基于動態識別ROI區域的車道線檢測技術
2018-03-14 02:05:22劉曉楠陳文進劉杰
汽車科技 2018年7期
劉曉楠 陳文進 劉杰
摘要:車道線檢測是智能網聯汽車的關鍵技術,傳統車道線檢測方法易受到復雜背景信息中非車道線直線段的影響,造成車道線檢測的魯棒性和識別率不佳。為了提高車道線檢測的魯棒性和準確率,本文通過動態識別ROI區域,剔除非車道線的圖像RGB信息,限制Hough變換檢測空間,提出一種基于動態識別ROI區域的車道線檢測技術。通過實驗表明,相對于傳統方法,該技術能有效的濾除背景圖像中建筑物,車輛和信號塔等非車道線直線段的影響,提高車道線檢測的魯棒性。
關鍵詞:動態識別ROI區域;圖像RGB信息;車道線檢測;魯棒性;Hough變換
隨著智能網聯時代的到來,自動駕駛將成為汽車行業發展的必然趨勢。各大主機廠和互聯網企業都在布局自己的自動駕駛產業和發展自身的白動駕駛技術。自動駕駛的發展主要有兩種路線,一種是穩妥路線,從輔助駕駛向自動駕駛慢慢過渡,一種是激進路線,直接從最高級的自動駕駛開始研究。但無論哪種發展路線,都要實現基本的車道線檢測功能,車道線識別的準確性,實時性和魯棒性直接影響車輛行駛的安全性和可靠性[1,2]。
目前車道線檢測的基本方法是將從攝像頭獲得的圖像進行灰度處理,提取圖像的邊緣信息,然后利用Hough變換進行直線段檢測[3-5],最終識別出車道線[6-8]。但對于比較復雜的道路環境,現有的車道線檢測方法容易受到復雜背景中非車道線直線段的干擾,造成計算量大,實時性差,檢測結果的魯棒性和識別率不佳。
針對復雜背景噪聲的干擾,為了減少計算量,提高車道線檢測的魯棒性和識別率,本文提出一種基于動態識別ROI區域的車道線檢測方法。該方法通過動態識別和優化地面榆測ROI區域,剔除車道線外的圖像RGB信息,限制Hough變換檢測空間,提高車道線檢測的魯棒性和識別的正確性。
1 車道線檢測基本原理
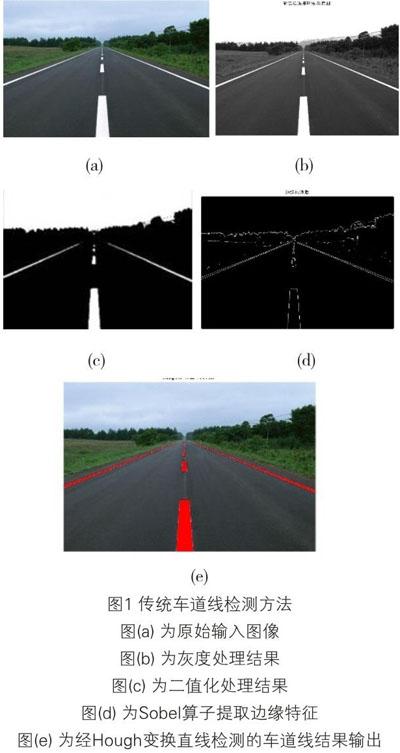
傳統的車道線檢測方法如圖1所示,主要分為:圖像灰度化處理,二值化處理,邊緣提取,直線檢測和輸出車道線識別結果。首先將攝像頭采集到的圖像進行灰度和二值化處理,即將RGB彩色圖像轉換為灰度圖像,并通過設定的閾值將像素點的灰度值設置為0或255,獲得仍然可以反映圖像整體和局部特征的二值化圖像[9,10]。其次利用邊緣柃測算法,提取圖像中亮度變化明顯的邊緣特征信息,剔除不相關信息從而減少數據量,并保留圖像中的重要結構屬性[11,12]。然后利用Hough變換檢測圖像中的直線段,并標注車道線的輸出結果。
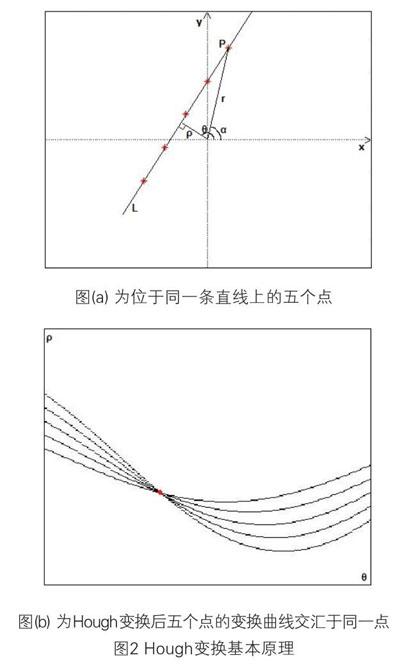
Hough變換[13-15]是在計算機視覺領域廣泛應用的直線段檢測方法。其基本思想是將原始圖像由圖像空間坐標變換到參數空間坐標,即直線上的所有點經過Hough變換后,在參數空間中都相交于一點。圖2 (a)所示為圖像空間的任一直線L,點P為直線L上的任意一點,該點的直角坐標為(x,y),極坐標為(α,r)。定義該直線與原點的距離為極徑D,該直線的垂線與x軸正方向的夾角為極角θ,則極徑ρ可表示為:
ρ=r×cos(θ-a)=r×cos(θ)cos(a)+r×sin(θ)sin(a) (1)
根據直角坐標和極坐標的關系x =r×cos(α),y=r×sin(α),可得到直線的極坐標方程:
ρ=xxcos(θ)+yxsin(θ) (2)
