基于滑模觀測器的PMSM模型預測控制
2018-03-07 23:18:12李超朱軍孫順新
電動工具
2018年1期
李超,朱軍,孫順新
( 1.山東醫學高等專科學校附屬醫院,山東 臨沂 276000;2.臨沂市恒源熱電集團有限公司,山東 臨沂 276000;3.天元建設集團有限公司,山東 臨沂 276000 )
0 引言
隨著全球經濟的快速發展,電動車成為了新能源背景下的重要產物。其驅動核心——永磁同步電機(Permanent magnet synchronous motor)的控制成為研究的關鍵。永磁同步電機具有體積小,結構簡單,效率高,輸出轉矩大,過載能力強等優點,傳統PMSM控制方法為PI控制,其參數調整依賴于操作者的經驗,在電汽車的驅動中已經不能滿足交流伺服系統的高性能要求。
預測函數控制(Predictive Functional Control,PFC)作為一種模型預測控制方法,具有控制量計算方程簡單,實時控制計算量小,跟蹤精度高等特性,已經廣泛應用于現代生產過程控制中。近年來,國內研究學者對該模型預測控制進行了大量的研究。本文針對PMSM控制系統的控制精度及動態響應要求的問題,提出了帶擾動補償的PMSM模型預測控制策略。利用模型預測控制方法,設計預測速度控制器,提高了電流環跟蹤精度和電機啟動性能。為提高系統的抗擾性能,設計離散滑模擾動觀測器,有效地估計外部擾動并對系統進行前饋補償,提高了系統的魯棒性。仿真及實驗結果驗證了該方法的有效性。
1 數學模型
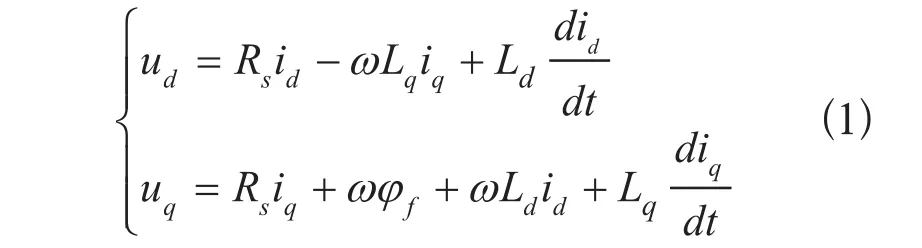
以PMSM為控制對象,假定永磁體無阻尼作用且空間磁場呈正弦分布,忽略磁滯和渦流損耗的條件下,P采用id=0的矢量控制方式的數學模型為
PMSM轉矩方程為:

PMSM運動方程為:

式中:ud,uq分別為d,q軸電壓;id,iq分別為d,q軸電流;Ld,Lq分別為d,q軸電感;……
登錄APP查看全文
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
數學物理學報(2020年2期)2020-06-02 11:29:24
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
光學精密工程(2016年6期)2016-11-07 09:07:19
核科學與工程(2015年4期)2015-09-26 11:59:03