并聯雙向偏轉工作臺的動力學仿真與分析
2018-02-20 06:26:54陳周陳純
現代制造技術與裝備 2018年12期
關鍵詞:方向
陳 周 陳 純
(陜西理工大學 機械工程學院,漢中 723000)
并聯機構結構的高復雜性,導致其動力學模型系統具備非線性、多自由度和多參數耦合的特點,是研究并聯機構動力學的一個重點和難點。本文對一種并聯雙向偏轉工作臺并聯機構進行了分析,并基于Lagrange法對該并聯機構進行了動力學方程的建立,同時利用admas軟件對該機構進行了動力學仿真,為該機構實際應用與分析提供了力學研究支持。
1 雙向偏轉工作臺并聯機構簡介
該雙向偏轉工作臺內、外齒輪拱,各由一個獨立固定在底座上的電機進行驅動,外齒輪拱通過銷軸直接連接在臺面下的銷軸座上,但如果內、外齒輪拱均用普通的銷軸與工作臺連接,則無法實現兩個方向齒輪同時轉動且互不干擾的。假如X方向(外齒輪拱轉動方向)上發生45°轉動時,Y方向(內齒輪拱轉動方向)上的轉動軸就從原來的水平角度轉軸變成了現在的45°轉軸,如果要圍繞此軸轉動,Y方向的轉動方向必須與此45°轉軸垂直,然而此時Y方向的轉動軸仍然是原來的水平方向的轉動軸,兩者發生沖突。因此為了能滿足內外齒輪同時轉動功能,現對內齒輪拱與工作臺臺面的連接方式進行優化,采用U形孔及銷軸的搭配設計,該優化原理類似于萬向節轉動原理,保持兩個方向上的轉軸始終垂直。此并聯雙向偏轉工作臺運動學逆解如式(1)、式(2)所示。

正解如式(3)、式(4)所示
式中,Z1為驅動外齒輪拱電機上的消隙齒輪齒數;Z2為外齒輪拱齒數;Z3為驅動內齒輪拱電機上的消隙齒輪齒數;Z4為內齒輪拱齒數;β1為基于電機轉動角度的外齒輪拱偏轉角度;β2為驅動外齒輪拱電機轉動角度;γ1為基于電機轉動角度的內齒輪拱偏轉角度;γ2為驅動內齒輪拱電機轉動角度。
2 廣義力
由于該機構含有兩個轉動自由度,因此用沿內、外齒輪拱轉動方向轉動的廣義坐標qk(k=1,2)來描述該工作臺的運動.為求在廣義坐標qk下的廣義力Qk,先假設qk不為零,而其它的2個廣義坐標為零,如式(5)所示。

式中,F為機構所受的外力;Δr為動平臺中心的虛位移;G0為動平臺質量;Fk為齒輪拱的驅動力。式(5)兩邊同除以Δqk可得Qk,如式(6)所示。

將式(6)寫成矩陣形式,如式(7)所示。

式中,J為Jacobian矩陣。
3 基于Lagrange方法的動力學方程的建立
該雙向偏轉工作臺機構的動能,由動平臺動能和內外兩個齒輪拱兩部分組成,具體表達式如式(8)所示。
式中,m0為工作臺平臺質量;rt為平臺到轉軸的垂直距離;ωr為平臺轉動角速度;mk為齒輪拱及其導軌副質量;rk為齒輪拱到其轉軸的垂直距離;ωk為齒輪拱轉動角速度。將(8)式兩邊對qk求導,如式(9)所示。