因此,每一組參數ρ和θ唯一的確定一條直線,日.該直線在參數空間極坐標內為一個點。圖2(a)中位于直線上的五個點映射到參數空間后為五條曲線,且五條曲線相交于一點,其參數空間的坐標即為(θ,ρ),如圖2(b)所示。因此,通過Hough變換可以將圖像空間中的直線映射到參數空間的一個點,從而直線的檢測問題轉化為經過交點曲線的峰值統計問題。
2 車道線檢測改善方法
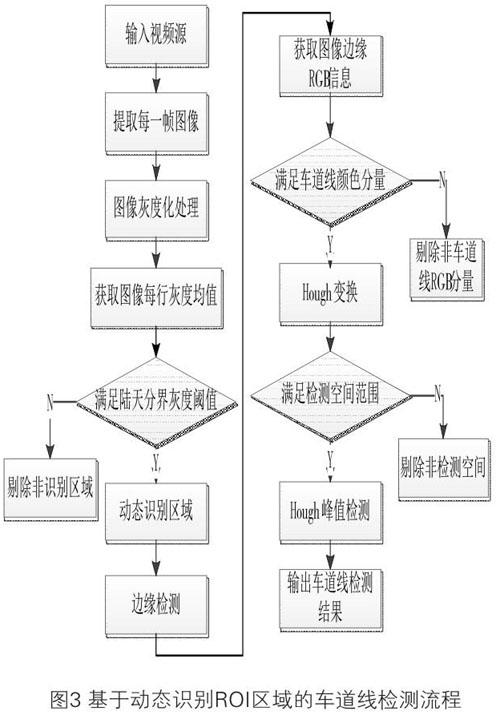
對于傳統的車道線柃測方法,往往由于車道線背景噪聲中非車道直線段的影響,使得車道線檢測的魯棒性不高,識別準確率不好。為了提高車道線檢測的魯棒性,減少背景噪聲的影響,本文提出基于動態識別ROI區域的車道線檢測改善方法,具體檢測流程如圖3所示。由檢測流程可知,相比傳統車道線榆測方法,本文的榆測技術主要通過動態優化圖像識別的檢測區域,減少識別目標圖像背景的噪聲,來提高輸入圖像的信噪比。
2.1 動態識別ROI區域
根據攝像頭的安裝位置,及其拍攝角度,攝像頭提供的原始圖片往往含有大量的天空,建筑,樹木等非道路路面的信息。若對原始圖片直接做數據處理,則車道線檢測受非道路路面信息的影響巨大,信噪比較低。傳統的方法一般是直接截取圖像的下半部分或者三分之一作為ROI識別區域,但對于下坡,上坡和彎道等路況往往不能準確界定道路路面和天空的分界線。本文根據圖像的灰度化處理結果,逐行計算每行的灰度平均值,動態預測和識別道路路面和天空的分界線,進而實現車道線檢測ROI區域的優化。圖4為原始攝像頭圖像經過動態識別ROI區域處理后,得到的車道線檢測區域。由處理結果可知,該措施有效的分離天空和地面,剔除了非道路路而信息,減少背景噪聲的影響,減少計算量提高計算效率。
2.2剔除非車道線RGB顏色分量
根據車道線檢測流程,將動態識別ROI區域處理后的圖像進行邊緣檢測,利用Sobel算法獲取圖像的邊緣信息如圖5(a)所示。由邊緣檢測結果可知,雖然成功提取了車道線的邊緣信息,但是仍然包含了很多非車道線的邊緣噪聲。根據車道線的顏色信息統計結果可知,道路上的車道線顏色信息基本均為白色或者黃色。對于白色車道線,其RGB顏色分量的取值范圍為R∈[200,255],C∈[200,255],B∈[200,255];對于黃色車道線,其RCB顏色分量的取值范圍為R∈[200,255],GE[200,255],B∈ [0,50]。因此本文基于車道線的RCB顏色分最閾值,利用邊緣檢測點的RGB信息,剔除不滿足車道線RGB顏色分量的邊緣信息。圖5(b)為剔除非車道線顏色分量后的邊緣檢測結果。由結果可知,通過處理后,進一步剔除了背景中不滿足車道線特征的噪聲信息,提高了識別圖像的信噪比。
2.3 限定Hough峰值檢測空間
經過動態識別ROI區域和剔除非車道線RCB顏色分量的處理后,對圖像進行Hough變換得到如圖6(a)所示的結果。由原始圖像可知,車道線集中于圖像中部,道路兩旁的建筑物,護欄,樹木和相鄰車道的車輛等均為車道線檢測的干擾因素。通過研究發現,非車道線的背景噪聲直線段通過Hough變換后,其極角θ值較大。因此,本文通過限定Hough變換峰值檢測的極角θ范圍,來避免過大極角所對應非車道線的干擾,提高峰值檢測的準確率。圖6(b)為限定Hough變換峰值檢測空間后的Hough變換結果。
3 實驗結果分析
