軟著陸驗證試驗中月面特性模擬方法
2018-02-27 06:36:31任德鵬黨兆龍
航天器環境工程 2018年1期
任德鵬,黨兆龍
(北京空間飛行器總體設計部,北京 100094)
0 引言
高安全、高可靠地實現月面軟著陸是探測器開展科學探測的基礎。由于該過程不可逆、任務復雜、可靠性要求高,需要進行充分的地面試驗驗證。美國曾在“阿波羅”計劃中開展了旨在提高航天員對登月艙操控能力的著陸驗證試驗;我國月面探測器研制過程中也建設了綜合試驗場,對軟著陸技術和探測器的設計狀態開展了系列驗證試驗[1-2]。由于地面測控及探測器的制導導航與控制過程均存在誤差,導致探測器尚不具備月面定點著陸的能力,軟著陸過程經歷的月表環境存在一定的隨機性。為實現在月面的安全著陸,探測器上配置了多種導航敏感器[3],在著陸過程中需要測距和測速儀實時測量探測器相對月面的高度和飛行速度以對探測器自主導航進行修正,并須同時對一定范圍的月面進行光學圖像拍照和激光 DEM(數字高程圖像)掃描,識別出安全等級最高的月面區域將之作為目標點完成降落。探測器的測距、測速性能及其安全識別能力直接影響著陸結果,與之相關的月面特性模擬是試驗設計的一項重要內容。
地形分布是月面的一項重要特性。真實的月球表面分布著大小不同的撞擊坑和石塊,地勢崎嶇不平[4]。試驗場中月面地形的模擬首先要符合月面真實的分布特征;為充分驗證探測器安全區的識別能力,模擬月面還需要能夠快速更換并具備多種月面典型地形的模擬能力。月表的反射特性對探測器軟著陸而言是另一項重要特性,地面試驗中需要考慮月表對可見光、激光和微波反射特性的模擬,以滿足導航敏感器的工作條件。
針對月面地形的模擬已有不少學者開展了研究工作[5-7],其途徑均按照月面真實地形的平均統計分布規律和撞擊坑、石塊的形狀,在所需范圍內隨機生成模擬地形,具體的應用背景決定了對月面地形的模擬程度,文獻[5-6]主要進行了月球車移動過程的動力學仿真,文獻[7]主要進行了著陸過程的穩定性分析,其工作中側重模擬了與仿真對象有相同尺度的月面地形特征。但這些方法都無法進行多種典型地形的調整更換,更不涉及對月表反射特性的模擬,不能直接滿足軟著陸驗證的要求。
本文基于我國月面探測器的設計狀態和試驗需求,提出了月面特性模擬的要求和方法,先后支持了“嫦娥三號”“嫦娥五號”探測器的軟著陸驗證試驗,實際效果表明該模擬方法全面滿足試驗要求。
1 軟著陸驗證試驗簡述
