帶有自尋優(yōu)調(diào)整因子的模糊控制系統(tǒng)設(shè)計(jì)
2018-03-10 02:57:50張秋穎張文鋼
船電技術(shù) 2018年2期
張秋穎,龍 松,張文鋼
?
帶有自尋優(yōu)調(diào)整因子的模糊控制系統(tǒng)設(shè)計(jì)
張秋穎,龍 松,張文鋼
(武昌首義學(xué)院基礎(chǔ)科學(xué)部,武漢 430064)
提出了一種帶有調(diào)整因子的模糊控制系統(tǒng)的調(diào)整因子自尋優(yōu)方法,仿真結(jié)果表明,此種控制方法與傳統(tǒng)PID控制方法相比,在穩(wěn)定性、快速性和適應(yīng)性方面均有提高。
模糊數(shù)學(xué) 模糊控制 調(diào)整因子 自尋優(yōu)
0 引言
自動(dòng)控制的產(chǎn)生來源于人們對(duì)生產(chǎn)過程自動(dòng)化的需求,既可以減輕人們的勞動(dòng)強(qiáng)度,又可以提高生產(chǎn)效率和產(chǎn)品質(zhì)量。隨著科學(xué)技術(shù)的迅猛發(fā)展,被控對(duì)象變得日益復(fù)雜,被控對(duì)象的非線性、時(shí)變性、不確定性等使得難以建立其精確的數(shù)學(xué)模型,即使建立了非常復(fù)雜的數(shù)學(xué)模型,也難以用于實(shí)際的控制系統(tǒng)設(shè)計(jì),這就使得基于被控對(duì)象精確數(shù)學(xué)模型的經(jīng)典控制理論和現(xiàn)代控制理論受到了嚴(yán)峻的挑戰(zhàn)[1]。
面對(duì)難以用傳統(tǒng)控制理論控制的復(fù)雜對(duì)象,具有一定操作經(jīng)驗(yàn)的人員采用人工控制的方法往往能取得滿意的控制效果。這些操作人員不需要對(duì)象的數(shù)學(xué)模型,只憑借操作經(jīng)驗(yàn),借助簡單的儀表對(duì)被控對(duì)象進(jìn)行觀測和分析,并通過執(zhí)行機(jī)構(gòu)對(duì)被控過程加以調(diào)節(jié),從而實(shí)現(xiàn)復(fù)雜對(duì)象的有效控制。