基于多旋翼無人機的復合絕緣子檢測平臺研究
2018-02-23 15:01:06王身麗,黃力,候金華,張學鋒,劉曉華,胡川,陳典麗,覃喬
科技創新與應用 2018年6期
王身麗,黃力,候金華,張學鋒,劉曉華,胡川,陳典麗,覃喬
摘 要:傳統的復合絕緣子憎水性檢測采用人工帶電作業方式,不僅耗時費力,而且存在一定的安全隱患,為此文章設計了一種基于多旋翼無人機的憎水性檢測平臺。它以多旋翼無人機為搭載平臺,集高壓霧化自動噴水和實時視頻傳輸于一體的搭載裝置,利用無人機搭載的微型數碼運動攝像機和圖像傳輸設備對復合絕緣子進行拍攝和實時傳送,通過研發的憎水性能自動判定軟件對拍攝圖片進行處理,提高了檢測的效率和準確性,實現了復合絕緣子憎水性等級的智能判斷。
關鍵詞:多旋翼無人機;復合絕緣子;憎水性
中圖分類號:TM216 文獻標志碼:A 文章編號:2095-2945(2018)06-0010-03
Abstract: The traditional composite insulator hydrophobicity detection adopts artificial live operation, which not only takes time and effort, but also has certain safety hidden trouble. Therefore, a hydrophobicity detection platform based on multi-rotor UAV is designed in this paper. It takes the multi-rotor UAV as the carrying platform, and integrates the high-pressure atomization automatic water spray and the real-time video transmission in one carrying device. The composite insulator is photographed and transmitted in real time using the micro digital motion camera and image transmission equipment of UAV, and the pictures are processed by the hydrophobicity automatic determination software developed by the research and development. The efficiency and accuracy of the detection are improved, and the intelligent judgment of the hydrophobicity grade of composite insulator is realized.
Keywords: multi-rotor UAV; composite insulator; hydrophobicity
1 概述
隨著近些年國內外無人機產業的高速發展,以無人機作為搭載平臺搭載各式各樣的任務設備越來越普及。其中,無人機應用在超高壓輸電線路工程上,作為憎水性試驗裝置的搭載平臺,用來進行絕緣子憎水性試驗,成為熱點研究問題。使用無人機搭載絕緣子憎水性檢測噴水裝置不僅可以在線路帶電情況下進行試驗,更可以取代人工爬塔作業,這種方法較傳統方法更為安全、優質、高效[1]。
