基于非線性模型的磁流變半主動懸架驅(qū)動系統(tǒng)
2018-02-12 03:55:46韓佐悅邢國成
吉林大學(xué)學(xué)報(工學(xué)版) 2018年3期
李 靜,韓佐悅,楊 威,邢國成,周 瑜
(吉林大學(xué) 汽車仿真與控制國家重點實驗室,長春 130022)
0 引 言
磁流變減振器(Magnetorheological damper,MRD)由于其響應(yīng)快、可控性強,近年來逐漸發(fā)展成為半主動懸架的主要執(zhí)行器類型之一,而影響磁流變半主動懸架響應(yīng)時間的主要因素是減振器線圈及驅(qū)動電路特性對減振器跟隨目標(biāo)電流能力的限制[1]。因此,國內(nèi)、外學(xué)者對減振器響應(yīng)特性建模及驅(qū)動器設(shè)計進行了大量研究。
Strecker等[2]創(chuàng)建了一個電感串聯(lián)線圈電阻及開關(guān)電阻的線性減振器線性模型,Godasz等[3]針對減振器電流下降過程提出了一種二級互感線圈模型,以上模型均為線性參數(shù)模型,對于磁流變減振器中的高度非線性特性擬合效果并不理想。Jiang[4]提出了一個時變方程來配合渦流產(chǎn)生的非線性影響,但該模型需基于磁場有限元仿真獲得感應(yīng)電流。
磁流變減振器驅(qū)動方面,Yang等[5]最早提出使用電流驅(qū)動器來降低線圈的響應(yīng)時間;Koo等[6]采用運算放大器比較電路及功率晶體管電路進行直接驅(qū)動及控制;Strecker等[2]則采用場效應(yīng)管直接進行驅(qū)動,以上方案均使用簡單的通斷控制,無濾波穩(wěn)流措施,電流波動嚴(yán)重。因此,近年來大量國內(nèi)、外學(xué)者借鑒直流開關(guān)電源中的BUCK電路進行電流驅(qū)動器的設(shè)計[7-9],BUCK電路通過電感和電容組成低通濾波,實現(xiàn)了對減振器的近似恒流的輸出,有效降低了電路電流的波動,但在動態(tài)響應(yīng)上面仍有一定的不足。
在電流驅(qū)動器控制方面,目前主要有基于模擬電路原理的負反饋控制[2,7]以及簡單的PID[3,8]控制或PI[5]控制。負反饋控制基于電路結(jié)構(gòu),并不能很好地快速響應(yīng);而簡單PID控制的控制效果對控制參數(shù)匹配的依賴性較高,適應(yīng)性不好。
針對以上問題,本文提出一種非線性二級線圈電路模型,并基于自研減振器的方波響應(yīng)測試數(shù)據(jù),采用改進的遺傳算法進行參數(shù)辨識。通過對電路及減振器傳遞函數(shù)的分析,提出變結(jié)構(gòu)電流驅(qū)動器方案,并使用自抗擾控制算法進行控制,提高電流驅(qū)動器的適應(yīng)性及抗干擾能力。最后,通過硬件在環(huán)試驗驗證了所設(shè)計的電流驅(qū)動器對減振器響應(yīng)特性的提升效果。
