田口方法汽車平順性分析與穩(wěn)健優(yōu)化
2018-02-20 12:08:48胡啟國楊晨光
噪聲與振動控制 2018年6期
胡啟國,楊晨光
(重慶交通大學(xué) 機電與車輛工程學(xué)院,重慶 400074)
汽車的平順性主要是保證汽車在行駛過程中產(chǎn)生的振動和沖擊環(huán)境對乘員舒適性的影響在一定界限之內(nèi)[1]。懸架是影響汽車平順性的主要因素,眾多專家學(xué)者從事懸架系統(tǒng)的研究、優(yōu)化與控制工作,使汽車平順性得到不斷地提高。文獻[2]考慮了簧上質(zhì)量變化、執(zhí)行機構(gòu)延遲等因素,設(shè)計了一個可靠的模糊H∞控制器,并采用四分之一車輛懸架模型驗證了設(shè)計方法的有效性。文獻[3]應(yīng)用改進的多目標(biāo)遺傳算法優(yōu)化了某種油氣懸架的參數(shù)。文獻[4]結(jié)合蒙特卡羅方法和6σ穩(wěn)健性優(yōu)化技術(shù),對懸架參數(shù)進行多目標(biāo)穩(wěn)健性優(yōu)化,改善了設(shè)計變量在最優(yōu)解附近波動而引起平順性變差的狀況。但是,這些優(yōu)化都將路面、載荷和車速等因素視為不變的,沒有考慮隨機干擾因素對汽車平順性的影響,因而不能保證汽車平順性在復(fù)雜工況下的穩(wěn)健性。文獻[5]將試驗設(shè)計、穩(wěn)健性理論和田口魯棒設(shè)計方法相結(jié)合,構(gòu)造了汽車耐撞性的穩(wěn)健性優(yōu)化設(shè)計方法,在獲得近似最優(yōu)解的同時,較大幅度提高了產(chǎn)品的穩(wěn)健性。
田口方法是一種聚焦于最小化過程變異或使產(chǎn)品、過程對環(huán)境變異最不敏感的實驗設(shè)計方法。本文考慮懸架參數(shù)、座椅參數(shù)等可控設(shè)計變量和路面、載荷、車速等隨機干擾因素對汽車平順性的影響,將仿真分析與田口方法相結(jié)合,分析了各可控設(shè)計變量與隨機干擾因素對平順性的影響,并優(yōu)選出最佳參數(shù)組合,提高了整車平順性及其穩(wěn)健性。
1 路面激勵模型
車輛振動的輸入路面不平度主要采用路面功率譜密度來描述其特性[6]。這里采用濾波白噪聲法建立路面激勵時域模型,其單輪路面激勵q(t)的時域模型為[7]
式中:n∞為路面空間截止頻率,n∞=0.011 m-1;u為汽車行駛速度;n0為參考空間頻率,Gq(n0)為路面不平度的幾何平均值;n0=0.1 m-1;ω(t)為均值為0的單位白噪聲隨機信號。
同側(cè)前后車輪所受激勵存在遲滯性,單輪轍激勵模型為[8]
式中:α為與路面等級相關(guān)的路面常數(shù);q1、q2分別為汽車同側(cè)前、后車輪的路面激勵;l為汽車前后軸的距離;Δ為前后車輪路面激勵的輸入延遲,Δ=l/u。
左右兩側(cè)車輪軌跡具有異轍相干性,假設(shè)左、右兩側(cè)輪轍的白噪聲輸入ξ分別為ξx、ξy,則兩側(cè)輪轍相干性方程為

右側(cè)輪轍白噪聲輸入模型為

式中:a0、a1、a2、b0、b1、b2為道路品質(zhì)常數(shù),a0=3.181 5、a1=0.206 3、a2=0.010 8、b0=3.223、b1=0.59、b2=0.032 7;x1、x2為中間狀態(tài)變量[9]。
本文所研究的汽車主要行駛在A級、B級和C級路面。對于A級、B級和C級路面,其路面不平度的幾何平均值Gq(n0)和路面常數(shù)α的數(shù)值如表1所示。
以B級道路路面不平度作為車輪激勵,取車速為u=20 m/s,在MATLAB/Simulink中進行仿真實驗,得到汽車4輪所受路面隨機激勵如圖1所示。

表1 路面參數(shù)Gq(n0)與α的取值

圖1 汽車4輪所受B級路面隨機激勵
2 整車平順性模型及仿真
2.1 動力學(xué)模型
經(jīng)過合理簡化,建立8自由度整車動力學(xué)模型如圖2所示。該模型中,車身被簡化為剛體,有質(zhì)心的垂直位移(Zc)、側(cè)傾角(Φ)和俯仰角(θ)3個自由度、駕駛員座椅垂直位移(Zs)1個自由度,4個非簧載質(zhì)量分別具有1個垂直位移(Z1、Z2、Z3、Z4)自由度。