智能控制是借助于計(jì)算機(jī)模擬人對(duì)難以建立精確數(shù)學(xué)模型的復(fù)雜對(duì)象的智能控制決策行為,基于控制系統(tǒng)的輸入輸出數(shù)據(jù)的因果關(guān)系推理,實(shí)現(xiàn)對(duì)復(fù)雜對(duì)象計(jì)算機(jī)閉環(huán)數(shù)字控制的技術(shù)。本文研究的模糊控制技術(shù)即是智能控制技術(shù)的一個(gè)重要方向,主要討論帶有自尋優(yōu)調(diào)整因子的模糊控制系統(tǒng)的設(shè)計(jì)技術(shù)。
1 模糊數(shù)學(xué)和模糊控制
模糊控制系統(tǒng)應(yīng)用模糊數(shù)學(xué)的方法模擬人的模糊邏輯思維對(duì)未知精確數(shù)學(xué)模型的被控對(duì)象進(jìn)行控制。其基本組成如圖1所示,其中模糊控制器包括模糊化、模糊規(guī)則、模糊推理和非模糊化4個(gè)模塊,廣義被控對(duì)象包括執(zhí)行機(jī)構(gòu)和被控對(duì)象。

圖1 模糊控制系統(tǒng)框圖
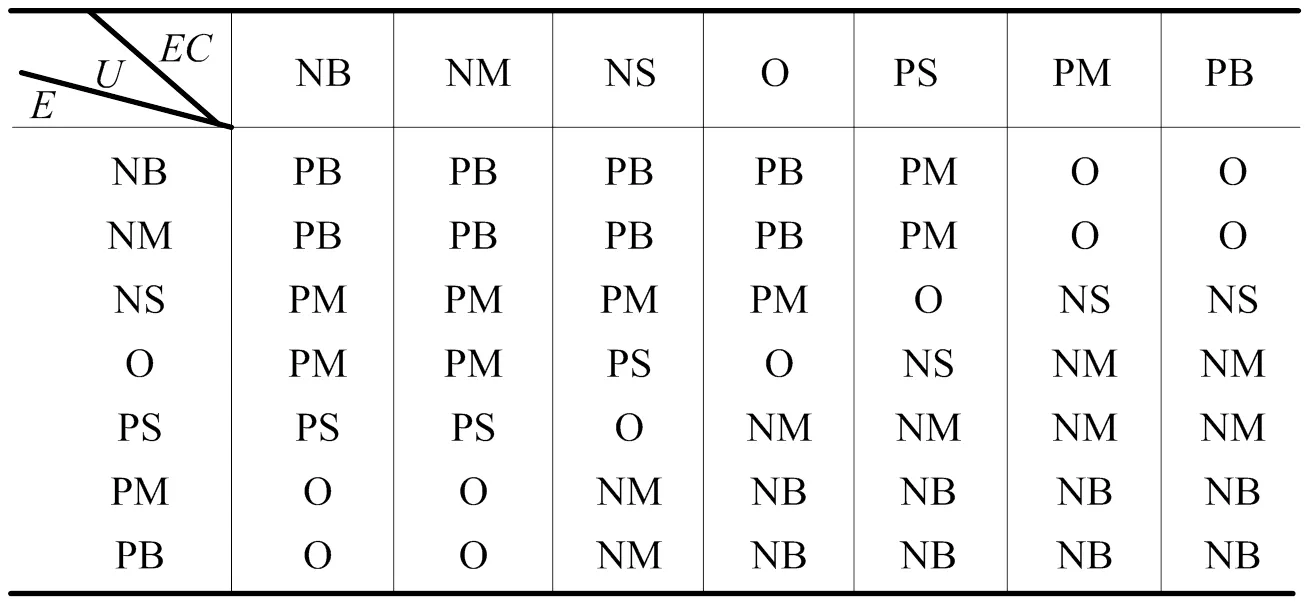
圖中,模糊控制規(guī)則模擬了人對(duì)被控對(duì)象的控制作用,是模糊控制器的核心。模糊集合一般根據(jù)習(xí)慣確定為:
{負(fù)大,負(fù)中,負(fù)小,零,正小,正中,正大}
或:
{NB,NM,NS,O,PS,PM,PB}
進(jìn)埔站#1、#2、#3接地變和#1、#2站用變保護(hù)裝置統(tǒng)一使用351F,351F為由微機(jī)實(shí)現(xiàn)的數(shù)字式保護(hù)、測控一體化裝置,實(shí)現(xiàn)饋電線路的保護(hù),完成遙測、遙信、遙控、遙脈等運(yùn)動(dòng)功能。351F采用標(biāo)準(zhǔn)6U(半層)機(jī)箱,由交流(WB511)、電源(WB560)、CPU(WB520)、操作(WB540)等4個(gè)插件
這樣,根據(jù)人對(duì)被控對(duì)象的控制方法,得到模糊控制規(guī)則表如表1。

圖2 模糊控制器信息處理過程
在實(shí)際應(yīng)用中,一般將控制規(guī)則結(jié)合論域轉(zhuǎn)化為一個(gè)控制表,存儲(chǔ)在計(jì)算機(jī)中用于在線控制。若各量論域選擇為[-3,3],則根據(jù)模糊控制規(guī)則表可得模糊控制表如表2。