1 非線性二級線圈電路模型
1.1 非線性等效電路模型的提出
磁流變減振器的電流響應(yīng)會受到減振器內(nèi)部磁場變化、渦流效應(yīng)的影響,而磁流變液以及鐵磁材料的磁化特性具有非常強的非線性特征,因此線性電感及電阻組成的模型僅能模擬電流上升時的大致變化趨勢卻無法同時準(zhǔn)確擬合小電流階段和大電流階段。而減振器電流下降階段的能量耗散趨勢可使用二級互感線圈模型進行近似描述。
本文綜合線性模型及二級互感線圈模型的特點,提出了磁流變減振器非線性二級互感線圈模型,如圖1所示。
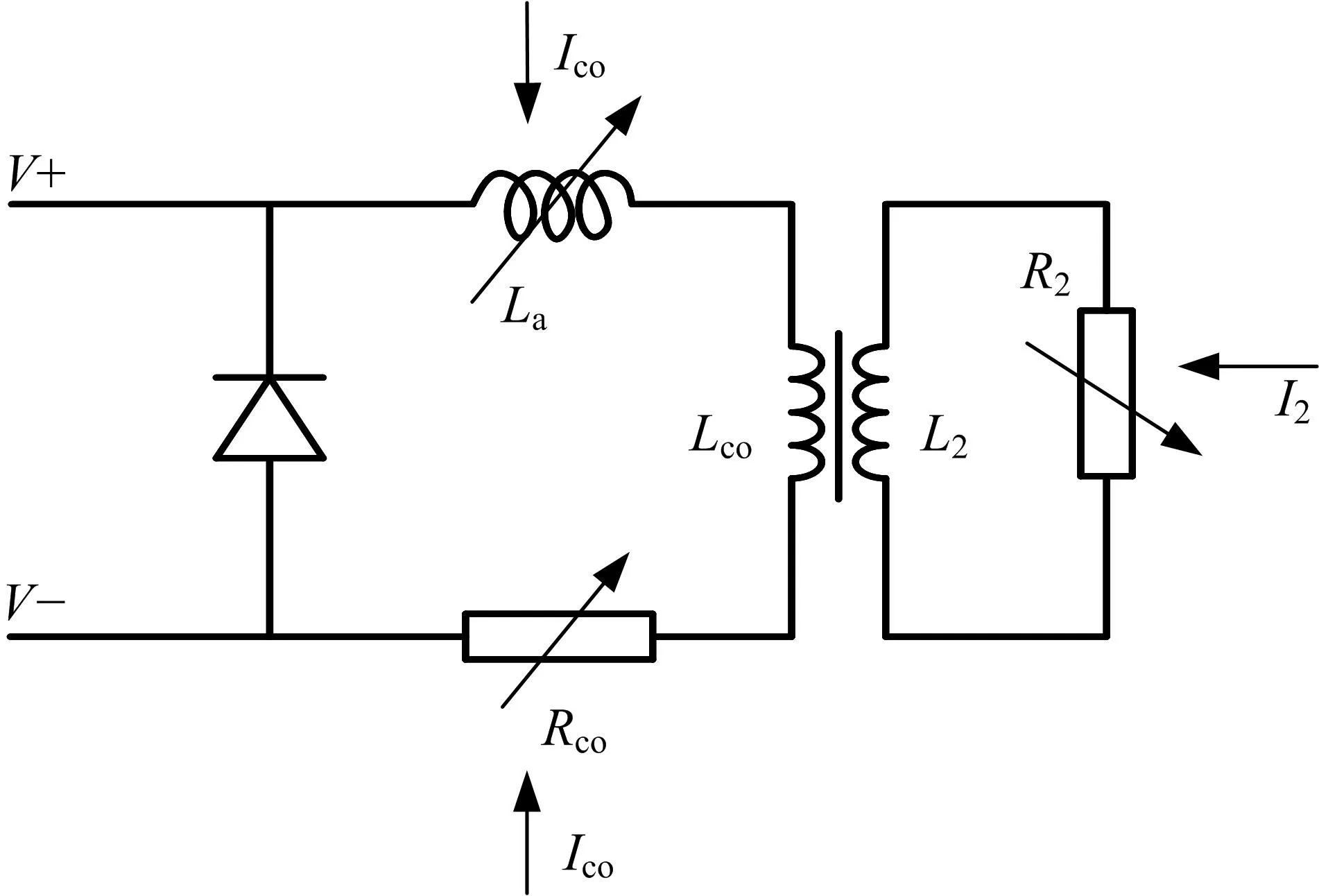
圖1 MRD非線性二級互感線圈電路模型Fig.1 Nonlinear mutual inductor electric model for MRD
模型中Lco與L2組成一對互感線圈,附加電感La、電阻Rco隨電流ico發(fā)生參數(shù)變化并與線圈電感Lco串聯(lián)組成一級回路;線圈電感L2與隨感應(yīng)電流i2變化的電阻R2串聯(lián)組成二級回路,在La與Rco兩端并聯(lián)有續(xù)流二極管,形成減振器耗能回路。
模型中的La、Rco、R2分別引入非線性特性:
式中:La0、La1、La2分別為一級回路中附加電感的常數(shù)項、一次項系數(shù)以及二次項系數(shù);Rco0、Rco1、Rco2分別為一級回路可變電阻的常數(shù)項、一次項系數(shù)以及二次項系數(shù);R20、R21、R22分別為二級回路電阻的常數(shù)項、一次項系數(shù)以及二次項系數(shù)。
由基爾霍夫定律拉氏變換獲得模型系統(tǒng)方程:
(4)
式中:K為線圈互感系數(shù);Uin為減振器輸入電壓,當(dāng)減振器處于電流下降階段,Uin=0,Ico(0)=0,I2(0)=0。
由于狀態(tài)方程中存在電流Ico、I2的三次方項,很難直接獲得線圈電流響應(yīng)的解析解,但可以通過搭建模型進行數(shù)值計算。
1.2 減振器電路模型的參數(shù)辨識
提出的減振器模型中共有12個參數(shù),需針對目標(biāo)減振器響應(yīng)特性進行參數(shù)辨識。磁流變減振器在系統(tǒng)工作中接收以控制步長為周期的恒定電壓輸入,因此選擇方波電壓輸入作為典型工況進行辨識。
測試電路使用可控穩(wěn)壓直流電源控制減振器輸入電壓,使用L298橋電路接收信號發(fā)生器的方波信號控制電路的通斷,使用712電流采集模塊采集減振器的實際電流并放大輸出。