圖2 整車8自由度振動動力學(xué)模型示意圖
取系統(tǒng)的廣義坐標(biāo)為

由拉格朗日方程和達朗貝爾原理,可得8自由度整車平順性模型振動微分方程為

式中:M為8×8階的系統(tǒng)質(zhì)量矩陣;C為8×8階的系統(tǒng)阻尼矩陣;K為8×8階的系統(tǒng)剛度矩陣;Kt為8×4階的輪胎剛度矩陣;Q為4×1階的路面激勵矩陣;Z為8×1階的位移矩陣。
2.2 仿真分析
本文所研究汽車的動力學(xué)參數(shù)說明及取值見表2。

表2 汽車動力學(xué)參數(shù)說明及取值
利用MATLAB/Simulink進行仿真實驗,模擬該車在C級路面、空載狀況下以25 m/s的速度勻速行駛時的整車振動狀況,得到駕駛員座椅垂向加速度隨時間變化的曲線如圖3所示。

圖3 座椅垂向振動加速度圖
在MATLAB中計算得到座椅垂向加速度均方根值為0.605 7 m/s2,根據(jù)文獻[10]提供的垂向加速度均方根值與人主觀感覺之間的關(guān)系可知,對于所研究車型,駕駛員的舒適性不夠好,需要進行平順性優(yōu)化。
3 田口方法實驗及穩(wěn)健優(yōu)化
田口方法實驗是基于損失模型的穩(wěn)健優(yōu)化設(shè)計實驗,其原理是利用設(shè)計參數(shù)和響應(yīng)之間的非線性關(guān)系來實現(xiàn)產(chǎn)品的穩(wěn)健性,其目的是尋找可控因素的最佳組合,使得噪聲因素的影響盡可能小。田口方法的基本工具是信噪比和正交表;正交實驗設(shè)計方法只需要做少數(shù)試驗就能全面反映出試驗條件完全組合的內(nèi)在規(guī)律,以確定參數(shù)的最佳組合,可以縮短設(shè)計時間,提高設(shè)計效率[11]。
3.1 內(nèi)外正交表的設(shè)計
懸架及座椅的動力學(xué)參數(shù)對汽車乘坐舒適性的影響較為明顯。因此,這里選取前后懸架的剛度、阻尼和駕駛員座椅的剛度、阻尼作為6個可控因子。
該車型前懸架偏頻范圍為1.00 Hz~1.45 Hz,后懸架偏頻范圍為1.17 Hz~1.58 Hz。結(jié)合已知參數(shù),可以計算出懸架參數(shù)的取值范圍。為了詳細分析可控因子各水平的影響,每個因子均選擇5種水平,如表3所示。其中,水平3指該車初始設(shè)計參數(shù)值,其余水平對應(yīng)的值分別為初始值的倍數(shù)。根據(jù)可控因子個數(shù)及其水平數(shù),選取L25(56)正交表為內(nèi)表。

表3 可控因子水平表
依據(jù)汽車平順性的外界影響因素分析,選取路面等級、載荷和車速為3個噪聲因子,其水平的選擇根據(jù)該車型的常態(tài)行駛環(huán)境來確定,如表4所示。根據(jù)噪聲因子的個數(shù)及其水平數(shù),選取L9(33)正交表為外表。

表4 噪聲因子水平表
3.2 信噪比
汽車平順性的客觀評價常以座椅的垂向加速度均方根值作為指標(biāo)。這里以懸架動撓度和輪胎動載荷為約束條件,以駕駛員座椅的垂向加速度均方根值最小為優(yōu)化目標(biāo),其值越小,汽車平順性越好。
田口穩(wěn)健設(shè)計要求目標(biāo)函數(shù)及其在噪聲因素干擾下的波動值越小越好。考慮望小特性,基于損失函數(shù)法的信噪比為[12]

式中:yi為對應(yīng)的目標(biāo)函數(shù)響應(yīng)值。
3.3 實驗結(jié)果分析
田口方法中,內(nèi)正交表是可控因子各水平組合的安排,外正交表是噪聲因子各水平組合的安排,由內(nèi)外正交表的設(shè)計得到正交表的表頭。在MATLAB/Simulink中對各種可控因子與噪聲因子的組合依次進行仿真實驗,得到座椅垂向振動加速度圖,編程算出座椅垂向加速度均方根值(單位:mm/s2),并計算各可控因子組合下的響應(yīng)均值和信噪比,得到實驗結(jié)果如表5所示。
對表5的數(shù)據(jù)進行統(tǒng)計學(xué)分析與計算,得到信噪比的方差分析表,如表6所示。通過貢獻率的計算,可以得出各可控因子對平順性及其穩(wěn)健性的影響程度。
由表6可知:各可控因子中,前懸架剛度對該車平順性及其穩(wěn)健性的貢獻率最高,達到71.11%;后懸架剛度次之,為10.26%;前、后懸架的阻尼和座椅的剛度、阻尼對應(yīng)的貢獻率較小。因此,對于該車型,懸架的剛度對汽車平順性影響顯著,其設(shè)計與加工精度應(yīng)著重考慮。
噪聲因子的影響趨勢如表7所示。由表7可知:汽車平順性隨路面不平度的增加而變差,隨載荷的增加而改善,隨速度的加快而變差。各噪聲因子對汽車平順性的影響程度由高到低依次為:路面、車速、載荷。
3.4 優(yōu)化結(jié)果分析
穩(wěn)健優(yōu)化前后各可控因子的水平值及汽車在以上9種工況下的座椅垂向加速度均方根值(單位:mm/s2)如表8所示。由表8可知:優(yōu)化后,汽車駕駛員座椅的垂向加速度均方根值在以上9種噪聲因子的組合工況下均有所減小,其變化范圍和均值均變小,其中,均值由345.1下降至267.9,減小了22.37%;信噪比變大;說明駕駛員座椅的舒適性顯著提升,且其隨噪聲因子變化的波動范圍變小,即提高了汽車的平順性及其穩(wěn)健性。

