同步磁阻電動機無位置傳感器控制的自起動方法
2018-03-01 06:31:26林衛鵬湯寧平章金晶
電氣技術 2018年2期
林衛鵬 湯寧平 章金晶
(福州大學電氣工程與自動化學院,福州 350108)
同步磁阻電動機相比于其他電動機具有成本低、無銅耗、效率高、轉矩脈動小且不存在高溫失磁及弱磁擴速難等一系列優點,是一種十分高效的電動機。
對于高性能的電動機調速系統而言,通常需要在轉子同軸上安裝機械式傳感器以用于檢測轉子位置角及轉速信息,從而實現轉速、電流雙閉環控制,但是這也給控制系統帶來了一系列的弊端[1]。諸如其增加了硬件系統的成本和復雜性;檢測信號也易受外界環境干擾從而降低了系統的可靠性;同時在惡劣環境下,硬件容易受損,進一步增加了系統的維護成本和不穩定性。
為此,近年來,無位置傳感器控制的研究成為了一個熱點。許多學者提出了諸如基于電動機凸極效應、反電動勢、狀態觀測器、滑模觀測器以及卡爾曼濾波器等一些估算方法[2]。但是由于電動機在起動及低速運行下,信噪比較低,從而使得上述方法并不能很好地適用于電動機自起動及低速運行中。因此,文獻[3-5]提出了升壓升頻起動方法,但該方法使電動機運行于速度、電流均開環的狀態下,故電流是不可控的,容易產生過流問題。文獻[6-7]提出了高頻信號注入法,這種方法需要向系統中持續注入一個高頻電流,從而容易引起諧波和轉矩脈動,同時實現過程較為復雜困難,故動態性能并不理想。
針對上述問題,本文采用了I-f流頻法自起動控制策略,該方法在電動機起動及低速運行階段采用單電流環的閉環控制,而在中高速時平穩地切換到基于滑模觀測器的無位置傳感器控制,從而實現同步磁阻電動機在全速范圍內的無位置傳感器控制。
1 同步磁阻電動機的數學模型
圖1所示為同步磁阻電動機在αβ 靜止坐標系及dq同步旋轉坐標系中的向量圖。其中us、is分別為定子電壓矢量及定子電流矢量;ψs為定子磁鏈矢量;θr、θi分別為轉子位置角、電流角;ωr為同步旋轉電角速度;下標d、q表示dq軸分量。
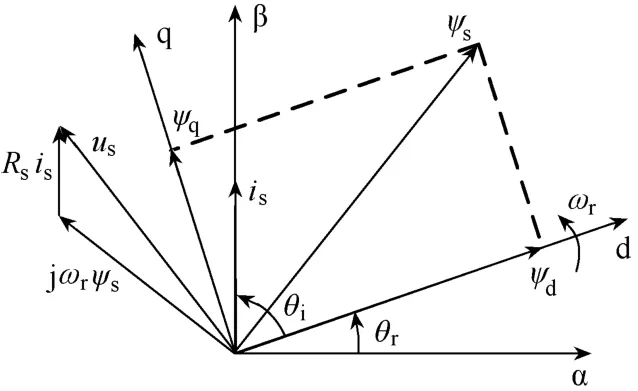
圖1 同步磁阻電動機向量圖
由圖1可得dq同步旋轉坐標下,同步磁阻電動機電壓方程為