將式(9)對時間t進行求導,如式(10)所示。

式中,α為動平臺的角加速度;αk為齒輪拱角加速度。將式(7)~式(9)帶入Lagrange方程,如式(11)所示。

可得計算結果,如式(12)所示。

通過式(12)可以得到內外齒輪拱驅動力的大小,并對該機構進行動態特性的分析。
4 并聯雙向偏轉工作臺機構的admas動力學仿真
先將并聯雙向偏轉工作臺模型導入admas軟件之中,并加上各約束后,如圖1所示。
因為兩個消隙齒輪是直接安裝在電機上的,所以當工作臺面加荷載后,測試電機最小驅動力或工作扭矩,可以直接測兩消隙齒輪的驅動力或工作扭矩。測得消隙齒輪驅動力與平臺加入的荷載關系,如圖2所示。
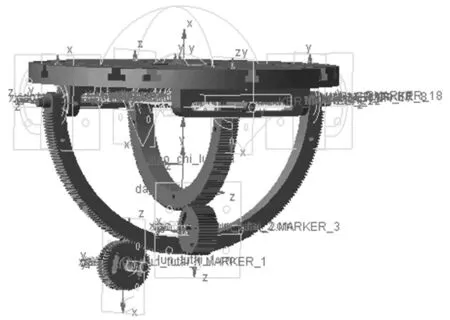
圖1 導入admas中的模型圖
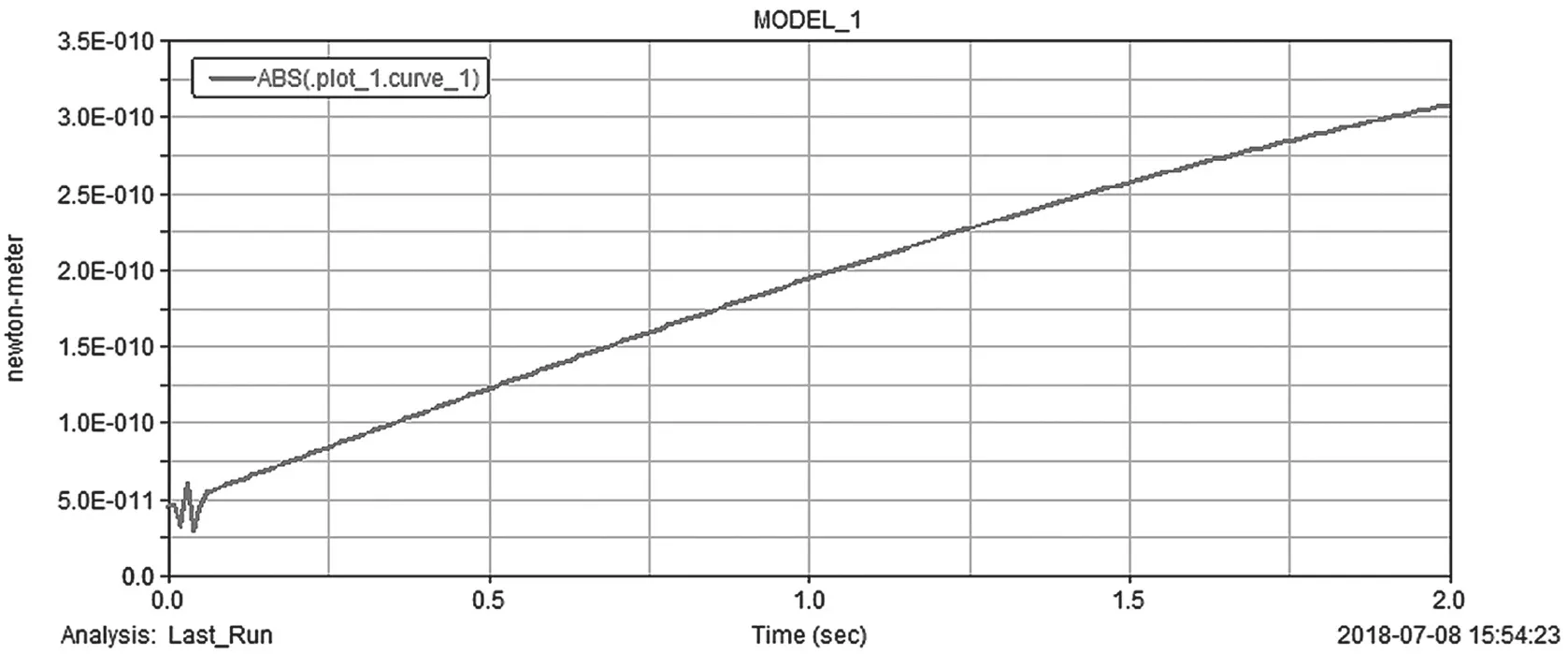
圖2 消隙齒輪驅動力隨運動時間變化圖
如圖(2)所示,當該并聯雙向偏轉工作臺從初始水平位置開始運動后,隨著工作臺的偏轉,工作臺勢能變大,內、外兩驅動電機提供的扭矩也逐漸增大。
5 結語
利用Lagrange方程對該并聯雙向偏轉工作臺進行了動力學模型構建和動力學分析,得到了該工作臺中兩個驅動電機驅動力的顯示解。再利用admas軟件對該工作臺模型進行了動力學仿真與分析,測得了工作臺加載荷載情況下,內、外兩個驅動電機扭矩隨偏轉運動時間變化的關系圖。
猜你喜歡
計算機應用(2023年1期)2023-02-03 03:09:28
音樂天地(音樂創作版)(2022年10期)2023-01-13 05:47:42
湘潮(上半月)(2022年5期)2022-12-06 03:02:28
計算機應用(2022年2期)2022-03-01 12:33:42
計算機應用(2022年1期)2022-02-26 06:57:42
計算機應用(2021年4期)2021-04-20 14:06:36
數學小靈通(1-2年級)(2021年3期)2021-04-13 01:01:58
計算機應用(2021年3期)2021-03-18 13:44:48
計算機應用(2021年1期)2021-01-21 03:22:38
數學小靈通·3-4年級(2017年11期)2017-11-29 01:35:50