表5 田口方法實驗正交表

表6 信噪比方差分析表
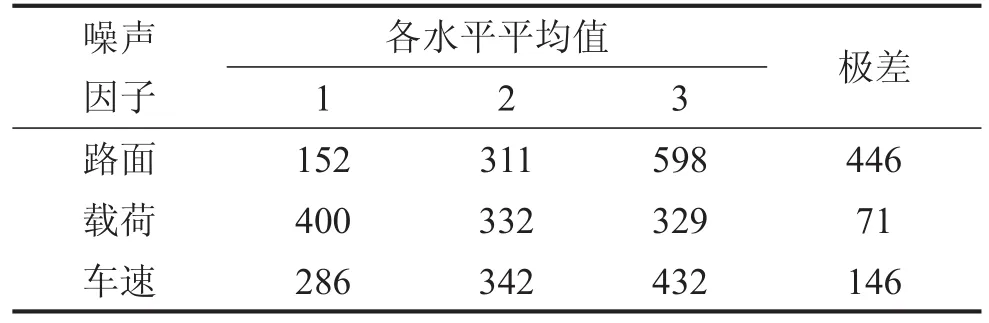
表7 噪聲因子反應(yīng)表 單位:mm/s2
仿真實驗結(jié)果顯示:汽車各輪胎相對動載荷與各懸架動行程于優(yōu)化前后的反應(yīng)具有一致性。在以上9種工況下,右后輪相對動載荷均方根值gi與右后懸架動行程均方根值fi(單位:mm)如表9所示。
由表9可知:優(yōu)化后,右后懸架動行程均方根值與右后輪相對動載荷均方根值在各工況下均減小,汽車操縱穩(wěn)定性提升。信噪比增大,說明懸架動行程與輪胎相對動載荷在各工況下的波動范圍也變小,汽車操縱穩(wěn)定性的穩(wěn)健性也有所提高。由此,驗證了田口方法汽車平順性分析與穩(wěn)健優(yōu)化的可行性。

表8 優(yōu)化前后可控因子水平及響應(yīng)分析

表9 優(yōu)化前后汽車操縱穩(wěn)定性分析
4 結(jié)語
(1)建立了8自由度整車平順性模型,利用MATLAB/Simulink進行仿真實驗,分析駕駛員座椅的乘坐舒適性,指出了所研究汽車平順性的不足。
(2)通過田口方法試驗,分析了汽車動力學(xué)參數(shù)變化與外界隨機不可控因素對汽車平順性的影響;優(yōu)選出了汽車動力學(xué)參數(shù)的最佳水平組合,提高了汽車的操縱穩(wěn)定性、平順性及其穩(wěn)健性。
(3)分析了懸架和座椅的動力學(xué)參數(shù)對汽車舒適性的影響和貢獻率,為汽車的設(shè)計與生產(chǎn)標(biāo)準(zhǔn)提供了理論依據(jù)。本文的研究方法對汽車的振動、噪聲等其它方面的研究具有一定的借鑒意義。
猜你喜歡
房地產(chǎn)導(dǎo)刊(2022年5期)2022-06-01 06:20:14
建材發(fā)展導(dǎo)向(2021年12期)2021-07-22 08:06:48
建材發(fā)展導(dǎo)向(2021年7期)2021-07-16 07:07:52
中學(xué)生數(shù)理化(高中版.高二數(shù)學(xué))(2021年12期)2021-04-26 07:43:48
中學(xué)生數(shù)理化(高中版.高考數(shù)學(xué))(2021年12期)2021-03-08 01:28:50
汽車與安全(2019年9期)2019-11-22 09:48:03
兒童時代·快樂苗苗(2017年7期)2018-01-24 18:28:45
作文大王·低年級(2016年4期)2016-04-18 00:24:37
現(xiàn)代企業(yè)(2015年2期)2015-02-28 18:45:09
決策探索(2014年21期)2014-11-25 12:29:50