測試中方波周期為400 ms,占空比為50%,低電平為0 V,高電平產(chǎn)生的減振器電流為0.2~3 A,測試獲得的減振器電流響應(yīng)數(shù)據(jù)如圖2所示。
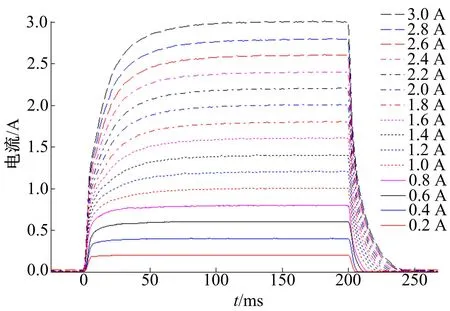
圖2 MRD方波測試數(shù)據(jù)Fig.2 Square-wave test data for MRD
使用Matlab/Simulink中Simscape元件庫依照測試電路搭建仿真模型,如圖3所示。
參數(shù)辨識使用遺傳算法,種群數(shù)量為30,優(yōu)化代數(shù)為100,交叉概率為0.5,變異概率為0.05。優(yōu)化對象為電流上升段(0~100 ms)及下降段(200~250 ms)內(nèi)的仿真電流與試驗結(jié)果的偏差。
適應(yīng)度計算公式為:
f=eupwup+edown=
(5)
式中:eup為電流上升段擬合偏差;edown為電流下降段擬合偏差;Ie為試驗數(shù)據(jù);Is為仿真數(shù)據(jù);Itar為高電平目標(biāo)電流;wup為依據(jù)初次擬合偏差設(shè)置的權(quán)重系數(shù)。
減振器常用工況(2.0 A電流方波輸入)下的參數(shù)擬合結(jié)果如下所示:Lco=18.4820 mH;L2=15.5355 mH;K=0.9255;Rco=1.4416 Ω;Rco1=0.1118 Ω;Rco2=0.0271 Ω;La0=4.5883 mH;La1=1.6078 mH;La2=0.2151 mH;R20=1.0000 Ω;R21=0.0863 Ω;R22=0.0671 Ω。以相同方法進行其他輸入下的參數(shù)擬合,部分?jǐn)M合結(jié)果如圖4所示,其中,直線為試驗值;點劃線為擬合值。
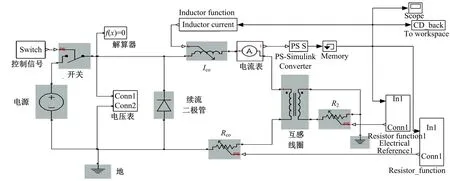
圖3 MRD方波測試仿真模型Fig.3 Simulation model of square-wave test for MRD
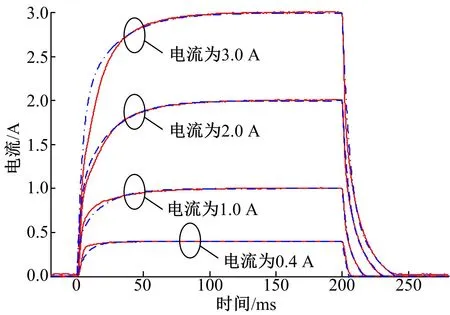
圖4 參數(shù)擬合測試結(jié)果對比Fig.4 Test result comparison for parameter identification
使用擬合優(yōu)度進行不同測試電流下的擬合結(jié)果評價,結(jié)果如表1所示。
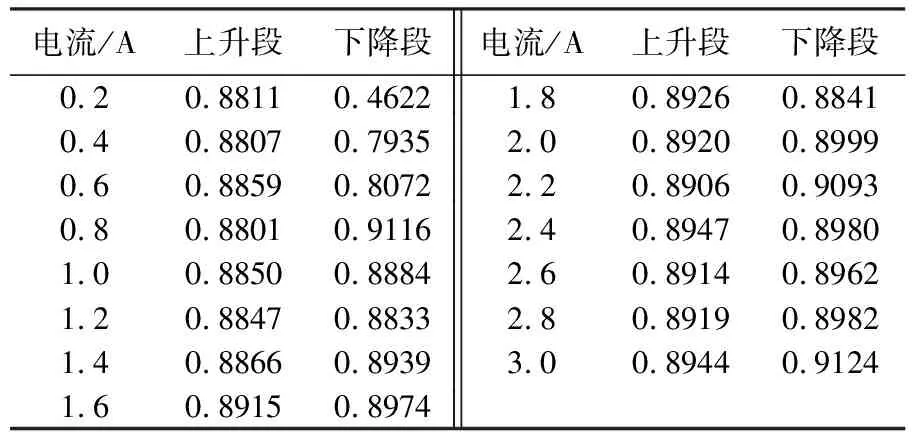
表1 電流方波測試擬合優(yōu)度Table 1 Goodness of fit for current square-wave test