式中,Rs為電動機定子電阻參數;p表求導。磁鏈方程為

式中,Ld、Lq分別為電動機dq軸電感參數。電磁轉矩方程為

式中,Te為電磁轉矩,np為轉子極對數。
同時又有

電動機的機械運動方程為

式中,TL為負載轉矩,J為轉動慣量,αω為給定加速度。
2 I-f流頻法起動控制
由式(6)可知,電動機調速過程中需要對電磁轉矩進行控制。當在一定負載下、對同步磁阻電動機進行加減速控制、以使其運行在不同的轉速下時,需要有相應的電磁轉矩。從式(5)可以看出,電磁轉矩與定子電流幅值和電流角有關。因此,只需通過控制定子電流矢量,便可進行電動機的調速控制,從而實現單電流環的閉環控制。其控制系統框圖如圖2所示。
圖 3中假定坐標系 dq*模塊為與定子電流矢量旋轉速度相同且滯后一定角度的dq*旋轉坐標系,通過該給定坐標系可將給定定子電流矢量分解成dq*分量,從而實現電動機的解耦控制。角度生成器主要是對給定頻率進行積分以獲得坐標變換所需的角度θ*,而給定頻率又是通過給定加速度積分得到。根據圖3所示的給定定子電流矢量與各坐標系間的角度關系,可得坐標變換角為

式中,θf、分別為給定定子電流矢量與α 軸及 d*軸的夾角。

圖3 流頻法控制電動機向量圖
3 起動過程分析
同步磁阻電動機I-f流頻法起動主要包含有3個階段:①轉子d軸初始定位階段;②恒流加速起動階段;③恒速降流切換階段[8]。
3.1 轉子d軸初始定位
由于電動機在起動運行之前,轉子d軸位置是任意的,從而可能造成電動機無法正常起動,為此需要在電動機運行前進行轉子d軸初始定位。如圖4(a)所示,當向電動機A相繞組中施加一靜止的電壓矢量時,由于電壓矢量與轉子d軸間存在一電流角,從而產生一迫使d軸與A相繞組相重合的力矩。如圖4(b)所示,當電流角逐漸減小至0時,電磁轉矩隨之降為0,轉子d軸被定位在A相繞組上。

圖4 轉子初始定位過程

圖5 恒流加速起動過程
3.2 恒流加速起動
當轉子初始定位完成后,電動機將進入恒流加速階段。如圖5所示,在此階段,需向電動機中通入一幅值恒定的定子電流矢量,并且使該電流矢量以適當的旋轉加速度開始加速旋轉至給定速度。由式(5)、式(6)可知,當電流矢量開始由d軸旋轉起來后,其與轉子d軸間的電流角將逐漸增大,從而產生一隨之增大的電磁轉矩,直至電磁轉矩大于負載轉矩時,電動機開始起動加速旋轉。在電動機加速至電流矢量頻率時,由于加速度的存在,電動機將繼續加速運行,從而使得電流角和電磁轉矩逐漸減小,直至電磁轉矩小于負載轉矩,電動機開始減速運行。當電動機電角速度再次與電流矢量頻率相等時,電流角和電磁轉矩再次逐漸增大。這種反復調整過程,體現了電動機具有“轉矩—功角自平衡”的特性。
根據以上分析可得,在定子電流幅值保持恒定下,當負載轉矩發生變化時,電動機將通過改變電流角產生與其相匹配的電磁轉矩。由式(5)可知,在電流角θi=45°時,電磁轉矩達到最大,若此時再加大負載轉矩,則會使得電流角大于45°,從而導致電磁轉矩下降。在這種情況下,電動機將會發生失步。因此,為了使電動機能夠在一定的負載下平穩起動,電磁轉矩需要滿足以下條件:

式中,Temax、TLmax分別為起動時刻最大的電磁轉矩和負載轉矩。
結合式(5)、式(8)可知,當負載一定時,給定加速度αω越大,所需的定子電流is越大。
3.3 恒速降流切換
如圖6所示,當電動機達到給定速度時,由于滑模觀測器估算的轉子位置 dest及轉速與實際值間的誤差較小,因此可忽略 d軸與 dest軸間的角度誤差。與此同時,電動機需由流頻法控制切換到基于滑模觀測器的無位置傳感器控制。
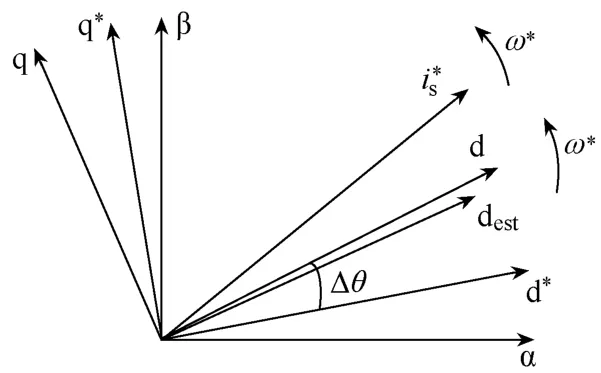
圖6 流頻法控制的電動機穩態運行矢量圖
但是,由于流頻法控制是基于dq*假定坐標系下的單電流環閉環控制,而基于滑模觀測器的無位置傳感器控制則是基于dq轉子坐標系下的轉速、電流雙閉環控制,因此兩者間存在一個較大的角度差Δθ,如果直接進行切換,就會引起轉矩和轉速的震蕩。為此,需要先使兩個坐標系相互重合,然后再進行兩種控制算法間的切換。這樣才能保證在切換過程中,電動機能夠平穩地運行。
采用SPSS 23.0對數據進行統計學分析。計量資料以表示,Shapiro-Wilk法檢驗正態分布,Levene法檢驗方差齊性。當數據符合正態分布,且方差齊性時,多組間比較采用單因素方差分析,兩兩組間比較采用LSD-t法檢驗。如數據非正態分布或方差不齊,采用非參數分析Kruskal-Wallis檢驗方法。對于包含兩種處理方式的實驗結果,采用析因設計方法進行檢驗。α=0.05為檢驗水準(雙側)。
從圖6中可知,兩算法間能否進行切換的判斷依據為兩坐標系間的角度差。為了實現電動機的解耦控制且獲得在電動機穩態運行下,兩個坐標系間的角度差,需要對假定的dq*坐標系進行初始定位。由于同步磁阻電動機的轉矩—功角自平衡穩定限制區域為[9]

因此,在轉子初始定位時,可假定與定子電流矢量旋轉頻率相同且滯后轉子 d軸 45°的 dq*旋轉坐標系,如圖7所示。則兩坐標系間的角度差為


圖7 假定坐標系dq*的初始定位
根據以上對“轉矩—功角自平衡”原理的分析可知,當定子電流減小時,電磁轉矩隨之減小,在達到新的轉矩平衡前,功角θi隨著轉速的減小逐漸增大,從而使得兩坐標系間的角度差Δθ 不斷減小。當Δθ 減小至某一較小閥值ε 時,、,此時便可進行平順地切換。其切換過程如圖8所示。

圖8 恒速降流切換過程
假設定子電流線性減小,則有

式中,t0為降流初始時刻,Ci為降流初始時刻的定子電流平方值,ki為定子電流下降斜率。
且有
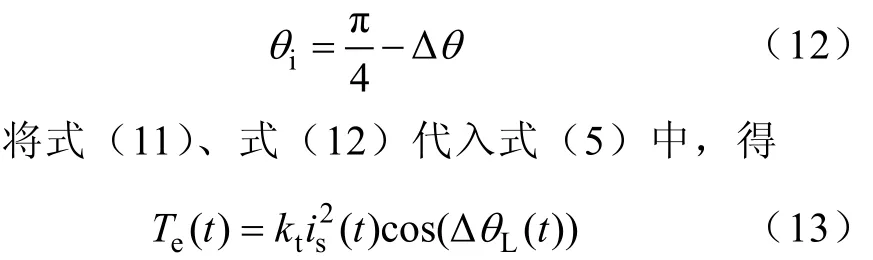
式中,ΔθL(t)=2Δθ(t),kt=3np(Ld?Lq)/4 為常量。
同時,為了簡化運算,可假設角度差ΔθL以斜率kθ線性減小,即

