一種小型AGV運輸小車的設計
2018-02-18 01:17:22王書劍周詩薇鄧文兵方凱
中小企業(yè)管理與科技·上旬刊 2018年12期
王書劍 周詩薇 鄧文兵 方凱

【摘 要】在柔性制造業(yè)和自動化工廠中,自動導引運輸車(AGV)具有運輸效率高、節(jié)能、工作可靠、能實現(xiàn)柔性運輸?shù)仍S多優(yōu)點。論文設計一種小型AGV運輸小車,以32位微控制器MK60DN512VLQ10作為核心控制單元,采用電感線圈獲取道路信息,通過PID控制算法調(diào)節(jié)速度控制器和方向控制器,實時調(diào)整小車的自動導向與轉角。在柔性制造系統(tǒng)中,其可以提高生產(chǎn)自動化程度和生產(chǎn)效率,具有廣泛的應用前景。
【Abstract】In flexible manufacturing and automated plants, automatic guided transport vehicle (AGV) has many advantages, such as high transportation efficiency, energy saving, reliable work, flexible transportation and so on. The paper designs a small automated guided vehicle, which takes the 32-bit microcontroller MK60DN512VLQ10 as the core control unit, and adopts inductance coil to obtain the road information. The speed controller and the direction controller are adjusted by PID control algorithm, and the automatic steering and turning angle of the car are adjusted in real time. In the flexible manufacturing system, it can improve the degree of production automation and production efficiency, and has a wide application prospect.
【關鍵詞】自動導引小車;電磁檢測;路徑識別;單片機控制;PWM技術
【Keywords】automatic guided vehicle; electromagnetic testing; path identification; single chip microcomputer control; PWM technology
【中圖分類號】TP249? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ?【文獻標志碼】A? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ?【文章編號】1673-1069(2018)12-0176-02
1 引言
自動引導小車(AGV)是伴隨著柔性加工系統(tǒng)、柔性裝配系統(tǒng)、計算機集成制造系統(tǒng)、自動化立體倉庫而產(chǎn)生并發(fā)展起來的自動化物流裝備[1]。
隨著企業(yè)對于大型設備以及產(chǎn)品的物流運輸要求越來越嚴格,AGV的構造和功能也發(fā)生翻天覆地的變化。為了能夠滿足企業(yè)對于運輸大型設備以及產(chǎn)品的需求,需要一種重載式AGV。重載式AGV運輸小車有電磁或光學等自動導引裝置,它能夠沿規(guī)定的導引路徑行駛,具有安全保護以及各種移載功能的運輸車,相比普通的AGV小車更為實用[2]。
2 設計任務
本課題設計了一種小型重載AGV運輸小車,以32位微控制器MK60DN512VLQ10為核心控制單元,采用電感線圈獲取道路信息,通過設計PID速度控制器和PID方向控制器實時調(diào)整AGV運輸小車的自動導向與轉角。系統(tǒng)結構如圖1所示。
[智能車系統(tǒng)][硬件系統(tǒng)][軟件系統(tǒng)][電路系統(tǒng)][機械系統(tǒng)][機械系統(tǒng)][電路系統(tǒng)]
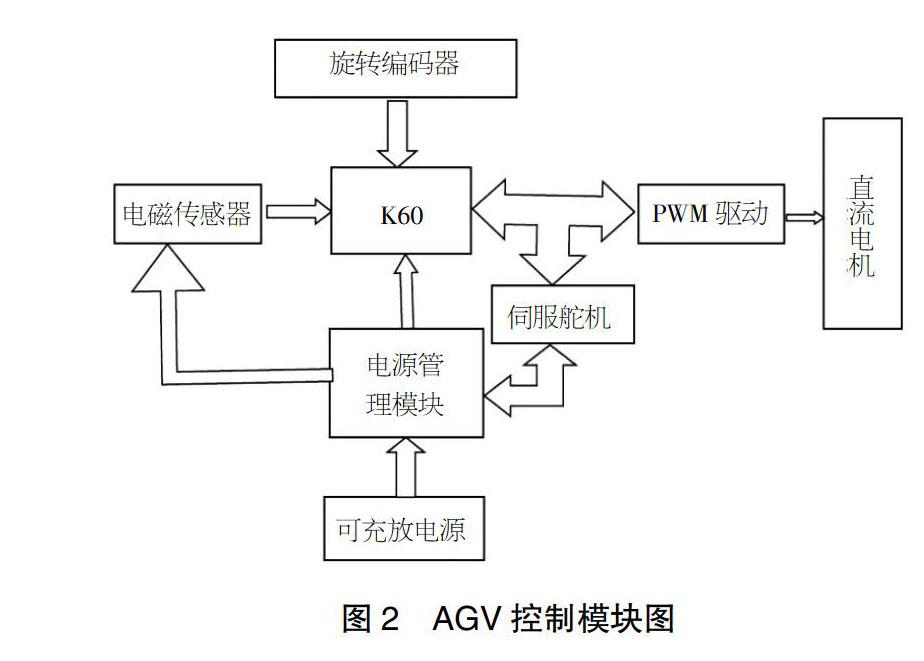
系統(tǒng)包括電磁傳感器導引模塊、核心控制K60模塊、驅動模塊、電源模塊。控制功能模塊如圖2所示。
3 AVG運輸小車的設計
