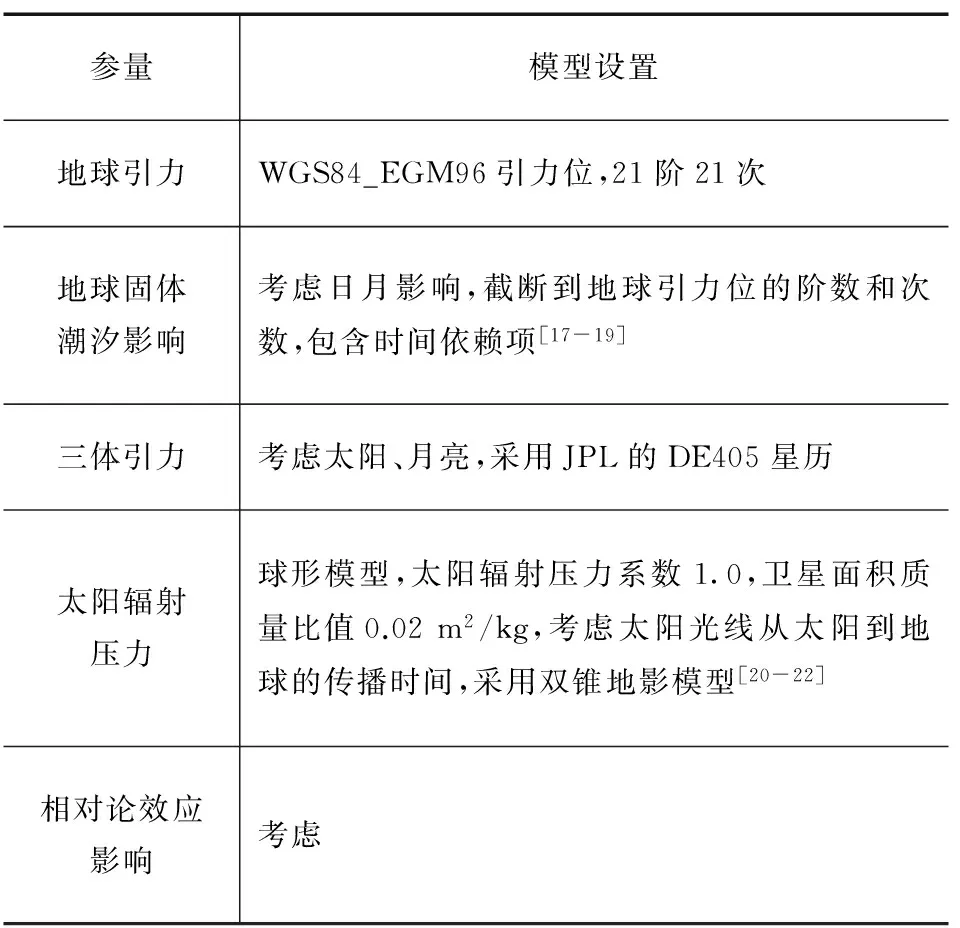
參量模型設(shè)置地球引力WGS84_EGM96引力位,21階21次地球固體潮汐影響考慮日月影響,截?cái)嗟降厍蛞ξ坏碾A數(shù)和次數(shù),包含時(shí)間依賴項(xiàng)[17-19]三體引力考慮太陽、月亮,采用JPL的DE405星歷太陽輻射壓力球形模型,太陽輻射壓力系數(shù)1.0,衛(wèi)星面積質(zhì)量比值0.02m2/kg,考慮太陽光線從太陽到地球的傳播時(shí)間,采用雙錐地影模型[20-22]相對論效應(yīng)影響考慮
表5 導(dǎo)航星座軌道仿真位置差異均方根
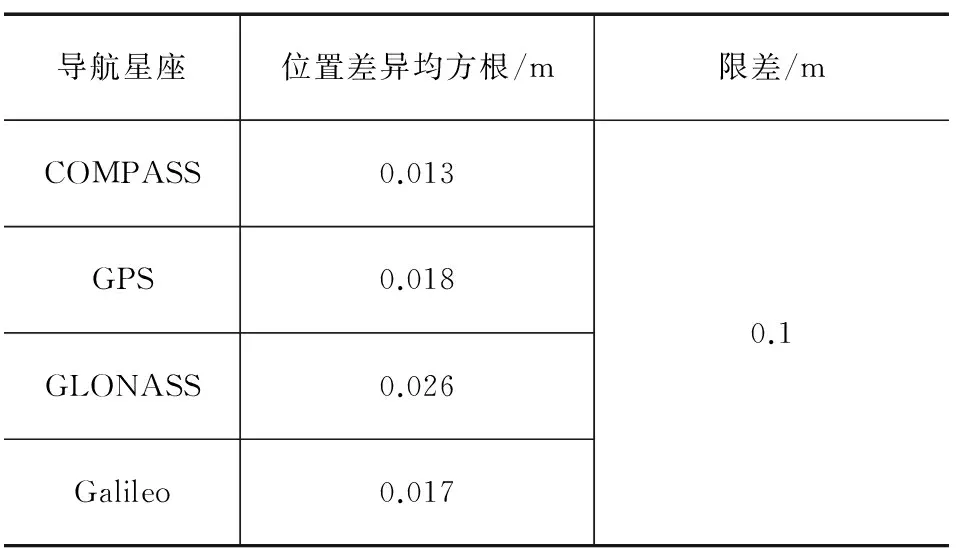
導(dǎo)航星座位置差異均方根/m限差/mCOMPASS0.013GPS0.018GLONASS0.026Galileo0.0170.1
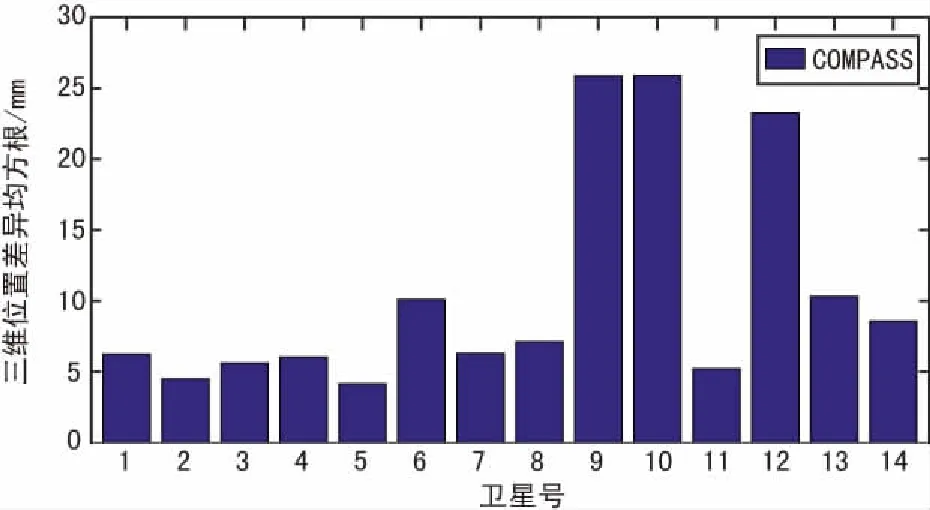
圖2 北斗衛(wèi)星星座軌道仿真三維位置差異均方根
通過圖2可以看出在相同參數(shù)設(shè)置下,通過該方法仿真的結(jié)果與STK軟件軌道數(shù)據(jù)偏差遠(yuǎn)小于0.1m,可以滿足衛(wèi)星導(dǎo)航模擬器數(shù)學(xué)仿真軟件的要求并基于此產(chǎn)生相應(yīng)的導(dǎo)航星歷和電文。
