基于融合算法的GPS/UWB/MARG協同定位系統研究
2018-03-13 21:34:59周群沈重張鯤陳小斯鄭理強
現代電子技術
2018年6期
周群+沈重+張鯤+陳小斯+鄭理強
摘 要: 為了彌補在不同場景下切換時目標丟失的盲區,提出GPS/UWB/MARG的協同定位系統,實現城區建筑間混合場景下的無縫定位。在混合場景下采用一種加權融合算法實現GPS和UWB協同定位,MARG用以輔助提高GPS定位精度,先對單一子系統進行數據優化和性能分析后,以加權融合的方式處理GPS/MARG數據和UWB數據,自主判斷在不同定位環境下的數據輸出的最優定位信息。結果表明,協同定位系統在混合場景下平均定位精度相比于GPS/MARG系統提高了64%,定位精度更高同時拓展了單一定位系統的應用場景。
關鍵詞: 全球定位系統; 超寬帶; 組合定位; 加權融合; 圓概率誤差; Kalman濾波
中圖分類號: TN967.1?34 文獻標識碼: A 文章編號: 1004?373X(2018)06?0082?05
Abstract: To make up the blind zone in which target loses while switching between different scenarios, a cooperative positioning system based on GPS/UWB/MARG is proposed to realize seamless positioning between urban buildings in hybrid scene. A weighted fusion algorithm is adopted in hybrid scene to achieve cooperative positioning of GPS and UWB. MARG is used to auxiliarily improve GPS positioning accuracy. After data optimization and performance analysis for the single subsystem, GPS/MARG data and UWB data are processed in the mode of weighted fusion. The optimal positioning information of output data in different positioning environments is autonomously determined. The results show that the average positioning accuracy of cooperative positioning system in hybrid scene is increased by 64% in comparison with that of GPS/MARG system, and meanwhile the application scenarios of single positioning system are expanded.
Keywords: GPS; ultra?wideband; combination positioning; weighted fusion; circular probability error; Kalman filtering
室外環境的定位技術主要以全球導航衛星系統(Global Navigation Satellite System,GNSS)為主,由于其易用性和廣泛覆蓋性被廣泛應用在戶外[1],但精準度卻容易受到環境的影響。室內定位技術中,UWB(Ultra?Wideband)能在寬頻上發送一組極窄的低功率脈沖,使得UWB的抗干擾性優于傳統窄帶寬的無線解決方案[2]。UWB定位精度可達到厘米級,遠遠高于其他室內定位技術,卻受限于應用范圍小。
基于微電子機械系統MEMS(Micro?Electro?Mechanical System)技術的傳感器MARG(Magnetic, Angular, Rate and Gravity)傳感器在智能終端上得到了普遍的運用。其優點是成本低、自主式定位和短時間內定位精度高;但存在傳感器噪聲和累積誤差,無法長期獲得穩定可靠的定位信息[3]。GPS/MARG組合定位彌補了GNSS的不足,提高了GPS的定位精度。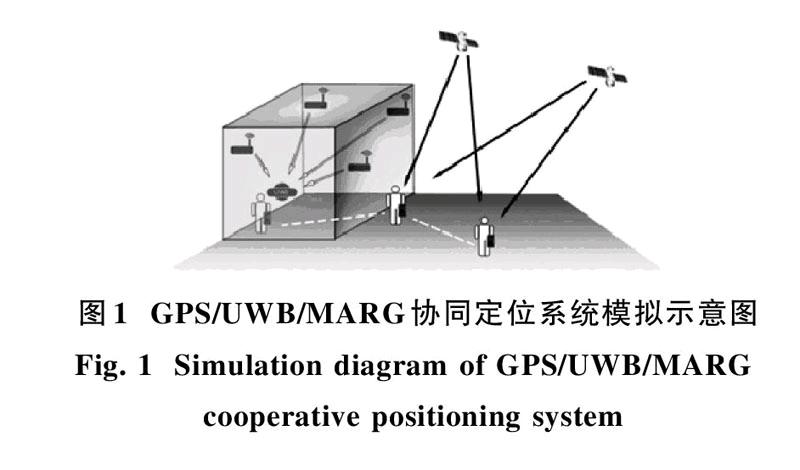
1 協同定位系統的設計
本文提出一種GPS/UWB/MARG協同定位系統,在室外場景下,GPS/MARG組合定位相互彌補和校正了系統誤差。……
登錄APP查看全文