從式(17)中,可以看出角度差ΔθL的下降速率kθ正比于定子電流幅值is的下降速率ki,因此通過改變ki值,即可控制切換過程的速度。兩算法間能否進行平滑切換的另一個關鍵條件,就是在角度差Δθ=ε 的同時,電流剛好降到期望值。但是由于機械系統相比于電氣系統存在一定的響應滯后,因此過大的ki會導致在角度差Δθ 下降為ε 時,實際電流值已經遠小于所需的期望值,甚至出現負值,這將引起切換過程中轉矩和速度的脈動。
為了實現切換過程的快速性及平穩性,本文采用了變ki斜率的方法[10],即在角度差下降到不同階段時,取不同的電流下降斜率。隨著角度差越接近0,ki取值越小,即
式中,k1、k2、k3為定子電流在不同階段的下降斜率且k3<k2<k1;c1、c2分別為角度差下降過程的不同階段。
4 仿真結果與分析
根據以上分析,可在Matlab/Simulink仿真平臺上,搭建如圖9所示的同步磁阻電動機全速范圍內的無位置傳感器控制系統仿真模型。該控制系統采用最大轉矩電流比控制,當電動機處于起動及低速運行狀態時,3個控制開關被切換到 2位置,即為I-f流頻法起動,此時系統為電流單閉環矢量控制;而當電動機處于中高速運行狀態時,3個控制開關被切換到1位置,即為基于滑模觀測器的無位置傳感器控制,此時系統為轉速、電流雙閉環矢量控制。本文采用的基于滑模觀測器的無位置傳感器控制主要是先通過滑模觀測器觀測得到有效磁鏈,再通過鎖相環從有效磁鏈中提取出轉子位置角及轉速信息,從而實現無位置傳感器控制。

圖9 全速范圍內無位置傳感器控制系統框圖

表1 同步磁阻電動機參數
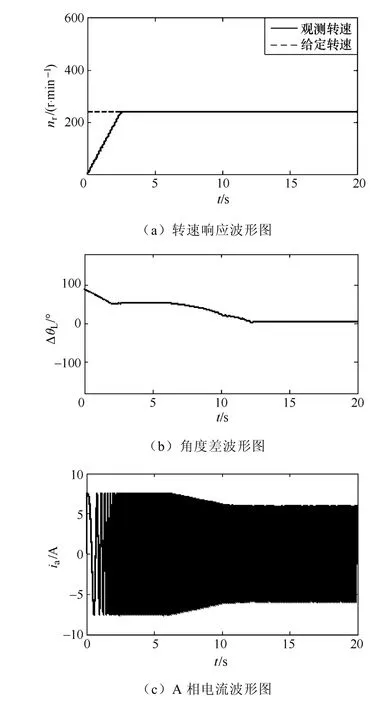
圖10 給定轉速50rad/s下,由I-f切換至基于滑模觀測器的無位置傳感器控制的響應波形圖
所用同步磁阻電動機參數見表1,仿真中I-f恒流起動階段給定的定子電流is為7.6A;負載轉矩TL為 5N·m;起動加速度αω為 20rad/s2;角度差閥值ε 為 0.5°;k1、k2、k3、c1、c2分別為 5A/s、1.25A/s、0.5A/s、0.4、0.1。仿真結果分別給出了在給定轉速50rad/s下,由 I-f起動切換至基于滑模觀測器的無位置傳感器控制及在給定轉速1000r/min下,由I-f起動至 50rad/s后切換至基于滑模觀測器的無位置傳感器控制的響應波形圖。由于在仿真環境下,轉子d軸與A相繞組一開始就是相互重合的,即電動機是由 0°初始位置開始旋轉的,因此仿真結果未給出轉子d軸初始定位階段的波形圖。
由圖10可以看出,在恒流加速起動階段,由于定子電流的閉環控制,使得其幅值始終維持在給定值7.6A。在電動機進入穩態運行后,在6s時開始進行恒速降流切換,在此階段隨著相電流的平滑下降,角度差也逐漸減小,而轉速一直維持在50rad/s,并未有較大的波動。在大約 12.5s時,角度差減小至給定閥值,控制系統由I-f流頻法控制平緩地切換至基于滑模觀測器的無位置傳感器控制,切換過程中,轉速、角度差以及相電流的脈動都較小。
圖11為同步磁阻電動機在I-f流頻法控制下,平穩起動并加速至50rad/s及在I-f切換至基于滑模觀測器的無位置傳感器控制后,電動機迅速加速至給定轉速 1000r/min的響應波形圖。由仿真結果圖可以看出,電動機起動過程較為平緩并且穩態運行時轉速較為平穩,脈動較小;同時在算法切換后,電動機對轉速突變具有較快的響應速度。這表明了在全速范圍內,同步磁阻電動機無位置傳感器控制具有較好的穩態及動態性能。
以上仿真結果與理論分析相符合,表明了將I-f流頻法控制運用于同步磁阻電動機無位置傳感器控制的自起動中是有效可行的,其不僅能夠實現電動機較為平緩地自起動,同時還能夠較為平穩地切換至基于滑模觀測器的無位置傳感器控制。