從表1可以看出:除去電流為0.6 A以下測試的下降段擬合優(yōu)度較低,其他擬合優(yōu)度均保持在0.88以上,0.6 A以下下降時間擬合誤差低于3.2 ms,說明擬合數(shù)據(jù)可以很好地反映減振器響應(yīng)特性。
2 電流驅(qū)動電路設(shè)計
現(xiàn)有基于BUCK電路的驅(qū)動器原理如圖5所示。
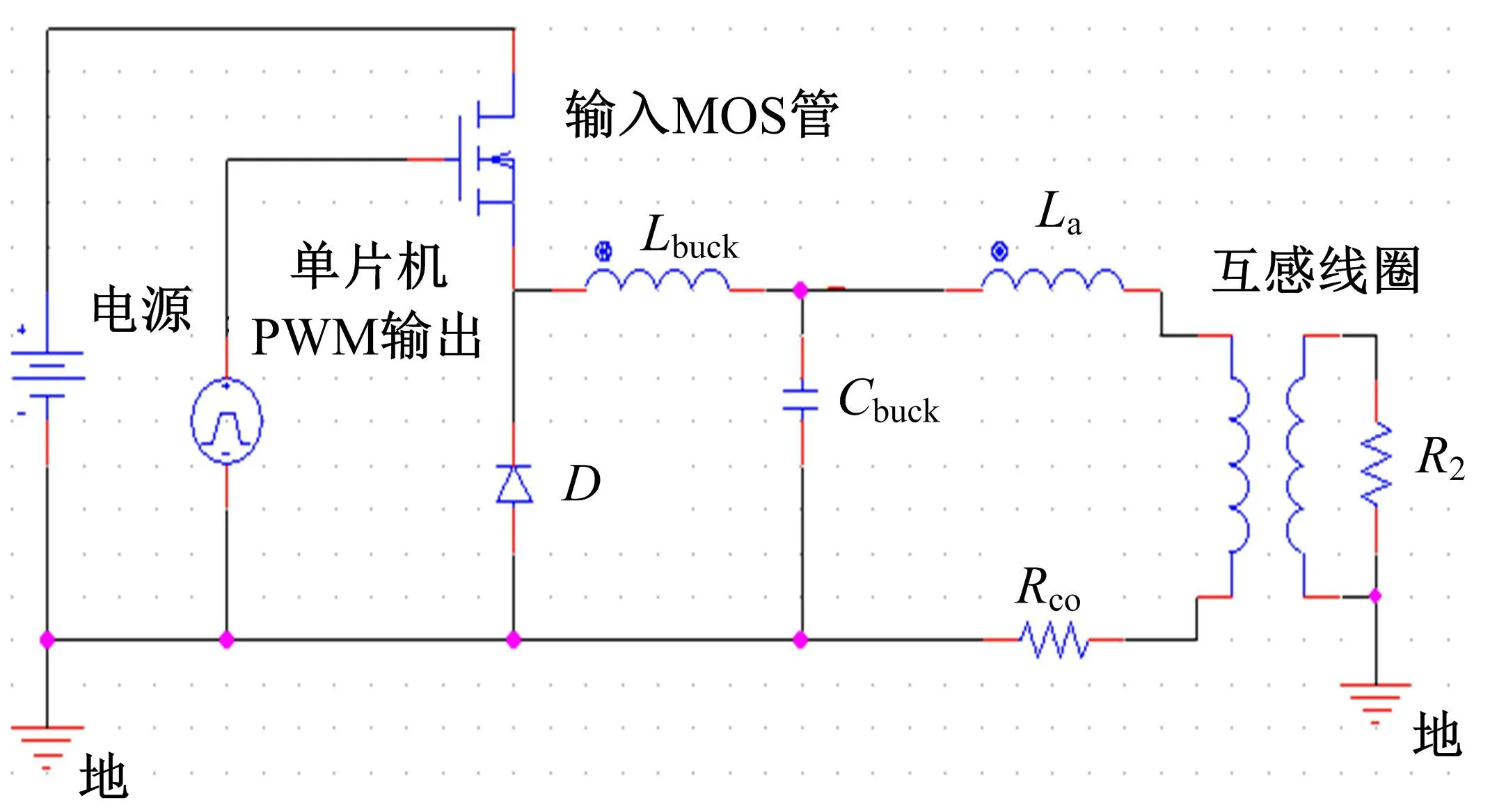
圖5 基于BUCK電路的驅(qū)動器電路Fig.5 Current driver based on BUCK circuit
該電路的系統(tǒng)方程為:
(6)
式中:Lbuck、Cbuck分別為BUCK電路中的電感值和電容值;U2為減振器輸入端電壓值;M為線圈互感。
求解系統(tǒng)傳遞函數(shù),得到系統(tǒng)特征方程為:
[(La+Lco)L2-K2LcoL2]LbuckCbuckS4+
[RcoL2+(La+Lco)R2]LbuckCbuckS3+
[(La+Lco)L2+LbuckCbuckRcoR2+
LbuckL2-K2LcoL2]S2+
[RcoL2+(La+Lco)R2+LbuckR2]S+RcoR2=0
(7)
由于電路中Lbuck(0.01~0.1 mH)、Cbuck(0.1~0.5 mF)[15]明顯小于磁流變減振器中器件參數(shù)1~2個數(shù)量級,因此特征方程中Lbuck、Cbuck過小,此處忽略不計,系統(tǒng)傳遞函數(shù)簡化為:
LbuckL2-K2LcoL2]S2+[RcoL2+(La+
Lco)R2+LbuckR2]S+RcoR2}
(8)
系統(tǒng)響應(yīng)特性近似為有阻尼二階系統(tǒng),系統(tǒng)固有頻率為:
(9)
系統(tǒng)相對阻尼比為:
(10)
在減振器工作過程中,存在對系統(tǒng)阻尼比需求不同的兩階段:在控制目標(biāo)變化時,需系統(tǒng)相對阻尼比較小以提高電流對控制目標(biāo)的響應(yīng);在控制目標(biāo)不變時,需要系統(tǒng)相對阻尼比較大以維持系統(tǒng)輸出穩(wěn)定。
對系統(tǒng)阻尼比進行分析,除Lbuck參數(shù)影響較小外,阻尼比隨線圈互感M的增大而增大,由于RcoL2明顯小于(Lco+La)R2,增大Rco或L2均可明顯降低相對阻尼比。對于已設(shè)計好的減振器,M和L2均已確定,因此可以使用減振器串聯(lián)電阻的方式增大Rco,改變系統(tǒng)阻尼比,配置出系統(tǒng)不同的動態(tài)響應(yīng)特性。
基于以上分析及傳統(tǒng)BUCK電路提出變結(jié)構(gòu)方案,如圖6所示。
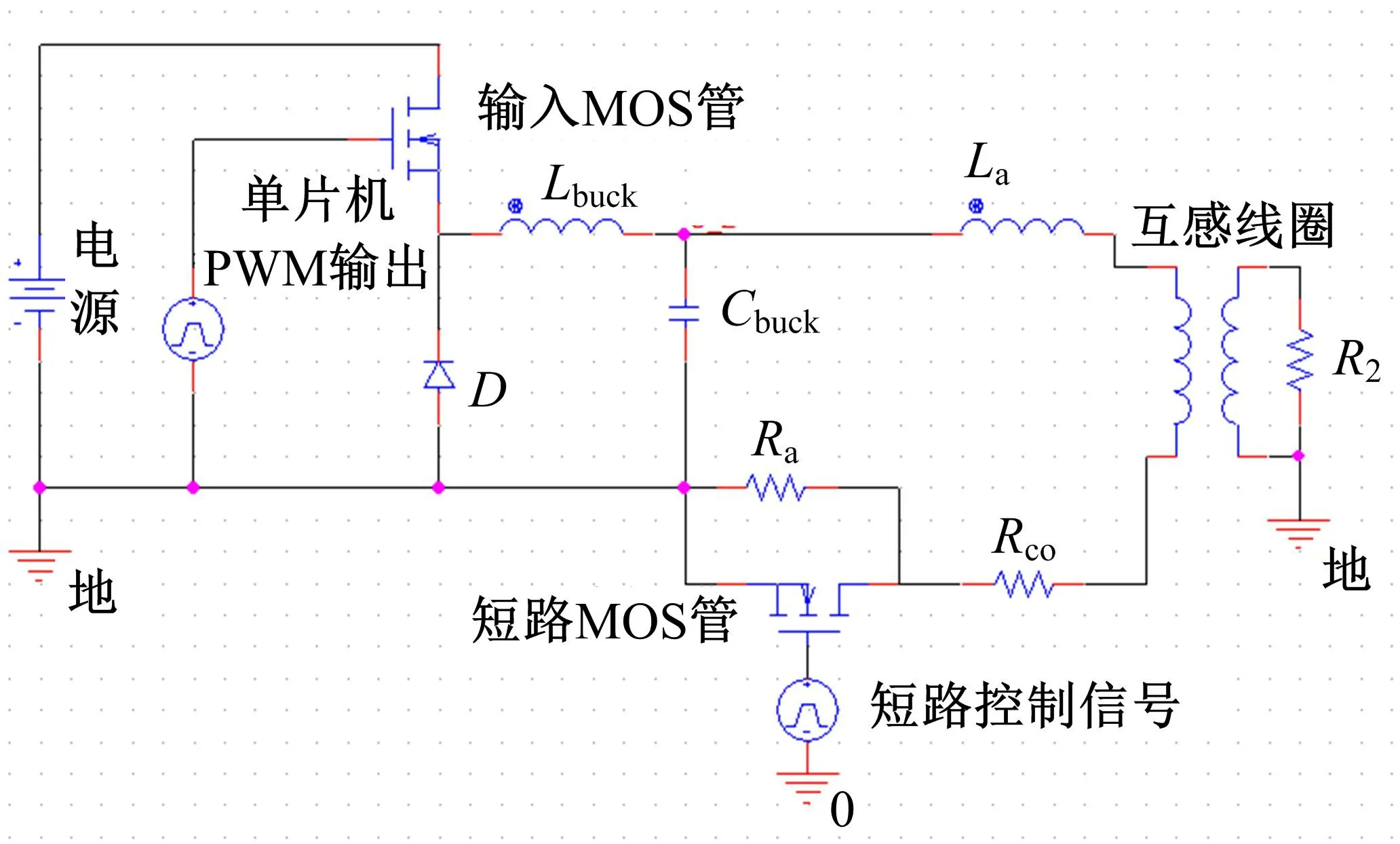
圖6 提出的變結(jié)構(gòu)電流驅(qū)動器方案Fig.6 Variable current driver scheme