2016年8月南方電網超高壓輸電公司廣州局進行過憎水性檢測方法的研究,其采用的噴射機構簡單,方向固定,且圖像處理軟件仍有提升空間。因此,本文擬以多旋翼無人機為搭載平臺,研制集高壓霧化自動噴水和實時視頻傳輸于一體的搭載裝置,應用大數據分析和圖像識別技術,研發復合絕緣子憎水性自動判定軟件,實現了復合絕緣子憎水性等級的智能判斷。
2 檢測平臺的總體設計
利用多旋翼無人機的復合絕緣子檢測平臺是以無人機作為裝置載體,通過可控制霧化噴射水霧方向的模塊,再由高清相機獲取在復合絕緣子表面水珠/水跡形態的一個裝置。
整個設計過程可以分解為以下幾個主要部分:整體裝置與載體之間的連接方式的設計;可控制方向的噴射系統設計;高清相機的選型和控制系統設計。
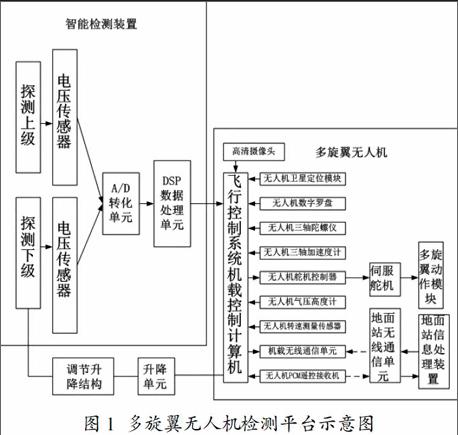
如圖1所示,多旋翼無人機檢測絕緣子裝置包括多旋翼無人機、絕緣子檢測裝置和升降結構。絕緣子檢測裝置包括探測上極和探測下極,分別連接電壓傳感器,通過A/D轉化單元將信號輸入DSP處理單元進行數據處理,DSP處理單元輸入端與多旋翼無人機的飛行控制系統機載控制計算機連接。多旋翼無人機包括飛行控制系統機載控制計算機,與其相連的有衛星定位模塊、數字羅盤、三軸陀螺儀、三軸加速度計、舵機控制器、氣壓高度計、轉速測量傳感器、PCM遙控接收機、無線通信單元;其中,衛星定位模塊、數字羅盤、三軸陀螺儀、三軸加速度計、氣壓高度計、轉速測量傳感器、PCM遙控接收機均將所采集的數據輸入飛行控制系統機載控制計算機進行分析,飛行控制系統機載控制計算機將無人機衛星定位模塊和無人機氣壓高度計采集到的多旋翼無人機在檢測時的GPS值和高度值與所檢測到的DSP處理單元輸入的電勢差值相匹配后,通過機載無線通信單元將數據傳輸給地面站無線通信單元,地面站信息處理裝置可以將檢測電勢差數據分析處理,并結合GPS值和高度值,可以判斷非正常工作的絕緣子片位置。
多旋翼無人機搭載高清攝像頭,與飛行控制系統機載控制計算機相連,不但能將所采集視頻通過機載無線通信單元傳送給地面站無線通信單元,由地面站人員實時監控多旋翼無人機的飛行狀態;同時,可在多旋翼無人機靠近絕緣子的過程中依靠高清攝像頭實時傳回的圖像,操控飛行控制系統機載控制計算機調節飛行高度以及探測上、下極之間的距離,使探測上極與探測下極能夠分別接觸絕緣子兩端,分別測得電勢值。飛行控制系統機載控制計算機通過機載無線通信單元接收到地面站信息處理系統調節探測上極與探測下極之間的距離的信號后,發出指令給升降單元,由升降單元調節升降結構從而改變探測上極與探測下極之間的距離。其中,升降單元為可編程單片機與升降結構中的電機驅動單元連接,主要將飛行控制系統機載控制計算機發出的距離信號轉化為電機驅動信號,以調節升降結構。
還有其他一些系統整體性的設計也是要在主要部分設計過程中要考慮的問題,尤其是環境適應性的設計,包括電磁環境抗干擾能力,重要部分的防水霧設計等。
3 硬件概述
本產品以多旋翼無人機為搭載平臺,集高壓霧化自動噴水和實時視頻傳輸于一體的搭載裝置,應用大數據分析和圖像識別技術,研發復合絕緣子憎水性能自動判定軟件,實現復合絕緣子憎水性能的智能檢測。
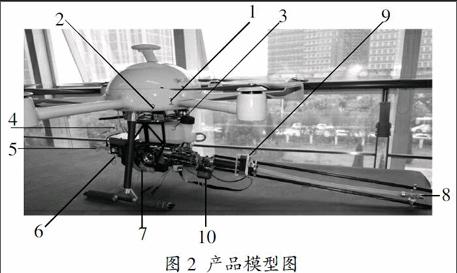
3.1 硬件模型
圖中,1是裝置固定爪鉤*4,2是900ml水箱,3是系統控制盒,4是電池倉,5是高清圖傳系統,6是高壓水泵,7是霧化噴頭&可轉向機構,8是運動相機,9是相機控制模塊,10是高清攝像頭。