表1 模糊控制規(guī)則表
2 調(diào)整因子的自尋優(yōu)計(jì)算方法
表2可寫成解析形式:

為適應(yīng)不同被控對(duì)象的要求,在式(1)的基礎(chǔ)上引進(jìn)一個(gè)調(diào)整因子,得到帶有調(diào)整因子的控制規(guī)則:

的確定一般是根據(jù)經(jīng)驗(yàn)或?qū)嶒?yàn)調(diào)試結(jié)果,具有一定的盲目性,本文提出一種基于黃金分割法的調(diào)整因子自尋優(yōu)計(jì)算方法,步驟如下[3]:
2)設(shè)置的尋優(yōu)區(qū)間[0,0];
3)按下式計(jì)算兩個(gè)尋優(yōu)點(diǎn):

4)繼續(xù)縮小區(qū)間,直至b-a≤,得到性能指標(biāo)最小點(diǎn)α。
黃金分割尋優(yōu)法的優(yōu)點(diǎn)是收斂速度快,不要求性能函數(shù)可微,且每次迭代只需計(jì)算一次函數(shù)值,計(jì)算量小,程序簡單。
3 仿真和對(duì)比
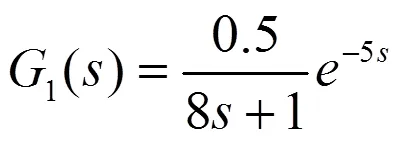
實(shí)際系統(tǒng)中,被控對(duì)象一般是帶有滯后的慣性環(huán)節(jié),所以選取控制對(duì)象傳遞函數(shù)為:
控制系統(tǒng)框圖如圖3。
表2 模糊控制表
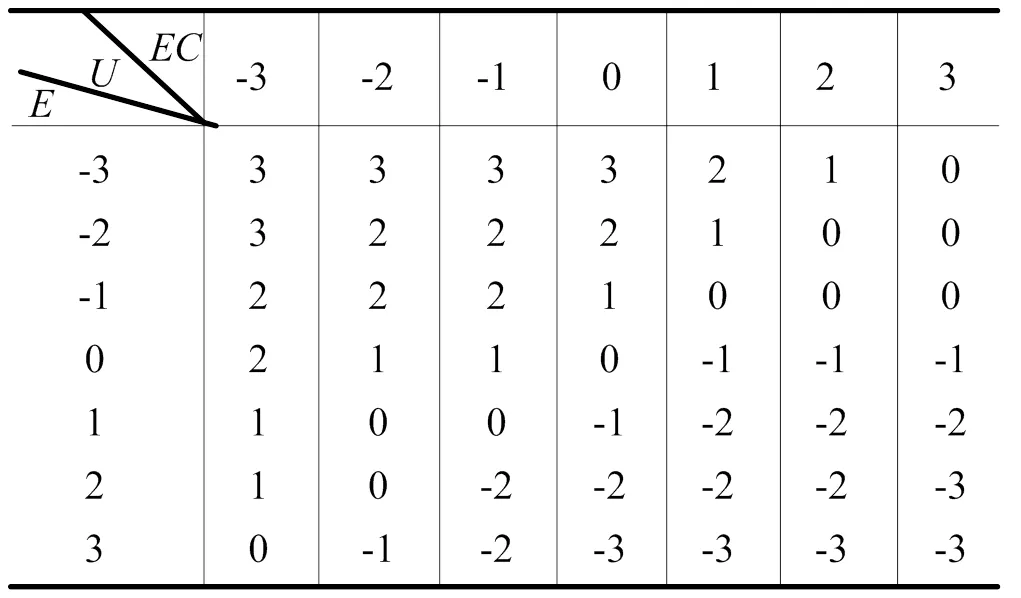
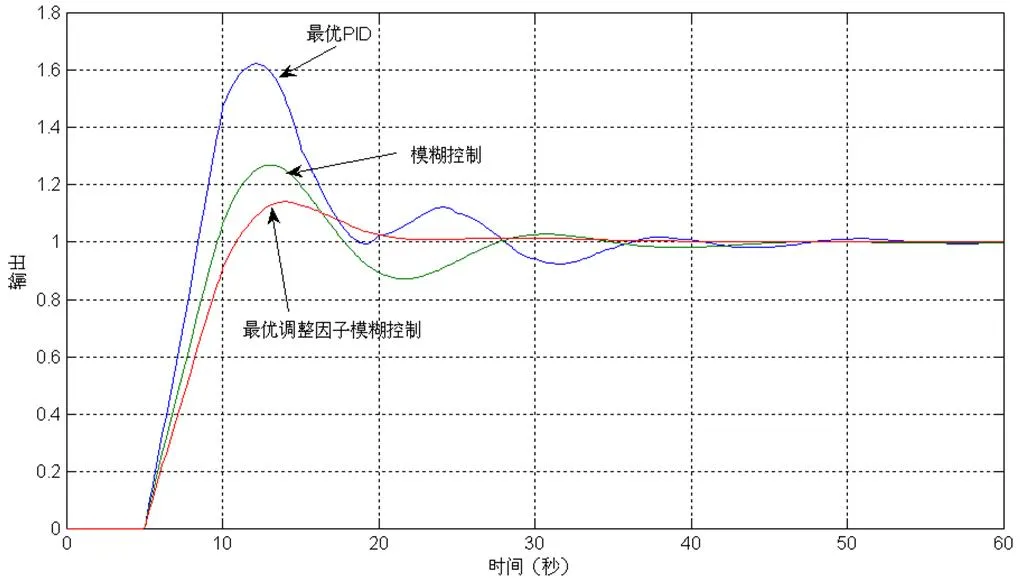
圖4 階躍響應(yīng)仿真圖
為便于對(duì)比,圖3包括3個(gè)控制系統(tǒng):一是IAE性能指標(biāo)最優(yōu)的PID控制系統(tǒng);二是采用式(1)模糊規(guī)則的模糊控制系統(tǒng);三是采用最優(yōu)化調(diào)整因子的模糊控制系統(tǒng)。其中,為消除模糊控制系統(tǒng)的穩(wěn)態(tài)誤差,在模糊控制系統(tǒng)中加入了積分環(huán)節(jié)。由于采用了黃金分割尋優(yōu)法,收斂速度較快,在尋優(yōu)區(qū)間為[0,1]、取0.01時(shí),經(jīng)過8次迭代即可確定α=0.41。