圖11 給定轉速1000r/min下,由I-f起動至50rad/s后切換至基于滑模觀測器的無位置傳感器控制的響應波形圖
5 結論
本文利用電動機的“轉矩-功角自平衡”特性,通過采用I-f流頻法,實現同步磁阻電動機無位置傳感器控制的自起動。同時在定子電流下降的過程中采取了變斜率的方法,使得流頻法控制能夠平穩地過渡到基于滑模觀測器的無位置傳感器控制,從而實現同步磁阻電動機在全速范圍內的無位置傳感器控制。仿真結果可以得到以下結論:
1)采用I-f流頻法控制,不僅可以實現同步磁阻電動機無位置傳感器控制的自起動,同時由于對定子電流進行了閉環控制,因此還可有效地防止在起動及切換過程中電流發生過流。
2)在不同的負載下,只需調整適當的給定加速度及定子電流大小,便可實現電動機平穩地起動,同時可有效地防止在起動過程中電動機發生失步。
3)在恒速降流階段,使定子電流采取變斜率的下降方式,可有效地保證切換過程的快速性與平穩性。
[1] 吳軒欽, 譚國俊, 何鳳有, 等. 基于有效磁鏈的電勵磁同步電機無速度傳感器控制[J]. 電工技術學報,2016, 31(6): 81-90.
[2] 胡慶波, 孫春媛. 永磁同步電機全速范圍無速度傳感器控制[J]. 電機與控制學報, 2016, 20(9): 73-79.
[3] 羅隆福, 楊晨, 許加柱, 等. 基于DSP的無位置傳感器無刷直流電機控制[J]. 微電機, 2005, 38(6): 92-93,81, 91.
[4] 湯長波, 顧敏明, 潘海鵬. 無位置傳感器無刷直流電機啟動方法研究[J]. 浙江理工大學學報, 2011,28(6): 886-889.
[5] 萬曉鳳, 康利平, 鄭博嘉. 無位置傳感器BLDCM的軟件升頻啟動策略[J]. 工程設計學報, 2014, 21(6):596-602.
[6] 劉穎, 周波, 馮瑛, 等. 基于脈振高頻電流注入SPMSM 低速無位置傳感器控制[J]. 電工技術學報,2012, 27(7): 139-145.
[7] 李翠萍, 王新生, 高陽. 無位置傳感器永磁同步電動機控制系統[J]. 微特電機, 2007, 35(12): 39-41, 45.
[8] 劉杰. 表貼式永磁同步電機無位置傳感器驅動技術研究[D]. 哈爾濱: 哈爾濱工業大學, 2014.
[9] 王子輝. 永磁同步電機全速度范圍無位置傳感器控制策略研究[D]. 杭州: 浙江大學, 2012.
[10] 王力, 黃科元, 黃守道, 等. 改進的永磁同步電機無傳感器快速啟動方法[J]. 電力電子技術, 2015, 49(7):62-64.