3.2 硬件性能參數
復合絕緣子憎水性智能檢測裝置平臺的工作電壓為3S(11.1V~12.6V),工作電流為0.4A~2.5A,續航時間考慮工作的實際情況,大約在1h左右。給水箱注水方式采用灌注加裝,水箱容量共900ml,當無人機飛行到指定的位置時,在距離無人機不大于1.5km的區域內,可通過遠程遙控控制噴水,噴水時旋轉噴頭,調節水霧形狀,噴射距離隨之變化,一般為1m~6m遠,噴射角度采用安裝球接霧化噴頭,可輔助調整角度,一般范圍是水平:60°~+60°,垂直:-45°~+10°,霧化出水量大約0.8L/min。拍攝裝置中相機內存為最高支持64GB,且為MicroSD、MicroSDHC、MicroSDXC卡,必須使用Class 10速率的內存卡,運動相機圖像質量最高可達1200萬像素,視頻質量可達4K@15fps,圖像傳輸清晰度為480P,圖像傳輸距離在1km內。
4 憎水性分析軟件系統
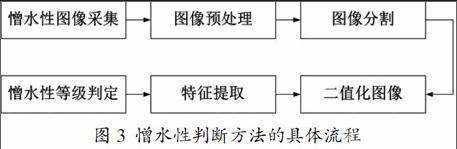
為了達到對相應復合絕緣子的憎水性進行檢測和等級判斷的目的,需要通過數字圖像處理技術對獲取到的復合絕緣子憎水性圖像進行計算,其具體流程如圖3所示。
獲得一張清晰的圖片對于分析復合絕緣子憎水性的后續工作而言至關重要。復合絕緣子圖像在線采集系統的結構總體框圖如圖4所示,系統分為塔上裝置和塔下裝置,塔下主要有無線收發器、電腦和路由器,塔下裝置主要有噴水裝置和圖像采集裝置,塔上裝置和塔下裝置之間通過無線通信,充分保障了工作人員的人身安全[2-3]。
無線收發器插在電腦上,與電腦通過USB通信,而無線收發器與噴水裝置通過nRF24L01無線模塊通信,這樣電腦控制噴水裝置的指令就通過無線收發器轉發給噴水裝置,從而可控制噴水裝置的噴水方向和噴水強度;電腦和攝像頭都連接到路由器創建的WIFI上,這樣它們就在一個局域網內,在電腦上安裝一個上位機即可獲得攝像頭拍攝的圖像,并控制攝像頭上下左右轉動以及變焦拍照,圖片也能自動保存在電腦中。
5 結束語
本文以多旋翼無人機為搭載平臺,研制集高壓霧化自動噴水和實時視頻傳輸于一體的搭載裝置,應用大數據分析和圖像識別技術,研發復合絕緣子憎水性能自動判定軟件,實現復合絕緣子憎水性能的智能檢測。首先介紹了整套搭載裝置硬件系統,包括圖像實時傳輸系統的硬件選擇,霧化噴水裝置的實現,噴水加壓裝置的型號選擇,機械連接方式的方案探討,以及實時控制平臺的軟硬件結構體系的細化等。噴水加壓裝置大致包括圖像實時傳輸系統,霧化噴水裝置系統,機械連接和實時控制系統。然后對實時憎水性軟件分析系統進行程序的編寫。接下來的研究中,會將本文與現有的檢測方法進行比對參考,現場測試該裝置檢測方法的有效性和優勢,并改進性能。
參考文獻:
[1]鄭武略,張富春,翁珠奮,等.基于旋翼無人機的絕緣子憎水性檢測[J].廣東電力,2016,29(08):116-119+124.
[2]尚俊霞.復合絕緣子憎水性檢測與等級判斷的研究[J].電瓷避雷器,2016(03):30-36.
[3]謝望君,羅勇,黃俊,等.復合絕緣子圖像在線采集前端控制系統設計[J].工程設計學報,2015,22(05):482-486.
[4]柯洪昌,付浩海,孔德剛.基于改進的Hough變換的絕緣子檢測方法[J].科技創新與應用,2017(31):6+9.
[5]陳泓達,余興祥,馬越,等.絕緣子在線檢測系統[J].科技創新與應用,2016(24):195-196.