基于ARM和DSP處理器的無人搜救船船載控制系統設計
2018-02-18 10:31:12羅楚江李銳豪
裝備制造技術 2018年11期
羅楚江,李銳豪
(廣州航海學院,廣東 廣州510725)
0 引言
無人駕駛技術已經成功應用于飛機和汽車,如百度無人車和大疆無人機等產品已經得到深入研究和應用,但與無人車和無人飛機相比,無人船艇的發展相對處于落后狀態,智能化是當前船舶的發展方向,隨著人工智能、物聯網、高精度導航技術和動力定位技術的發展,無人駕駛船舶有了長足發展,無人船舶航行于全球將成為一種可能[1]。無人船作為水上搜救平臺有著廣泛的應用,以馬航MH370空難為例,海難搜救目標往往范圍廣、距離遠,大型救援船幾乎很難在事發兩小時黃金救援時間內找到現場。但若用飛機空投一批裝載救援物資的無人船,則可立即實現大面積拉網式搜索,一艘發現目標,其他船迅速靠近救援。無人船艇的關鍵技術是實現船舶在各種不同水文環境下的自主航行,在無人船平臺中,船載控制系統的主要功能是實現船舶運動狀態控制、環境信息采集與船岸通信的功能[2]。岸端監控系統的主要功能是對無人船的運行狀態、環境信息以及特定任務完成情況的顯示和記錄。
本文設計采用DSP和嵌入式ARM為平臺的船載控制系統和基于Android系統的遠程監控平臺,船載控制系統的主要是由動力驅動單元、信息采集單元、航行控制單元、視覺處理單元和通信單元組成,通過目標檢測技術和場景分割技術實現對落水人員的識別與定位,進而由無人船船載控制系統實現自動航行控制。船端與遠程監控平臺采用5.8 GHz無線通信技術實現數據交互,遠程監控平臺具有數據顯示與處理、人工遙控、自航設置以及地圖顯示等功能。
1 系統總體設計
無人搜救船系統由船載控制系統和遠程監控平臺兩大部分組成,系統的總體設計如圖1所示。系統采用2.4 G無線通信方式實現船端與遠程監控平臺之間信息交流,船端控制系統通過環境信息采集單元將無人搜救船的環境因素發送給遠程監控平臺進行顯示與處理,岸基遠程監控平臺可以實現對無人搜救船的遙控控制,由工作人員操縱無人船,亦可工作在自控模式,無人搜救船通過目標檢測技術實現對救助目標的定位,實現自航,自航速度等參數由遠程監控平臺設置。無人搜救船的航行軌跡可以在遠程監控平臺實時顯示。
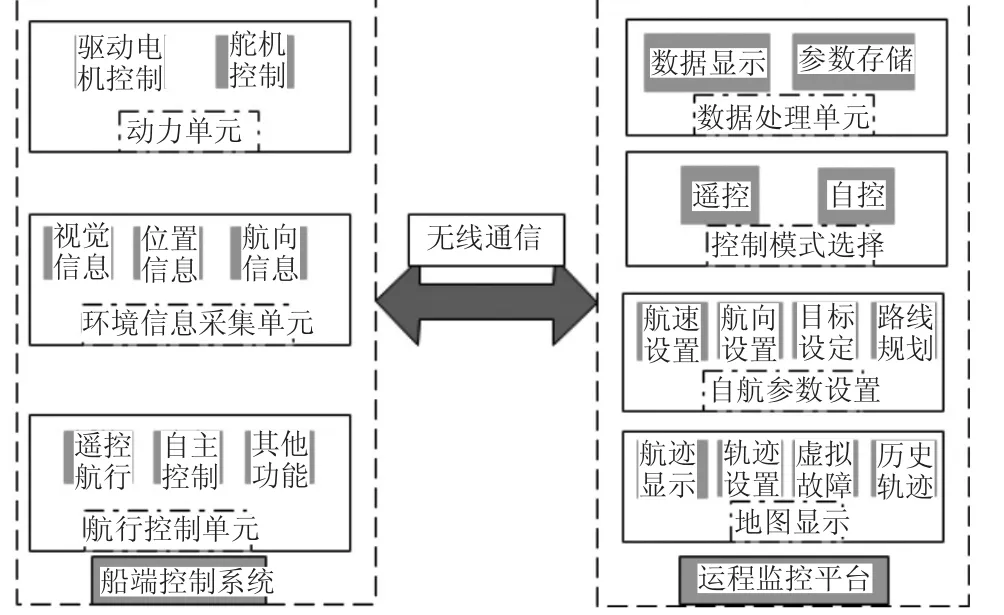
圖1 無人搜救船系統總體設計圖
2 船端控制系統硬件設計
無人搜救艇船端控制系統是無人搜救船的“執行者”,是無人搜救船智能控制的重要組成部分。設計以DSP和嵌入式STM32H7高速MCU實現對無人搜救船的動力控制、環境信息采集和航行控制等功能。船端控制系統設計框圖如圖2所示。