我國月面探測器研制過程中,為完成軟著陸驗證試驗分別投產了真實探測器的驗證器和試驗塔架:塔架通過一根吊繩連接驗證器,為其提供豎直向上的恒拉力以實現月面低重力環境的模擬;塔架伺服機構能夠跟隨驗證器的運動,保證拉力的方向性;塔架可提供高度0~70 m、水平16 m×16 m的有效試驗空間,其正下方鋪設模擬月面;試驗中驗證器被起吊至試驗高度,在塔架拉力的輔助下依靠自身推進系統提供的動力控制飛行姿態和軌跡,期間微波測距測速敏感器、激光測速敏感器發射的電磁波照射至模擬月面上并測得驗證器的飛行參數,成像敏感器對驗證器正下方 35 m×35 m視場范圍的模擬地形進行拍圖、反演并識別出安全點,最終在GNC的控制下驗證器降落至模擬月面的安全區域內,從而實現對探測器月面軟著陸飛行及探測器工作過程的模擬。整個試驗系統如圖1所示。
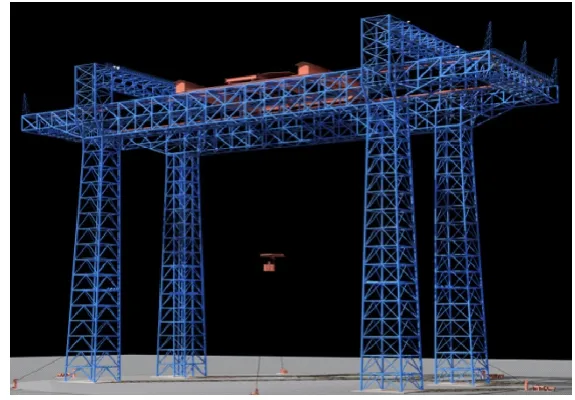
圖1 軟著陸驗證試驗系統示意Fig.1 Illustration of the soft landing verification test system
2 月面特性模擬要求
軟著陸試驗中的模擬月面需同時滿足以下指標和要求:
1)試驗塔架下方全部為模擬月面,模擬面積為60 m×60 m,以覆蓋導航敏感器的視場;
2)模擬真實月表撞擊坑、石塊和坡度分布,符合月面地形的分布統計規律,并能夠實現對不同典型地形的模擬,滿足多種試驗工況的模擬要求;
3)模擬地形表面顏色與真實月面相符,對1047~1064 nm的激光反射率范圍在 6%~30%之間,對34.25 GHz及34.55 GHz的電磁波的反射系數為-5~-30 dB;
4)模擬地形需有明顯的地形特征,設置相對的“危險區”和“安全區”,以滿足對安全區識別能力的考核,且為保證運動的匹配性,需將“安全區”中心設置在驗證器16 m×16 m的運動可達范圍內。
3 月面地形模擬
月球表面的探測數據表明,石塊和撞擊坑是月面地形的主要特征[8],也是月面地形模擬相似程度的主要影響因素。統計結果表明,月面石塊和撞擊坑的分布規律可以用單位面積內超過某一直徑D的石塊或撞擊坑數目N來表示,即N=aDb[9],其對數表達式為

式中,a、b為分布系數,該值與月面地形相關。“嫦娥”探測器月面著陸區為虹灣或風暴洋,兩處均為典型的平坦月海,分布系數取與之對應的數值。
3.1 石塊分布及形狀
1)石塊分布
平坦月海區域石塊分布的擬合數學模型[10]可描述為:

2)石塊形狀
月面上石塊的形狀多種多樣,通常采用其最小與最大尺度的比值(尺寸特征比)來描述,該比值覆蓋了一個較寬的范圍,一個標準月球巖石的形狀被認為是其尺寸特征比介于1和1/5之間。在地形模擬中,對于相同高度的石塊,尺寸特征比越小則石塊的占地面積越大、其俯視的地形特征更明顯。軟著陸驗證試驗中,地形的設置直接考核成像敏感器高程的識別能力,地形特征不宜太明顯,因此模擬石塊的尺寸特征比按文獻[10]的推薦值即1/2設定,既滿足考核的目的也便于工程的實施。