各系統(tǒng)階躍響應(yīng)曲線如圖4所示,從仿真結(jié)果看,模糊控制在響應(yīng)時(shí)間、超調(diào)量等方面優(yōu)于最優(yōu)PID控制,而帶有最優(yōu)調(diào)整因子的模糊控制又優(yōu)于普通的模糊控制,最優(yōu)PID控制、普通的模糊控制、最優(yōu)調(diào)整因子的模糊控制的IAE指標(biāo)分別是11.56、9.72、8.80,也證明了帶有最優(yōu)調(diào)整因子的模糊控制的優(yōu)勢(shì)。
下面通過改變被控對(duì)象傳遞函數(shù)參數(shù)驗(yàn)證控制系統(tǒng)的適應(yīng)性。一是改變被控對(duì)象的參數(shù),如式(4),一是改變系統(tǒng)的結(jié)構(gòu),如式(5),最優(yōu)PID控制系統(tǒng)和最優(yōu)調(diào)整因子模糊控制系統(tǒng)的仿真結(jié)果如圖5、6所示。
從仿真結(jié)果看,基于被控對(duì)象準(zhǔn)確數(shù)學(xué)模型的PID控制在被控對(duì)象參數(shù)和結(jié)構(gòu)的變化后,控制已經(jīng)不穩(wěn)定,基本沒有適應(yīng)能力。而帶有最優(yōu)調(diào)整因子的模糊控制適應(yīng)能力較強(qiáng),在被控對(duì)象參數(shù)和結(jié)構(gòu)變化后,也能獲得較好的控制效果。
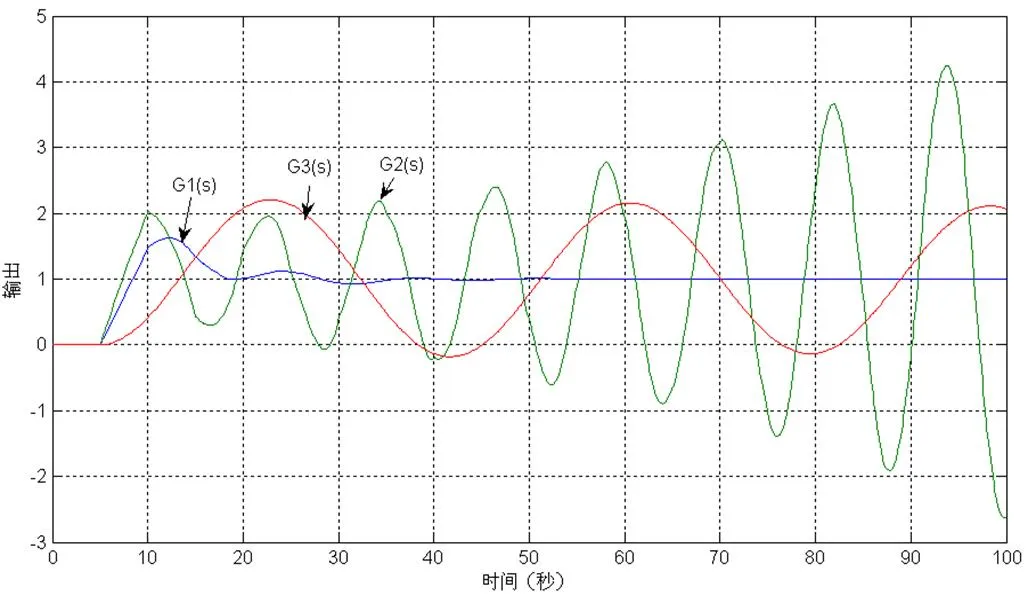
圖5 參數(shù)和結(jié)構(gòu)變化對(duì)最優(yōu)PID控制的影響
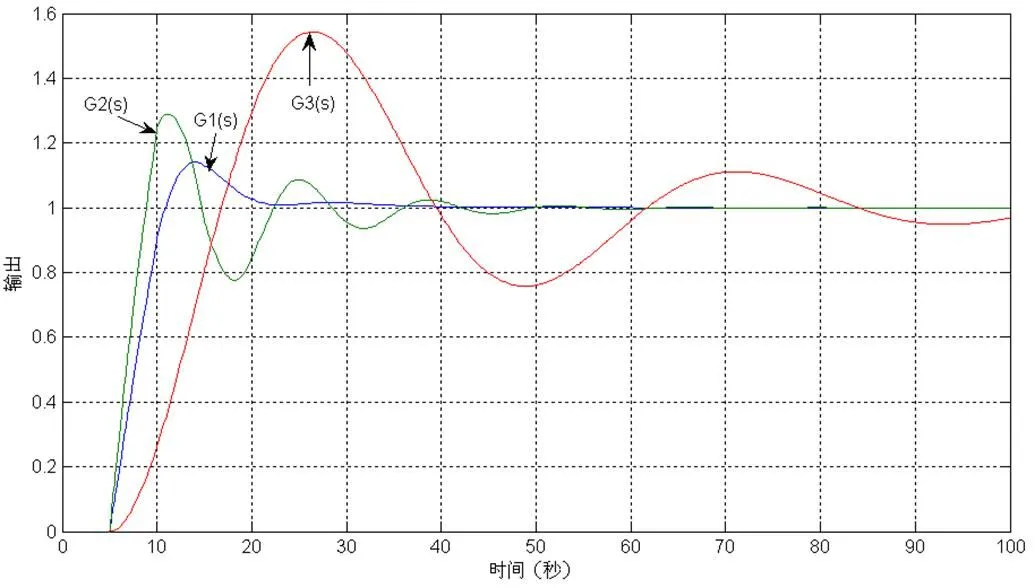
圖6 參數(shù)和結(jié)構(gòu)變化對(duì)最優(yōu)調(diào)整因子模糊控制的影響
4 結(jié)束語