該電流驅(qū)動器使用單片機PWM模塊控制BUCK電路輸入電壓,BUCK電路輸出連接減振器后與耗能電阻Ra相連,耗能電阻Ra并聯(lián)耗盡型MOS管,穩(wěn)態(tài)工作狀態(tài)下,MOS管導(dǎo)通將耗能電阻短路,系統(tǒng)保持大阻尼、低功耗狀態(tài),當(dāng)控制目標(biāo)轉(zhuǎn)變時,斷開MOS管,降低系統(tǒng)阻尼比,提高系統(tǒng)響應(yīng)速度。
3 驅(qū)動系統(tǒng)控制算法設(shè)計
串聯(lián)電阻的方式可以有效加快系統(tǒng)響應(yīng),但該方法在電流上升段易造成電路驅(qū)動能力突變導(dǎo)致系統(tǒng)不穩(wěn)定。電流上升段可以使用控制算法利用電源的驅(qū)動電壓余量提升系統(tǒng)的響應(yīng)速度。
在第1.2節(jié)模型參數(shù)辨識中不同工況下會存在一定的參數(shù)波動,而傳統(tǒng)PID控制參數(shù)對系統(tǒng)參數(shù)較為敏感,也容易產(chǎn)生超調(diào)。針對以上問題,采用韓京清院士[10]提出的自抗擾控制方法(Active disturbonce rejection controller,ADRC)搭建控制器。
將系統(tǒng)狀態(tài)方程改寫為:
(11)
式中:A=(La+Lco)L2+LbuckL2-K2LcoL2;B=RcoL2+(La+Lco)R2+LbuckR2;C=RcoR2;x1=icoil。
采用二階系統(tǒng)最速控制綜合函數(shù)fhan構(gòu)建非線性跟蹤微分器;采用非線性fal函數(shù)構(gòu)建非線性擴張狀態(tài)觀測器,觀測器中引入系統(tǒng)已知部分以提高觀測效果;非線性反饋控制器使用偏差信號的非線性fal函數(shù)線性組合生成初級控制信號U0,引入系統(tǒng)擾動估計和系統(tǒng)模型估計線性組合生成最終控制信號U。搭建的自抗擾控制器如圖7所示。
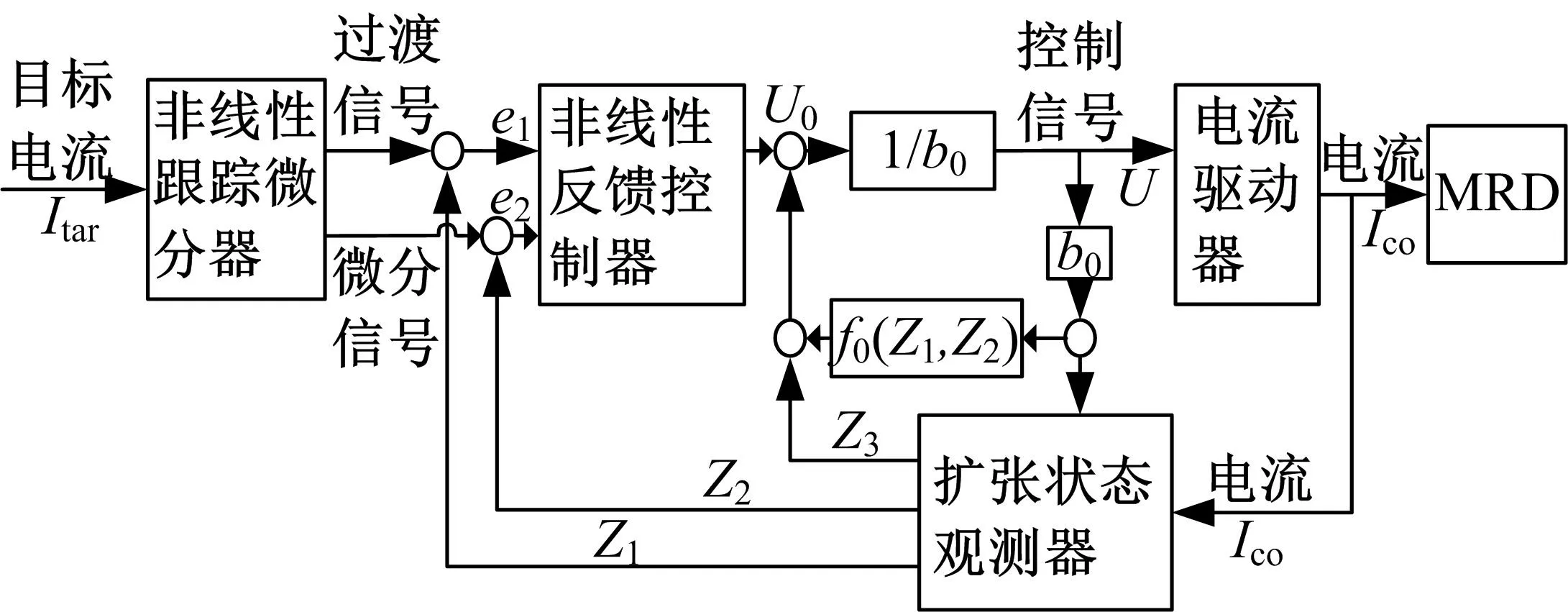
圖7 自抗擾控制器結(jié)構(gòu)框圖Fig.7 Structure diagram of ADRC controller
使用傳統(tǒng)PID控制和自抗擾控制器進行不同目標(biāo)電流下的控制對比,取PID參數(shù)Kp=12,Kd=0.07,Ki=1300,對比結(jié)果如圖8所示。
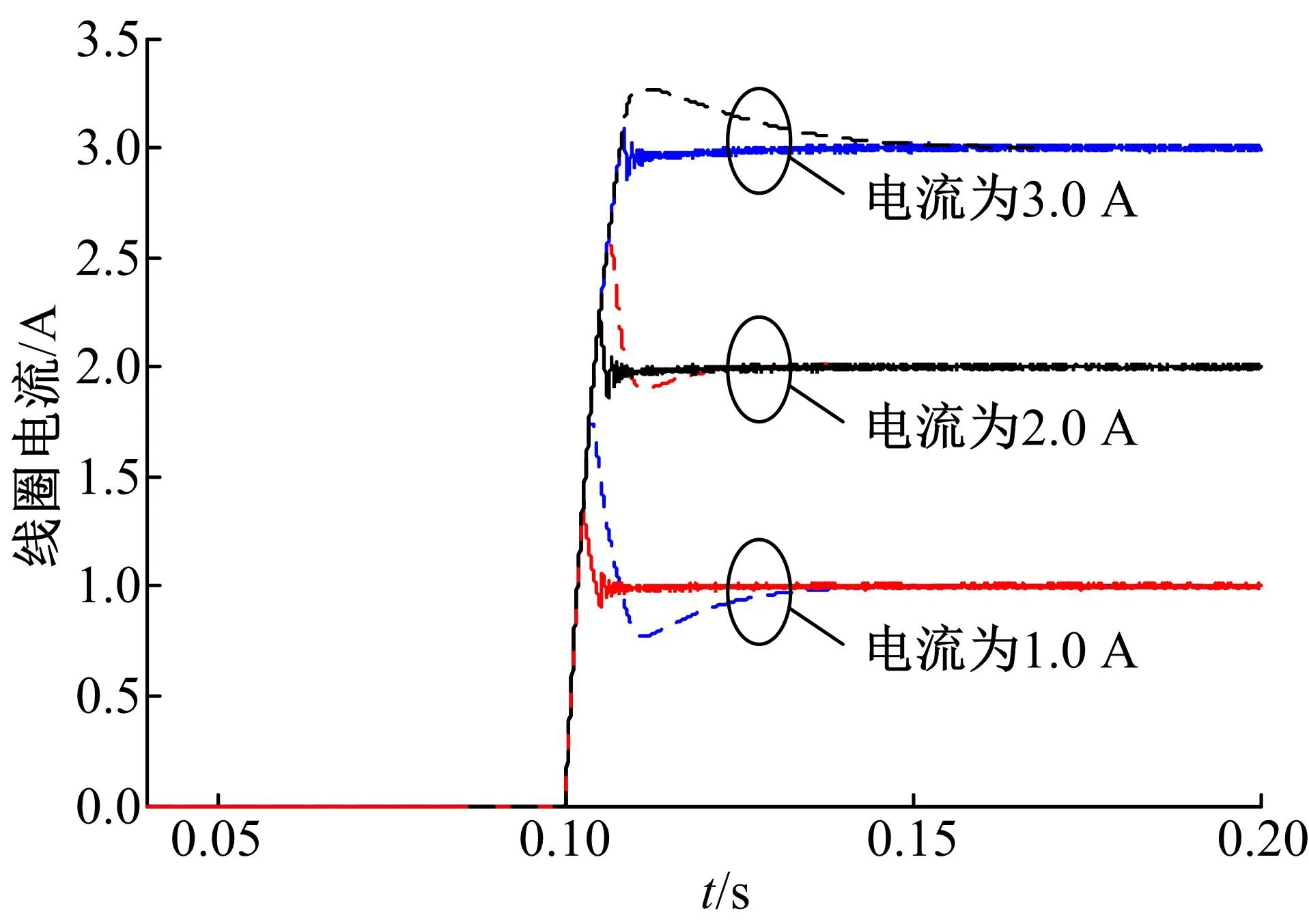
圖8 不同目標(biāo)電流下控制效果對比Fig.8 Control result comparison for variable target current