3.2 撞擊坑分布及形狀
平坦月海區域,撞擊坑分布規律可以描述為[10]

表1給出了月面撞擊坑的類型及其形狀。其中新鮮撞擊坑具有更清晰的輪廓,在確定坑深模擬要求后,新鮮坑的直徑尺寸最小且附帶更明顯的坑唇,其高程變化更復雜。因此模擬地形中將所有撞擊坑均設置為新鮮坑,更符合驗證試驗的目的。
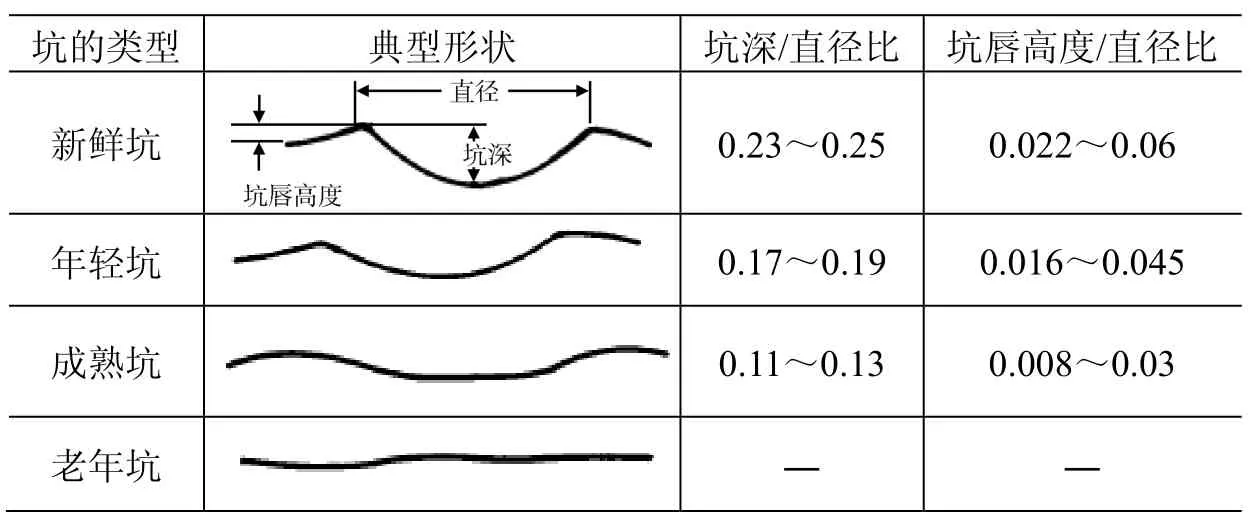
表1 月面撞擊坑類型及形狀Table 1 Types and shapes of the lunar craters
對于新鮮的撞擊坑,假設其外形對稱分布,則可采用二次函數來描述其具體的形狀。建立撞擊坑橫截面的坐標系,定義撞擊坑深度為Zd、坑唇高度為Zr,如圖2所示。
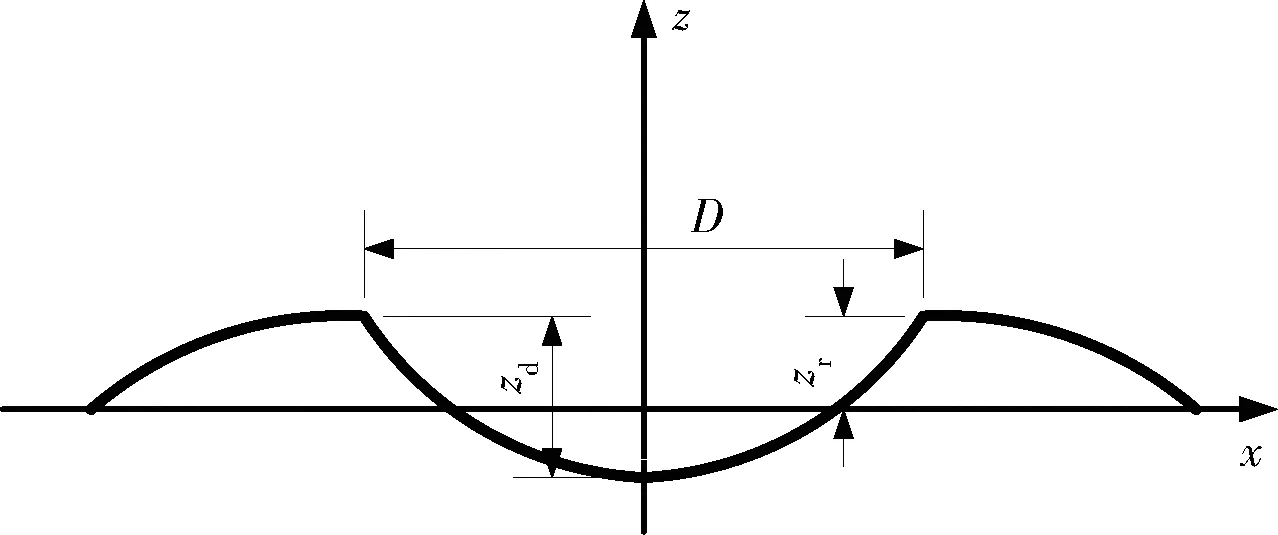
圖2 典型撞擊坑形狀Fig.2 Typical shape of a crater
采用統一的分段函數描述典型撞擊坑的具體形狀,假設該分段函數為

主坑區的截面曲線可描述為

坑唇區的形狀可描述為

采用式(2)、式(3)可確定模擬區內石塊和撞擊坑的數量分布,式(4)~式(6)可確定撞擊坑的形狀。在模擬范圍內隨機確定撞擊坑和石塊的位置,即可得到符合月面統計規律的模擬地形,采用MATLAB仿真軟件獲得月面地形的 DEM 圖,如圖3所示。該區域內存在1440個撞擊坑和562個石塊,其中撞擊坑直徑模擬涵蓋了0.2~10 m的范圍、石塊直徑涵蓋了0.1~2 m的范圍。該地形雖然與月面真實情況相似,但撞擊坑和石塊的數量過多難以實施、且其分布沒有規律,無法實現精確考核的目的,因此該地形無法直接用于驗證試驗。
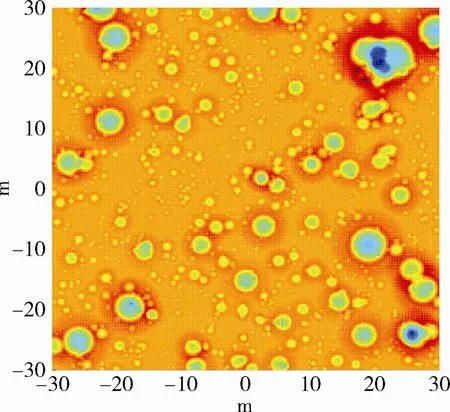
圖3 月面地形模擬結果示意圖Fig.3 Illustration of lunar terrain simulation results
3.3 模擬地形調整設計
3.3.1 模擬高程剔除設計
軟著陸驗證試驗中月面地形模擬主要用于對成像敏感器安全區識別能力的考核。受測量精度的限制,成像敏感器無法識別高程差小于0.2 m的撞擊坑或石塊,且該尺度的地形不影響著陸的安全性,因此試驗中對于高程差過小的地形不再進行模擬;對于高程差大于一定尺度的撞擊坑或石塊,識別軟件均將其所在的區域處理為“危險區”進行剔除,以保證探測器的著陸安全,因此高程差過大的地形在試驗中也不予模擬。地形模擬中將石塊的高徑比設定為0.5,撞擊坑的深徑比確定為0.23~0.25,因此地形的高程與石塊及撞擊坑的直徑有確定的對應關系。模擬地形設計中考慮了高程的剔除,將石塊直徑模擬范圍設定為0.2~1.2 m,撞擊坑直徑模擬范圍選為 0.5~3 m,重新按照式(2)、式(3)確定分布數量,模擬結果如表2、表3所示。可見,設定高程差限制后模擬區內石塊的數量減少為36個,撞擊坑數量減少為135個,但在設定的模擬范圍內,石塊和撞擊坑的數量仍符合月面分布規律。