5 結(jié)束語
通過調(diào)研分析國外已有成熟的精密定軌及軌道外推技術(shù),結(jié)合衛(wèi)星導(dǎo)航模擬器工程化實(shí)現(xiàn)需求,深入研究了衛(wèi)星導(dǎo)航星座軌道外推仿真的數(shù)學(xué)模型和算法,完成了各種主要誤差因素對軌道仿真精度的影響分析,確定了衛(wèi)星導(dǎo)航星座軌道外推的方法和軟件方案,完成了導(dǎo)航系統(tǒng)星軌道仿真軟件流程設(shè)計(jì)與實(shí)現(xiàn),仿真成果與STK軟件軌道數(shù)據(jù)偏差小于0.1m,達(dá)到了較高的精度,輸出結(jié)果包括衛(wèi)星軌道坐標(biāo)(根數(shù))、衛(wèi)星運(yùn)動速度,可實(shí)現(xiàn)48h的軌道外推,解決了以往軌道外推隨著時(shí)間逐漸偏差加大的問題,對生成連續(xù)的衛(wèi)星導(dǎo)航星歷支持衛(wèi)星導(dǎo)航接收機(jī)開展長時(shí)間測試驗(yàn)證具有直接的支持作用。
[1] 冉承其.“北斗”衛(wèi)星導(dǎo)航系統(tǒng)建設(shè)與發(fā)展[J].國際太空,2013(10):11-15.