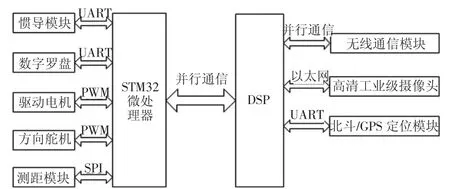
圖2 船載控制系統硬件結構圖
船載控制系統采用嵌入式STM32H743處理器和TMS320C6678多核固定浮點數字信號處理器。STM32H743是ST公司推出的高性能處理器,其工作頻率為400 MHz的32位ARM Cortex-M7微處理器[3],TMS320C6678是TI基于KeyStone的多核固定浮點數字信號處理器,集成了C66x CorePac,每個核心在1至1.5GHz到10GHz的運行,支持高性能的信號處理應用[4]。設計STM32用于無人搜救船的動力控制和航行控制,STM32輸出PWM分別控制電機的轉速與方向舵機的轉動角度,操縱無人搜救船的運動速度和運動方向。環境感知模塊是由測距模塊、高清工業級攝像頭和北斗/GPS定位模塊組成。航行控制單元用于控制無人搜救船的航行模式,可以選擇為自航模式或遙控模式,若為遙控模式,遠程監控平臺通過2.4 G無線通信將監控信息發送給無人搜救船。若為自控模式,遠程監控平臺對無人搜救船設定目標,由路徑規劃算法實現自航控制。
2.1 動力控制單元電路設計
無人搜救船的動力單元是由驅動電機和舵機共同構成,由于有刷直流電機價格便宜、控制簡單且穩定性高,故無人船的動力由有刷直流電機提供,通過L298N電機驅動芯片實現對有刷直流電機的驅動,其電機驅動電路如圖3所示。L298N是ST公司生產的一種高電壓、大電流電機驅動芯片,其持續工作電流為2 A,額定功率為25 W[5]。設計通過STM32高級定時器輸出PWM實現對驅動電機的控制。無人搜救船的運動方向由方向舵機來控制,設計亦是采用STM32高級定時器實現舵機轉角控制。
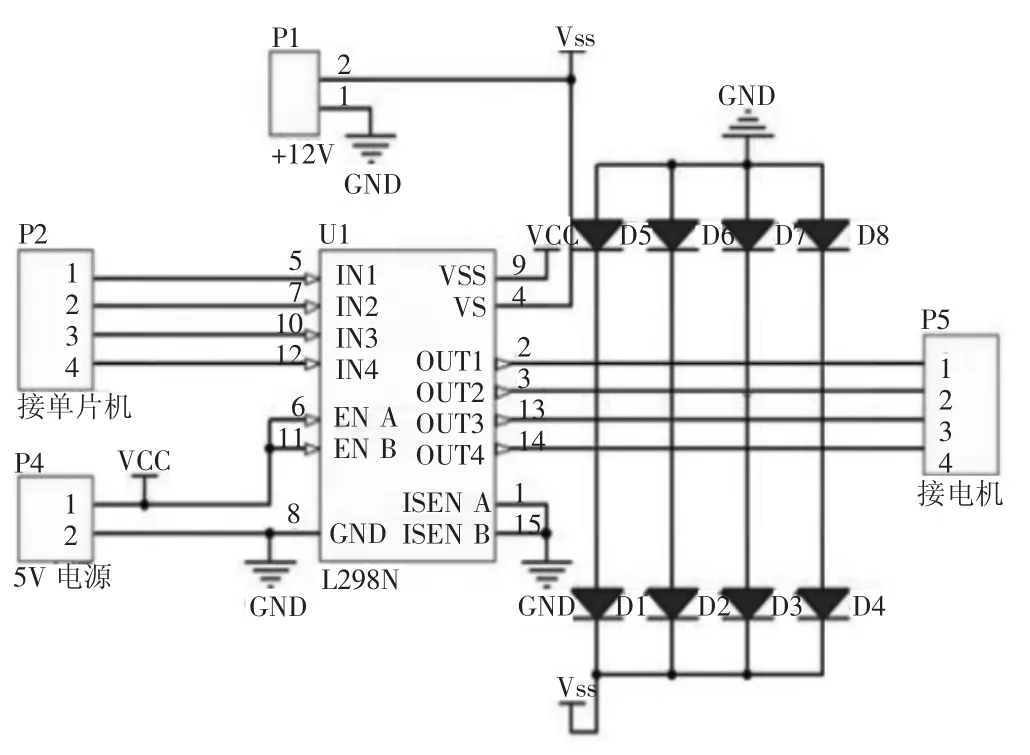
圖3 無刷直流電機驅動電路設計圖
2.2 環境信息采集單元電路設計
環境信息采集單元相當于無人搜救船的“眼睛”,通過高清工業攝像頭采集的信息,由DSP處理器實時處理,通過目標檢測算法,實現對落水人員的識別,并結合測距模塊、北斗定位模塊實現對落水人員的位置精確定位,由無線通信模塊將此信息發送到遠程監控平臺。攝像頭與DSP之間采用USB通信方式進行數據交互,從而保證高速數據通信的需求。北斗導航定位模塊采用SkyTra公司的GPS+北斗雙模定位芯片S1216F8-BD,,該芯片可實現米級精度的定位,定位模塊與DSP處理通過串口通信進行數據交換。定位模塊電路原理圖如圖4所示。