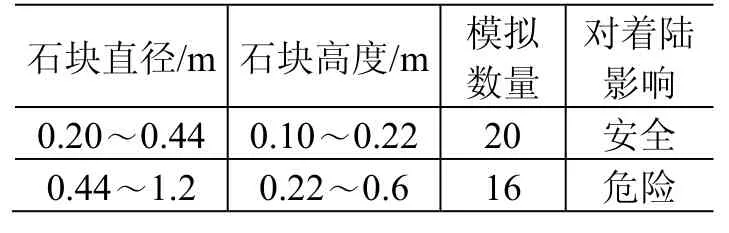
表2 高程差限定后石塊的模擬結果Table 2 Simulation results of the bulges under restricted of elevation is restricted
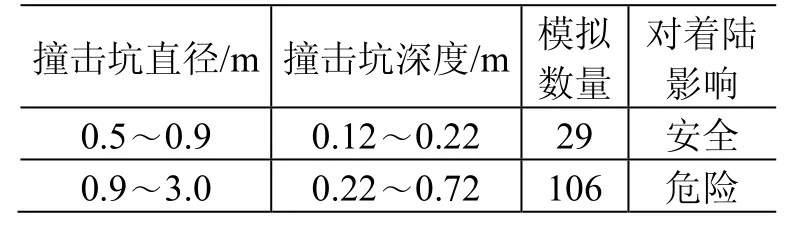
表3 高程差限定后撞擊坑的模擬結果Table 3 Simulation results of the craters under restricted of elevation is restricted
3.3.2 安全區分布設計
通過高程剔除后確定了與試驗驗證相關的石塊和撞擊坑的數量,按常規的模擬法將在整個模擬范圍內隨機確定坑和石塊的位置,但由于試驗中驗證器水平運動范圍為中心16 m×16 m的區域,隨機分布可能導致“安全區”位于驗證器可達范圍外,勢必影響對試驗結果的評判。設計中采用分區法解決該問題:在驗證器運動可達的16 m×16 m模擬月面,按表2、表3中的安全尺寸設定參數,即石塊和撞擊坑直徑取值范圍分別為 0.20~0.44 m和0.5~0.9 m,重新按式(2)、式(3)的分布規律確定數量并隨機確定位置,處理后該區域對探測器軟著陸而言全部為“安全區”;對于中心區以外的其他區域,在保持表2、表3中模擬總數不變的條件下,將剩余數量的石塊和撞擊坑隨機分布,處理后該區域內包含高程差大于0.2 m的坑或石塊,因此對軟著陸而言為“危險區”。該方法未改變整個模擬區內撞擊坑和石塊分布的數量,僅結合試驗需求對其位置進行了調整,使模擬地形滿足試驗需求。經調整后模擬月面的DEM如圖4所示,其中方框區域表示驗證器運動可達范圍。
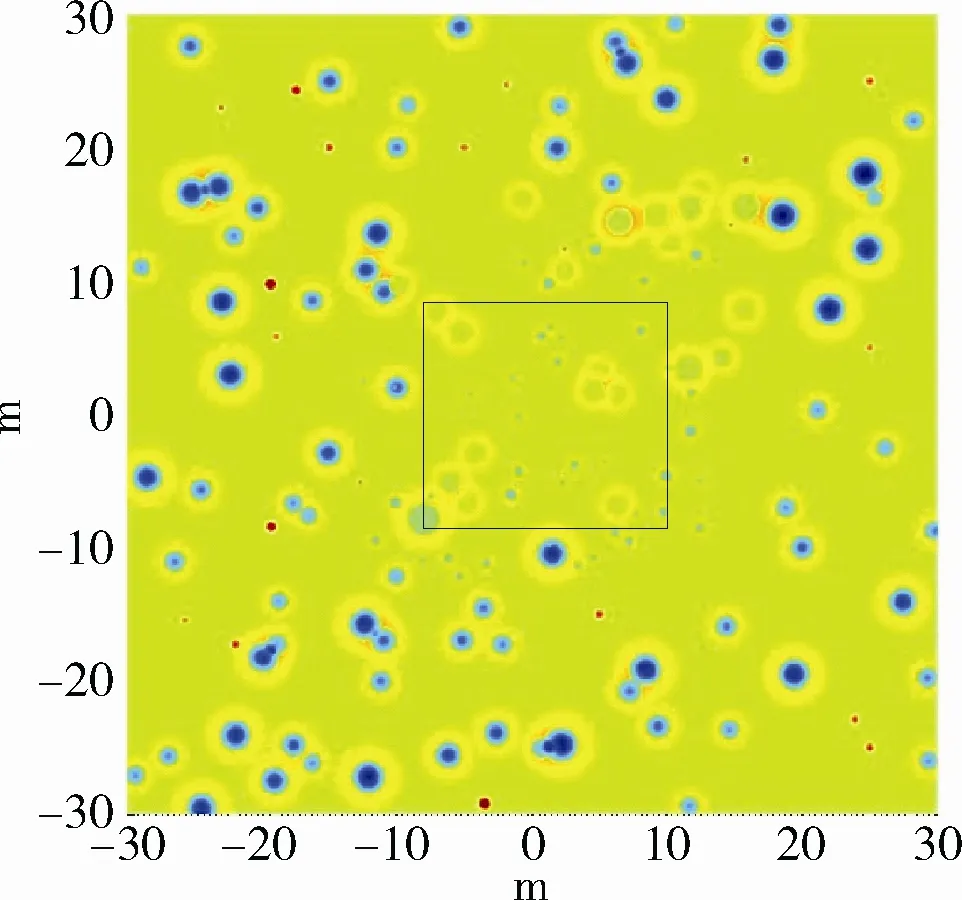
圖4 試驗場模擬地形高程模擬Fig.4 The elevation model of the testing ground for lunar terrain simulation
3.4 快速調整設計