[2] 譚述森.衛(wèi)星導(dǎo)航定位工程(第2版)[M].北京:國防工業(yè)出版社,2010.
[3] 李雋.衛(wèi)星導(dǎo)航信號模擬器體系結(jié)構(gòu)分析[J].無線電工程,2006,36(8):30-39.
[4] 葉紅軍.多模式衛(wèi)星導(dǎo)航模擬器設(shè)計(jì)與實(shí)現(xiàn)[J].無線電工程,2014,44(7):43-46.
[5] 黃勇,胡小工,王小亞,等.中高軌衛(wèi)星廣播星歷精度分析[J].天文學(xué)進(jìn)展,2006,24(1):81-87.
[6] 高玉東,郗曉寧,王威.導(dǎo)航衛(wèi)星廣播星歷擬合改進(jìn)算法設(shè)計(jì)[J].國防科技大學(xué)學(xué)報(bào),2007,29(5):18-21.
[7] 樓益棟,劉萬科,張小紅.GPS衛(wèi)星星歷精度分析[J].測繪信息與工程,2003,28(6):4-6.
[8] 趙娜,董崢.衛(wèi)星星座運(yùn)行管理方法研究[J].無線電工程,2010,40(6):62-64.
[9] 劉季.北斗GEO衛(wèi)星軌道算法研究[J].測繪地理信息,2012,37(5):33-36.
[10] 吳靜,常青,吳今培,等.高動態(tài)GPS信號模擬器衛(wèi)星星歷產(chǎn)生方法研究[J].無線電工程,2004,34(5):42-60.
[11] 劉子令,姚志成.衛(wèi)星/慣性組合導(dǎo)航信號仿真器設(shè)計(jì)
[J].無線電工程,2014,44(7):39-50.
[12] 郁聰沖,邊少鋒.現(xiàn)階段北斗衛(wèi)星導(dǎo)航系統(tǒng)可用性分析[J].海洋測繪.2012,32(5):74-76.
[13] 高為廣,蘇牡丹,李軍正,等.北斗衛(wèi)星導(dǎo)航系統(tǒng)試運(yùn)行服務(wù)性能評估[J].武漢大學(xué)學(xué)報(bào)信息科學(xué)版,2012,37(11):352-355.
[14] 雷浩,廉保旺,何偉,等.STK北斗二代衛(wèi)星導(dǎo)航系統(tǒng)在亞太地區(qū)DOP值仿真分析[J].火力與指揮控制,2014,39(6):52-55.
[15] 周兵.北斗衛(wèi)星導(dǎo)航系統(tǒng)發(fā)展現(xiàn)狀與建設(shè)構(gòu)想[J].無線電工程,2016,46(4):1-4.
[16]WANGMengli,SUNGuangfu,WANGFeixue,etal.WeightedGeometricDilutionofPrecision’sAnalysisforMixedConstellationNavigationSystem[J].ChineseSpaceScienceandTechnology,2007,10(5):50-56.
[17]CAIHongliang,LIXing.WeaknessAnalysisofNavigationConstellationBasedonServiceVailability[J].CSNC2015,2015162(3):150-156.
[18] 高孝杰,張晶晶,高微,等.基于網(wǎng)絡(luò)模式的北斗高精度定位數(shù)據(jù)播發(fā)[J].計(jì)算機(jī)工程,2017,43(10):1-4.
[19] 李飛琦,鮑泓,潘峰,等.智能車導(dǎo)航中的路口軌跡生成策略[J].計(jì)算機(jī)工程,2017,43(8):1-7.
[20] 黃建生,王曉玲,王敬艷,等.GPS導(dǎo)航定位設(shè)備測試技術(shù)研究[J].電子技術(shù)與軟件工程,2013(6):36-37.
[21] 羅大成,劉巖,劉延飛,等.星間鏈路技術(shù)的研究現(xiàn)狀與發(fā)展趨勢[J].電訊技術(shù),2014,54(7):1016-1024.
[22] 胡方強(qiáng),呂濤,包亞萍.改進(jìn)的自適應(yīng)Kalman濾波在SINS/GPS組合導(dǎo)航中的應(yīng)用[J].計(jì)算機(jī)工程與應(yīng)用,2017,53(4):1-6.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
兒童故事畫報(bào)(2019年5期)2019-05-26 14:26:14
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
Coco薇(2016年2期)2016-03-22 02:42:52
核科學(xué)與工程(2015年4期)2015-09-26 11:59:03
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
小雪花·成長指南(2015年4期)2015-05-19 14:47:56