本文主要研究了帶有調(diào)整因子的模糊控制系統(tǒng)中調(diào)整因子的自尋優(yōu)方法,并通過仿真對(duì)比證明了其準(zhǔn)確性和可靠性。此外,還應(yīng)強(qiáng)調(diào),為了與傳統(tǒng)PID控制進(jìn)行比較,文中給出了被控對(duì)象的數(shù)學(xué)模型,在實(shí)際應(yīng)用中,對(duì)于難以獲得被控對(duì)象精確數(shù)學(xué)模型的系統(tǒng),傳統(tǒng)控制方法是無能為力的,只有通過模糊控制等智能控制方法才能實(shí)現(xiàn)有效控制,這是模糊控制等智能控制相對(duì)于傳統(tǒng)控制的最大優(yōu)勢(shì)。
[1] 李士勇, 李研. 智能控制[M]. 北京: 清華大學(xué)出版社, 2016: 3-15
[2] 謝季堅(jiān), 劉承平. 模糊數(shù)學(xué)方法及其應(yīng)用[M]. 武漢:華中科技大學(xué)出版社, 2017: 1-5
[3] 李國勇. 最優(yōu)控制理論及參數(shù)優(yōu)化[M]. 北京: 國防工業(yè)出版社, 2006: 213-218.
Design of Fuzzy Control System with Self-optimizing Adjusting Factor
Zhang Qiuying, Long Song, Zhang Wengang
(Basic Science Ministry of Wuchang Shouyi University, Wuhan 430064, China)
TP273
A
1003-4862(2018)02-0057-04
2017-11-20
張秋穎(1986-),女,講師。研究方向:基礎(chǔ)數(shù)學(xué)。zhangqiuyingais@163.com
猜你喜歡
小獼猴智力畫刊(2022年3期)2022-03-29 01:09:42
數(shù)學(xué)小靈通(1-2年級(jí))(2021年4期)2021-06-09 06:26:14
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
Coco薇(2017年11期)2018-01-03 20:59:57
暨南學(xué)報(bào)(哲學(xué)社會(huì)科學(xué)版)(2016年9期)2017-01-15 13:52:02
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34