軟著陸試驗需要設置多種典型的地形以充分驗證探測器的地形識別能力,對于總面積達 3600 m2的室外模擬月面,不具備隨時新建和調整模擬撞擊坑的條件。為滿足試驗要求,模擬月面采用了模塊化設計,即按圖4的地形要求一次性完成所有撞擊坑的建設,并要求所有撞擊坑均配有可移動的“坑唇”與“坑蓋”,通過改變模擬月面的高程差實現不同地形的模擬。圖 5為“安全區”中心坐標為(7.5 m,7.5 m)的模擬地形,該地形設置需要將預設“安全區”內的撞擊坑全部蓋上對應的“坑蓋”,使該區域內高程差小于0.2 m;而“安全區”以外的撞擊坑均恢復原模擬狀態,局部區域按模擬要求添加少量石塊,使其平均高程差大于0.2 m,只有探測器降落至設定的“安全區”范圍內才能通過試驗考核。采用該方法,模擬月面共組合出10種典型的月面地形,實現了快速調整的設計目標。
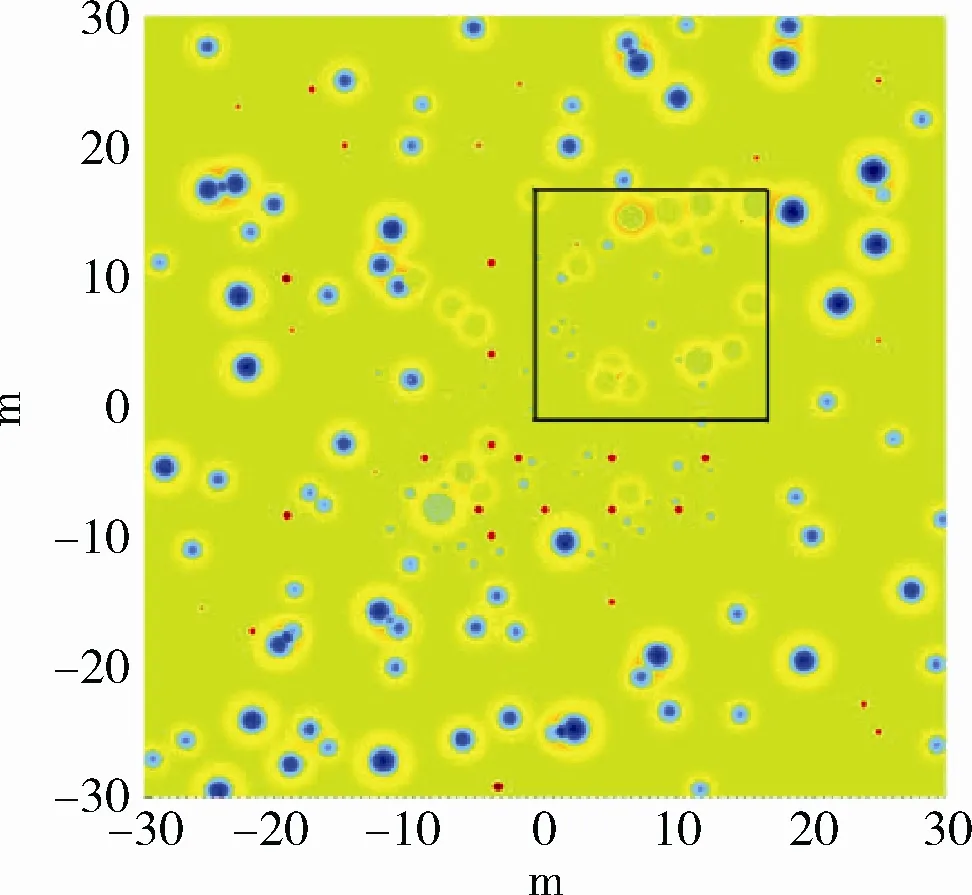
圖5 “安全區”位于右上的模擬地形Fig.5 Simulative terrain with the “safe area” at the upper right
4 月表反射特性模擬
為實現對導航敏感器工作性能的驗證,軟著陸驗證試驗需要模擬月表對不同頻段電磁波的反射特性,為便于試驗場室外環境的大面積施工,在大量測試的基礎上研制了一種反射涂層,模擬月面外表噴涂該涂層后可滿足模擬要求。
4.1 可見光/激光反射特性模擬
反射涂層的本體選用SZ型涂料,其特點是耐腐蝕、附著力強、壽命長,其標準樣品為白色,對可見光的反射率為80%左右。為模擬月表對可見光的反射特性,對SZ涂料按反射率25%左右的色板調色后,涂料呈灰色,如圖6所示。采用VARIAN Cary 5000型分光光度計對涂料反射率進行了測量,結果如圖7所示。可見,調色后涂料對400~800 nm可見光的平均漫反射率約為 0.22,與設計值相符;對 1047~1064 nm 激光的漫反射率約為0.18,符合試驗要求。

圖6 調色后涂料表面狀態Fig.6 Surface states of the coating after palette
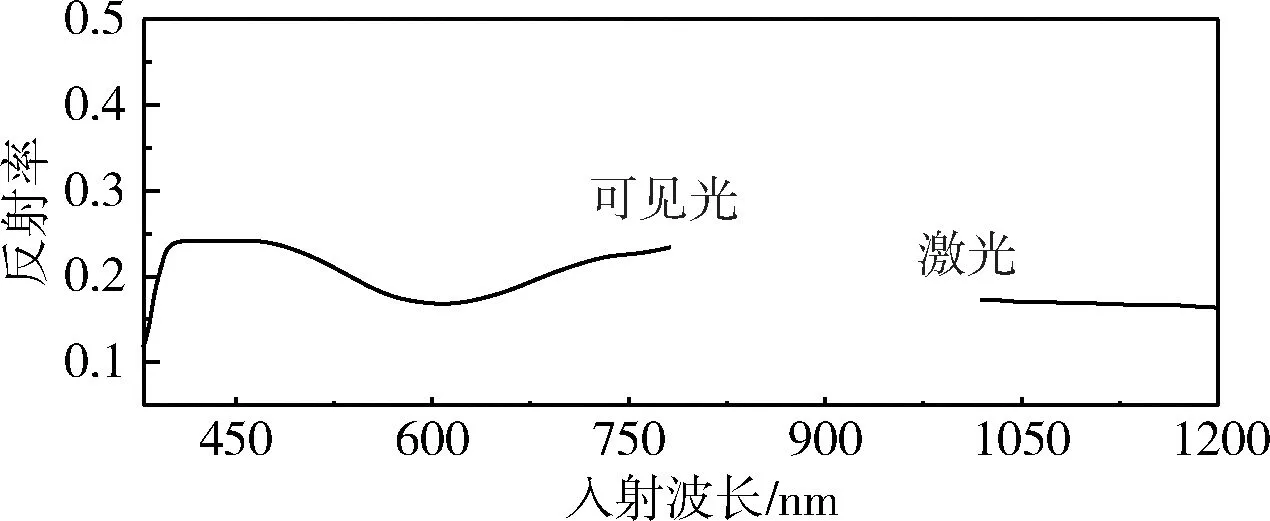
圖7 涂料對可見光及激光反射率測試結果Fig.7 Test results of reflectivity for the coating for visible light and laser,respectively
4.2 微波反射特性模擬