2.3 船岸無線通信模塊設計
為滿足無人搜救船與遠程監控平臺之間的通信,設計應用了工作在5.8 GHz頻段的高速無線通信模塊并配置高增益天線,以實現實時遠距離通信,該無線通信技術是基于城域網標準IEEE802.16a,支持點對點和點對多點的網絡結構,在無阻礙的情況下可以高達72Mbit/s的傳輸速率,最遠通信距離可達50 km,能夠滿足一般圖像或數據傳輸的要求。本設計采用SX1278半雙工低中頻收發器,該芯片的低頻段為169 M和433 M,高頻段為868M-915M,其電路原理圖如圖5所示。

圖4 定位模塊電路設計原理圖
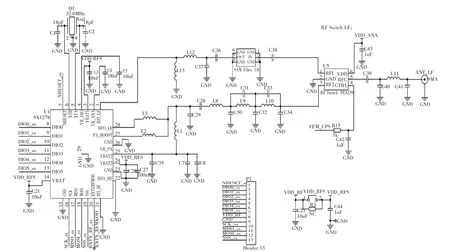
圖55 .8G無線通信設計原理圖
3 船載控制系統軟件設計
船載控制系統軟件的功能是控制STM32芯片和DSP芯片實現無人搜救船平臺監控功能,STM32微處理器使用MDK5.0集成編譯環境,DSP的開發環境為CCSV5.5.軟件功能的設計流程圖如圖6所示。

圖6 船載控制系統軟件設計流程圖
4 遠程監控軟件設計
為實現對無人搜救船的實時監控,設計采用基于Android系統的遠程監控平臺,遠程監控平臺設計了5.8 GHz通信模塊,與無人搜救船進行通信。遠程監控平臺設計界面如圖7所示。

圖7 遠程監控平臺界面圖
5 結論
本文設計了一種基于嵌入式ARM和DSP處理器的無人搜救船船載控制系統,船載控制系統由STM32H7和TMS320C6678DSP處理器、北斗/GPS定位模塊、動力模塊等組成,并采用5.8 GHz無線通信技術實現船載端與遠程監控平臺之間的信息交互,將無人搜救船的采集的環境信息、視頻信息以及控制信息傳輸到遠程監控平臺。無人船的控制分為自航和遙控模式,采用基于Android操作系統的遠程監控平臺,實現對無人搜救船的實時監控,可以提高無人船的工作效率,并確保航行安全,結合高清攝像頭及目標檢測技術,可用于水上搜救,具有一定的推廣價值。
猜你喜歡
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
中華手工(2017年2期)2017-06-06 23:00:31
Coco薇(2017年5期)2017-06-05 08:53:16
中外會展(2014年4期)2014-11-27 07:46:46
舒適廣告(2008年9期)2008-09-22 10:02:48
建筑創作(2001年3期)2001-08-22 18:48:14
祝您健康(1987年3期)1987-12-30 09:52:32