3.1 控制系統(tǒng)
①電磁傳感器導引模塊:選用三極管和LM324芯片進行兩級放大,在該模塊中對采集到的信息進行處理,以此信息來判斷當前AVG運輸小車行車路徑的變化趨勢和AVG運輸小車當前速度轉角的信息[3]。將處理得到的信息傳給單片機以決定相應控制決策。②核心控制K60模塊:K60單片機是系統(tǒng)的核心部分。它負責接收行車路徑信息數(shù)據(jù),AGV運輸小車的速度等反饋信息,并對這些信息進行恰當?shù)奶幚恚纬珊线m的控制量來驅動電機進行控制。③驅動模塊:在該模塊中包括了驅動電機和舵機,當接收到單片機的命令后執(zhí)行相應的操作,同時信息采集模塊又采集到電機和舵機的狀態(tài)信息,反饋給單片機[4]。從而整個系統(tǒng)能夠形成一個閉環(huán),保證了AGV運輸小車的準確導引。④ 電源模塊:提供AVG小車運行中各個部件的動力。
3.2 機械平臺
AVG運輸小車的機械結構包括AVG運輸小車車體、電磁導引傳感器、編碼器、舵機和電機。
①電磁傳感器。電磁傳感器主要考慮的問題有:固定電磁傳感器的材料,安裝位置和安裝高度[5]。固定材料選擇了硬度較好而且使用靈活的三通塑料連件。安裝位置剛開始我們把傳感器支架固定在車的前半部分,導致傳感器支架擺動在高速是晃動,并使得小車重心靠前。經(jīng)過多次反復的實驗最終確定了傳感器離地面的高度為11cm,支架固定在車體的后部。? ②速度編碼器。采用龍邱編碼器,安裝時應注意調(diào)整好齒輪間隙。齒輪傳動機構對車模的驅動能力有很大的影響。齒輪傳動部分安裝位置的不恰當,會大大增加電機驅動后輪的負載。調(diào)整的原則是:兩傳動齒輪軸保持平行,齒輪間的配合間隙要合適,過松容易打壞齒輪,過緊又會增加傳動阻力,浪費動力;傳動部分要輕松、順暢,不能有遲滯或周期性振動的現(xiàn)象。判斷齒輪傳動是否良好的依據(jù)是,聽一下電機帶動后輪空轉時的聲音。聲音刺耳響亮,說明齒輪間的配合間隙過大,傳動中有撞齒現(xiàn)象;聲音悶而且有遲滯,則說明齒輪間的配合間隙過小,或者兩齒輪軸不平行,電機負載變大。調(diào)整好的齒輪傳動噪音很小,并且不會有碰撞類的雜音,后輪減速齒輪機構就基本上調(diào)整好了。③小車車體。小車車體設計中,關鍵是重心的調(diào)整,包括重心高度的調(diào)整和前后的調(diào)整。重心的高度是影響小型重載AGV運輸小車穩(wěn)定性的因素之一。當重心高度偏高時,AGV運輸小車在轉彎過程中會不穩(wěn)定。合理的底盤剛度和底盤高度調(diào)節(jié)會提高小型重載AGV運輸小車的加速性能。AGV運輸小車的重心應該保持較低,降低地盤是實現(xiàn)重心下降的較為直接的方式[6]。
3.3 程序設計
軟件設計需要配置單片機各個模塊寄存器數(shù)值,使單片機各個模塊正常工作。初始化中包括:單片機時鐘配置、I/O口配置、PWM模塊配置、A/D模塊配置、PIT實時中斷配置、脈沖捕捉模塊配置[7]。當初始化完畢后,開始對傳感器輸入信號進行采樣,當完成一次采樣后將采樣值輸入控制算法,控制算法經(jīng)過PID調(diào)節(jié),得到實際控制的電機速度,通過改變PWM模塊內(nèi)部寄存器數(shù)值可以得到不同占空比的方波信號,實現(xiàn)電機的調(diào)節(jié)與控制。
4 結論
本課題設計了小型重載AGV運輸小車,是以微控制器為控制核心、蓄電池為動力、裝有非接觸導引裝置的無人駕駛自動導引運輸車,其自動作業(yè)的基本功能是導向行駛、認址停準和移交載荷。作為物流處理自動化的有效手段和柔性制造系統(tǒng)的關鍵設備,AGV自動導引小車系統(tǒng)結構一般由機械部分、控制部分以及信息處理部分構成。本設計實現(xiàn)了小車自動按設定的軌跡行走,能夠在柔性制造系統(tǒng)中自動運輸工件。
【參考文獻】
【1】李銘.小型重載 AGV的設計與實驗研究[D].西安: 西安理工大學, 2009.
【2】楊東軒,王嵩.ARMCortex-M4自學筆記:基KinetisK60[M].北京:北京航空航天大學出版社,2013.
【3】譚建成.電機控制專用集成電路[M].北京:機械工業(yè)出版社,1997.
【4】周文軍, 吳有明.基于AGV和工業(yè)機器人的智能搬運小車的研究[J]. 裝備制造技術, 2016(11):89.
【5】賀美華, 廖敏, 公茂震,等.裝配型重載全向移動AGV控制系統(tǒng)[J]. 自動化技術與應用, 2018(2):66.
【6】盧敬銘.重載倉儲自動引導車底盤的設計實現(xiàn)[D]. 廣州:華南理工大學, 2017.
【7】賀修好,周威,方凱.一種模塊化可變形搜救機器人的設計[J].卷宗,2015(5):88.