在2.0 A目標(biāo)電流工況下,將減振器參數(shù)進行±50%的攝動,控制效果對比如圖9所示。
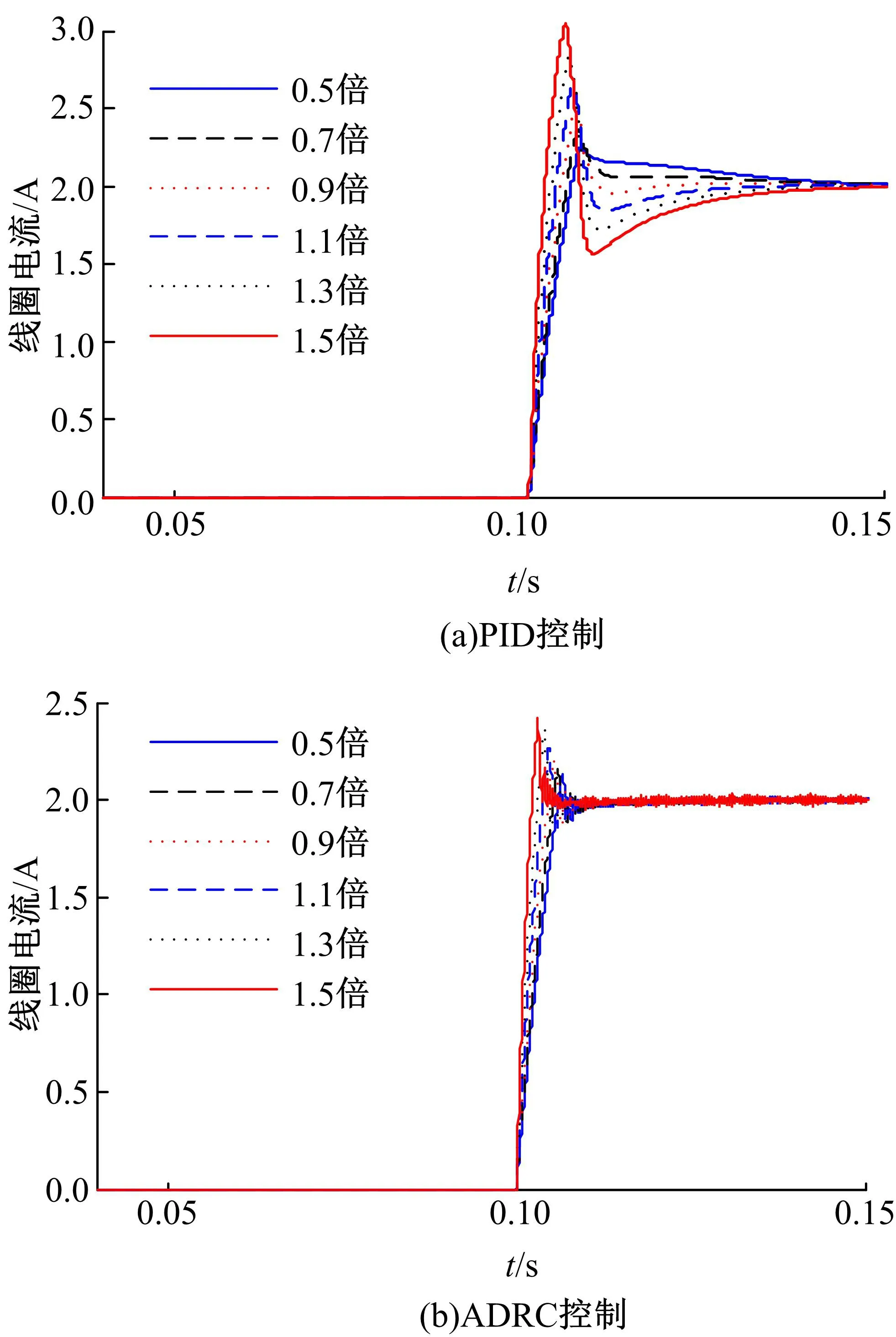
圖9 不同參數(shù)攝動下控制效果對比Fig.9 Control result comparison for variable parameters
通過對比發(fā)現(xiàn),針對電流上升段,在不同控制工況下及參數(shù)攝動下,自抗擾控制具有比傳統(tǒng)PID控制更穩(wěn)定的控制效果和更小的超調(diào)量。
針對下降段的耗能電阻切換控制算法則要充分考慮狀態(tài)切換條件,避免在目標(biāo)電流附近及控制目標(biāo)緩慢變化時產(chǎn)生巨大波動,同時防止劇烈放電造成元件燒毀,電路切換控制算法結(jié)構(gòu)如圖10所示。
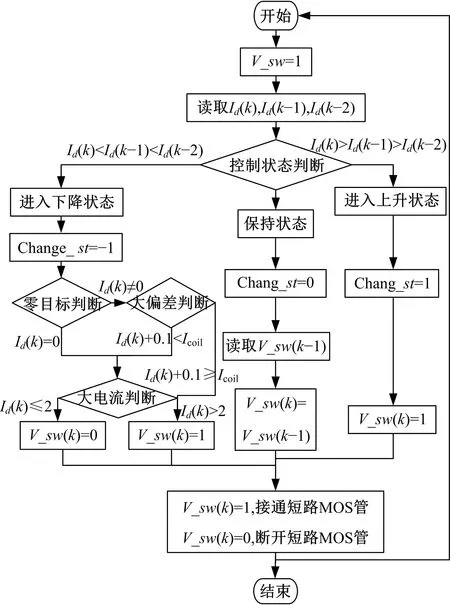
圖10 電流驅(qū)動器電阻切換程序Fig.10 Resistor switching program of current driver
4 硬件在環(huán)試驗
為了驗證設(shè)計的電流驅(qū)動器性能,使用以上設(shè)計的電流驅(qū)動器及控制算法進行懸架應(yīng)用場景的電流跟隨硬件在環(huán)試驗,硬件測試系統(tǒng)如圖11所示。
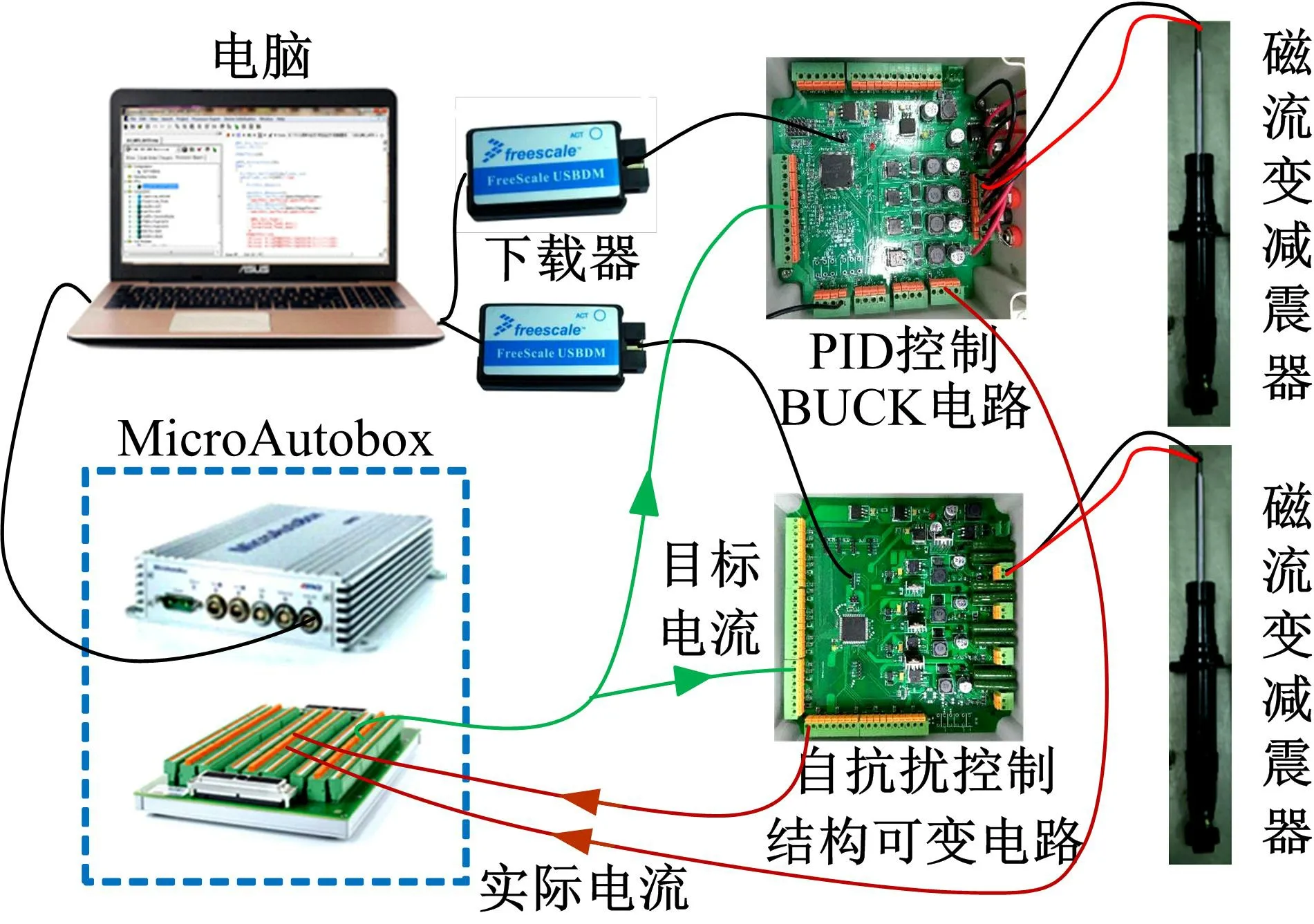
圖11 硬件在環(huán)測試系統(tǒng)Fig.11 Hardware-in-loop test system
使用1/4車輛懸架模型在C級路面,車速為60 km/h工況下進行天棚阻尼控制仿真,獲取減振器控制電流數(shù)據(jù)作為硬件在環(huán)試驗輸入。
獲得的控制電流數(shù)據(jù)由dSPACE/MicroAutobox以模擬電壓信號輸出給電流驅(qū)動器輸入端,由電流驅(qū)動器驅(qū)動磁流變減振器,并通過采樣電阻采集減振器實際電流。使用自抗擾控制器的變結(jié)構(gòu)電流驅(qū)動器的電流跟隨效果對比,如圖12所示。
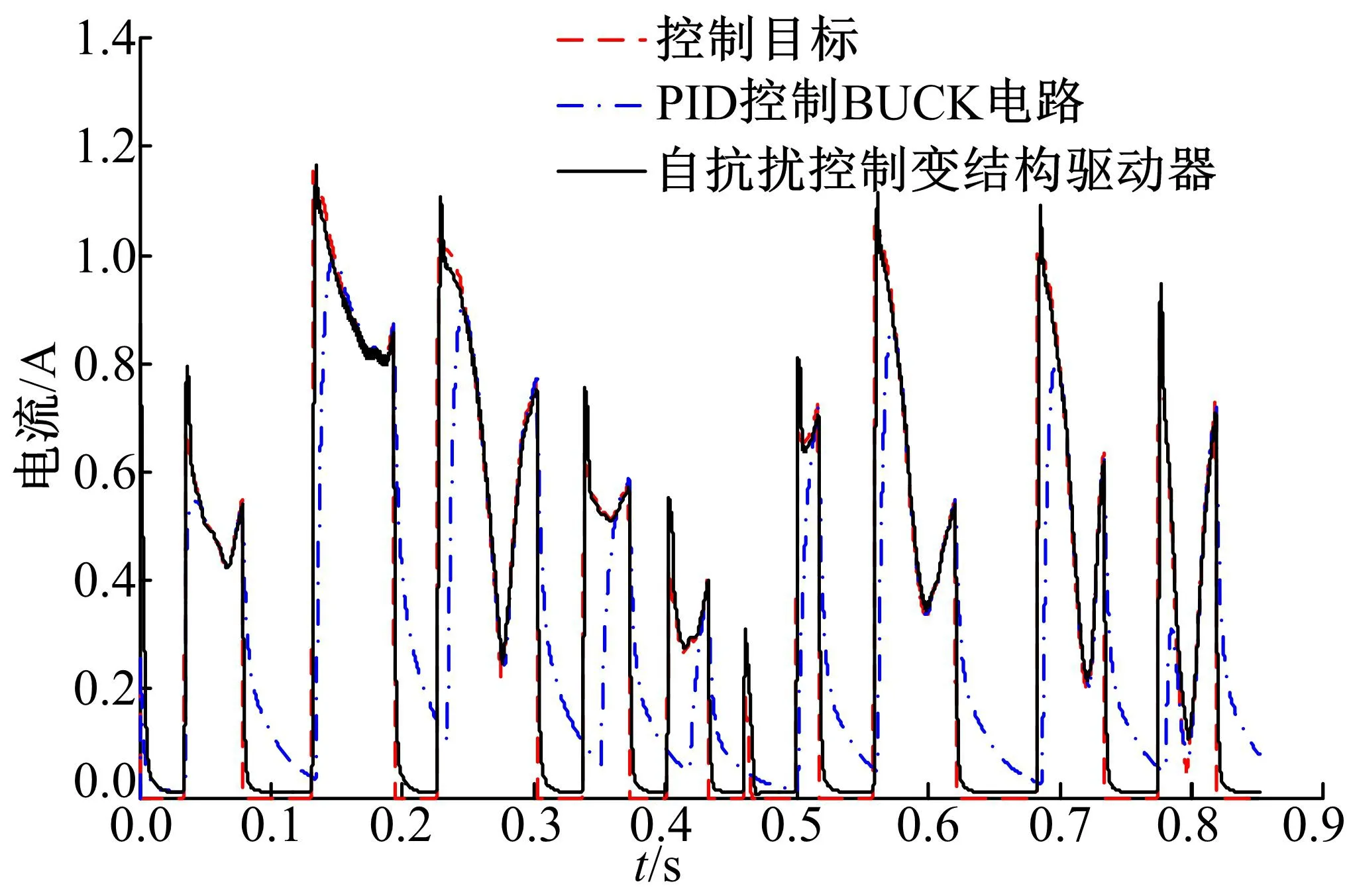
圖12 自抗擾控制變結(jié)構(gòu)電流驅(qū)動器電流跟隨效果Fig.12 Current following result of current driver with ADRC