研究表明,月表對微波的反射是電磁波在月壤中傳輸特性的表觀體現[11],反射系數與月壤的物質成分相關。為模擬月表對34 GHz電磁波的反射系數,在SZ涂料中添加了金剛砂,其主要化學成分為氧化硅、氧化鋁和氧化鐵,樣品如圖8所示。添加金剛砂顆粒后重新測試了涂料的表面反射率,與未添加的測試數據最大相對偏差小于2%,即添加物未影響涂料對可見光和激光的反射率。為測試涂料對電磁波的反射特性,制作了一個長寬各為260 mm、厚度為150 mm的混凝土樣件,其表面噴涂0.5~1 mm厚的含金剛砂且經調色的SZ涂料,如圖9所示。按 GJB 5239—2004的測試方法對樣品對34 GHz電磁波的反射率進行了測量,結果如表 4所示。可見,樣品對不同極化入射天線發射電磁波的反射率介于-7.0~-18.3 dB范圍,符合指標要求。

圖8 金剛砂添加物樣品Fig.8 Additive sample of silicon carbide

圖9 電磁波反射率測試樣品Fig.9 Sample for the reflectivity test of electromagnetic wave

表4 測試樣品對34 GHz電磁波反射率測試結果Table 4 Test results of the reflectivity of the sample for 34 GHz electromagnetic wave
4.3 模擬月面施工設計
整個60 m×60 m的模擬月面采用整體施工的方案,使用4層不同材料鋪設而成,最下面為試驗場原位土的夯實層,厚度約為30 cm;其上鋪設2 cm左右的灰土,灰土層上方整體澆筑15~20 cm的混凝土,最上面噴涂0.5~1.5 mm的涂層。模擬月面縱向截面結構如圖10所示。完成施工后,對模擬月面的表面反射特性進行了復測,各項指標滿足要求。
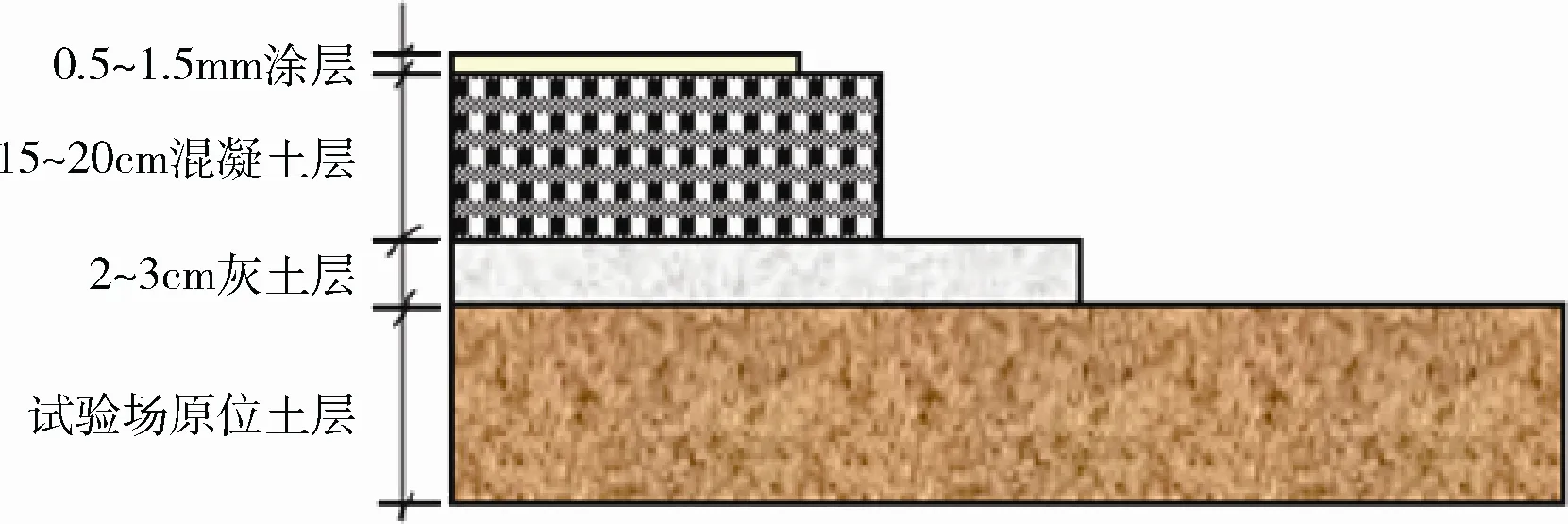
圖10 模擬月面區縱向截面示意Fig.10 Illustration of the longitudinal section of simulative lunar terrain
5 試驗效果
按本文的方法完成了試驗場模擬月面的建設,并先后支持了100余次的軟著陸驗證試驗,各工況試驗中月面模擬地形設置正確,驗證器微波測距測速敏感器、激光測距敏感器均工作正常,成像敏感器順利完成了模擬月面成像,并正確完成了安全區識別任務。圖11為某試驗工況中完成模擬地形設置后,采用地面設備測量的試驗場DEM圖(局部);圖12為驗證器成像敏感器對該區域模擬地形的掃描結果。可見兩者完全對應,成像敏感器對模擬地形中特征點提取清晰,DEM反演正確。圖13是安全區識別軟件根據成像敏感器圖像完成運算的結果,可見最終選定的安全點位于圖像的中心,與試驗前設定的結果一致。
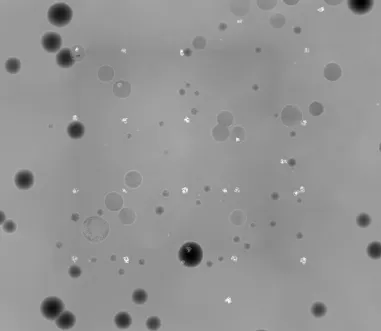