試驗結(jié)果表明:相比BUCK驅(qū)動電路,電流驅(qū)動器可變結(jié)構(gòu)的引入使得減振器實際電流在控制目標(biāo)下降時可以更迅速跟隨上目標(biāo)電流。而對于控制目標(biāo)上升階段,在相同的控制頻率(10 kHz)下,使用自抗擾控制的變結(jié)構(gòu)電流驅(qū)動器可以有效減小減振器目標(biāo)電流調(diào)節(jié)的響應(yīng)時間并獲得更好的目標(biāo)跟隨效果。雖然在目標(biāo)電流突變時會產(chǎn)生少量的超調(diào),但處于電路安全使用范圍內(nèi)。
5 結(jié) 論
(1)文本提出的非線性二級線圈電路模型可以有效模擬磁流變減振器在典型工作情況下的動態(tài)響應(yīng)特性。
(2)減小線圈內(nèi)部互感,增大參數(shù)Rco或L2均可有效提高減振器驅(qū)動電路的響應(yīng)速度。
(3)使用自抗擾控制算法控制電流驅(qū)動器相比傳統(tǒng)PID可以有效抑制電流超調(diào)并減小系統(tǒng)參數(shù)波動造成的影響。
(4)硬件在環(huán)試驗證明,使用自抗擾控制變結(jié)構(gòu)電流驅(qū)動器相比PID控制的BUCK電路可以更好地跟隨目標(biāo)電流,更適用于磁流變半主動懸架。
參考文獻:
[1] Strecker Z, Roupec J, Mazurek I, et al. Limiting factors of the response time of the magnetorheological damper[J]. International Journal of Applied Electromagnetics & Mechanics,2015,47(2):541-550.
[2] Strecker Z,Roupec J,Mazurek I,et al. Design of magnetorheological damper with short time response[J]. Journal of Intelligent Material Systems & Structures,2015,26(14):1951-1958.
[4] Jiang Z S. Increasing resilience in civil structures using smart damping technology[D]. Connecticut: University of Connecticut, 2012.
[5] Yang G,Jung H J,Spencer B F,et al. Dynamic modeling of large-scale magnetorheological damper systems for civil engineering applications[J]. Journal of Engineering Mechanics,2004,130(9):1107-1114.