圖11 試驗場模擬地形DEM測量結果(局部)Fig.11 DEM measured results of the testing ground
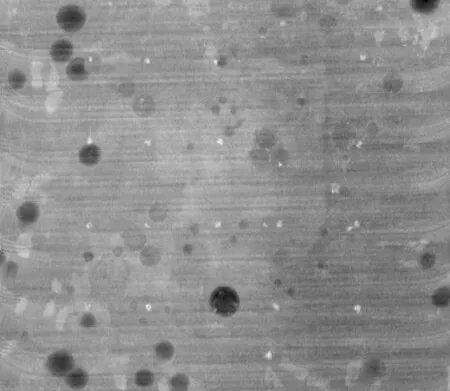
圖12 驗證器成像敏感器反演結果Fig.12 Image results of the probe’s imaging sensor
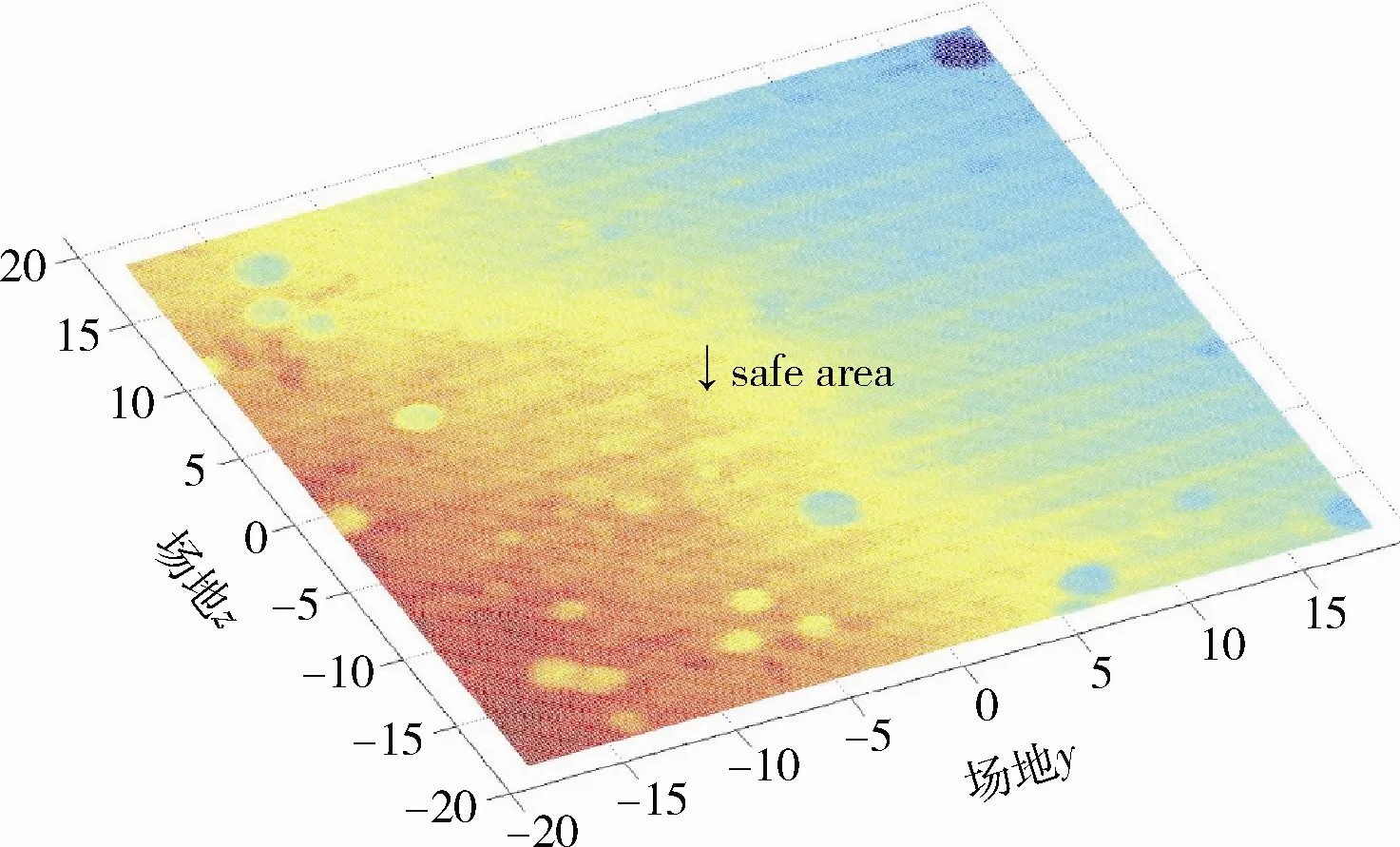
圖13 驗證器安全區識別結果Fig.13 Identification results of the safe area for the validator
6 結束語
探測器軟著陸驗證試驗中對月面特性的模擬有特殊要求。本文提出的模擬方法符合月面地形分布的規律,在不影響試驗目的的基礎上對模擬地形進行了簡化處理,降低了試驗場的實施難度;采用模塊化設計思路便于多種地形的快速調整,提高了模擬的靈活性;采用特殊涂料噴涂模擬地形表面,實現了對月表反射特性的模擬。經測試,模擬月面指標滿足要求,多次軟著陸驗證試驗中導航敏感器均工作正常,并完成了在預定區域內的安全著陸,實現了對探測器安全區識別及導航控制性能的驗證,證明了月面特性模擬方法的正確性和可行性,可為未來我國行星表面探測器及著陸技術的驗證提供借鑒。
(References)
[1]葉培建,于登云,孫澤洲,等.中國月球探測器的成就與展望[J].深空探測學報,2016,3(4): 323-333 YE P J,YU D Y,SUN Z Z,et al.Achievements and prospect of Chinese lunar probes[J].Journal of Deep Space Exploration,2016,3(4): 323-333
[2]孫澤洲,張熇,賈陽,等.嫦娥三號探測器地面驗證技術[J].中國科學: 技術科學,2014,44(4): 369-376 SUN Z Z,ZHANG H,JIA Y,et al.Ground validation technologies of the Chang’e-3 lunar spacecraft[J].Scientia Sinica Technologica,2014,44(4): 369-376
[3]張洪華,李驥,關軼峰,等.嫦娥三號著陸器動力下降的自主導航[J].控制理論與應用,2014,31(12):1686-1694 ZHANG H H,LI J,GUAN Y F,et al.Autonomous navigation for powered descent phase of Chang’e-3 lunar lander[J].Control Theory & Applications,2014,31(12): 1686-1694