[6] Koo J H, Goncalves F D, Ahmadian M. A comprehensive analysis of the response time of MR dampers[J]. Smart Materials & Structures, 2006,15(2):351-358.
[7] 石志濤,張進秋,岳杰,等. 磁流變阻尼器的電流驅(qū)動器設(shè)計與實驗研究[J].機械與電子,2012(6):18-20.
Shi Zhi-tao,Zhang Jin-qiu,Yue Jie, et al. Study on design methodology of electric current driver for magneto-rheological fluid dampers[J]. Machinery & Electronics,2012(6):18-20.
[8] 周瑜. 某轎車車身姿態(tài)半主動懸架最優(yōu)控制研究[D]. 長春:吉林大學(xué)汽車工程學(xué)院,2016.
Zhou Yu. Research on the body attitude control of semi-active suspension vehicle using optimal control theory[D]. Changchun: College of Automotive Engineering,Jilin University,2016.
[9] Mohammad M N, Tadayoninejad A, Eghtesad M. An innovative design of fast current controller circuit foe MR dampers[J] .2nd International Conference on Control, Instrumentation and Automation, Shiraz,2011:1086-1090.
[10] 韓京清. 自抗擾控制技術(shù)[J]. 前沿科學(xué),2007,1(1):24-31.
Han Jing-qing, Auto disturbances rejection control technique[J]. Frontier Science,2007,1(1):24-31.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
工業(yè)設(shè)計(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(2020年2期)2020-06-02 11:29:24
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19