[4]HEWES D E,OBRYAN T C.Operational features of the Langley lunar landing research facility: NASA TN D-3828[R],1967
[5]趙一兵,李琳輝,張明恒,等.用于月球車性能仿真的著陸區三維地形構造方法研究[J].系統仿真學報,2011,23(11): 2429-2433 ZHAO Y B,LI L H,ZHANG M H,et al.Research on landing area of lunar terrain simulation method[J].Journal of System Simulation,2011,23(11): 2429-2433
[6]張伍,黨兆龍,賈陽.月面數字地形構造方法研究[J].航天器環境工程,2008,25(4): 301-305 ZHANG W,DANG Z L,JIA Y.Constructing methods for lunar digital terrain[J].Spacecraft Environment Engineering,2008,25(4): 301-305
[7]黃俊,李飛,張熇.一種虛擬月表地形建立方法的研究[J].航天器工程,2013,22(3): 35-40 HUANG J,LI F,ZHANG H.Research of a way of constituting lunar virtual terrain[J]. Spacecraft Engineering,2013,22(3): 35-40
[8]歐陽自遠.月球科學概論[M].北京: 中國科學技術出版社,2005: 56-68
[9]CONNOR H F.Development of a lunar surface model for the Apollo 15 landing site-case 310: NASA CR-121359[R].Washington D C: NASA,1971
[10]BATTERSON B,BENSON H,GAULT D,et a1.NASA space vehicle design criteria (Environment): lunar surface models: NASA SP-8023[R].Washington D.C.:NASA,1969
[11]李良格.月壤厚度及介電常數反演研究[D].武漢: 華中科技大學,2012: 9-10