為了驗證基于動態識別ROI區域車道線檢測技術的魯棒性,對圖7所示的視頻源,利用本文改進方法和傳統方法分別進行車道線檢測,實驗結果如圖7所示。實驗所用視頻源的分辨率為1280×720的高清視頻,圖a1實驗結果表明傳統方法受到背景建筑物的影響,圖b1為傳統方法受到背景信號塔的影響,圖c1為傳統方法受到背景車輛的影響,而圖a2,b2,c2為利用本文改進方法的檢測結果。由實驗對比結果可知,基于動態識別ROI區域的車道線檢測方法,能夠有效消除圖像中背景車輛,建筑物以及信號塔等非車道線直線段的影響,提高車道線檢測的魯棒性。
4 總結
本文針對傳統車道線檢測方法容易受到背景噪聲的影響,提出基于動態識別ROI區域的改進方法。該方法首先根據圖像每行的灰度平均值信息,分離出天空和道路路面的分界線,動態識別ROI區域;其次基于車道線的RCB顏色分量閾值,利用邊緣檢測點的RCB信息,剔除不滿足車道線RCB顏色分量的邊緣信息;最后通過限定Hough變換峰值檢測的極角θ范圍,避免過大極角所對應非車道線信息的干擾。實驗結果對比分析表明,相對于傳統的車道線檢測方法,本文所提方法能夠有效的消除圖像中背景車輛,建筑物以及信號塔等直線段的影響,顯著提高車道線檢測的魯棒性。
參考文獻:
[1]楊益,何穎基于RCB空間的車道線檢測與辨識方法[J].計算機與現代化,2014(2):86-90.
[2]劉獻如,蔡自興結構化道路車道線的魯棒檢測與跟蹤[J].光電子·激光,2010(12):1834-1838.
[3]Watanabe S, Seki M, Haga T Lane marks detection using particle filter based on voting results of hough transform[J]. Ieej Transactions on Electronics Infonnation& Systems, 2013. 133(7):1384-1391+14.
[4] Liu L. CuiJ,Ll J Lane Mark Deteaion Based on Improved Hough Transformation for Vehicle Electronic Technology [M]. Advances in Mechanical and Electronic Engineering. Springer Berlin Heidelberg,2012:593-598.
[5]李亞娣,黃海波,李相鵬,等基于Canny算子和Hough變換的夜間車道線檢測[J].科學技術與工程,2016, 16(31):234-237.
[6]Yi S C,ChenY C,ChangC H. A lane detection approach based on intelligent vision U]. Computers& Electrical Engineering, 2015, 42(C):23-29.
[7] Zhang JJia X, Li J Integration of scanning and unage processing algomhms for lane detection based on fuzzy method [J]. lournal of Intelligent&Fuzzy Systems, 2015, 29(6):2779-2786.
[8]楊智杰基于RGB彩色通道的結構化道路車道線檢測[J].電子科技,2015, 28(1):95-98.
[9]劉富強,張姍姍,朱文紅,等一種基于視覺的車道線檢測與跟蹤算法[J].同濟大學學報自然科學版,2010, 3S(2):223-229.
[10]朱淑亮,劉衛國,于濤,等結構化道路圖像預處理技術[J].現代制造工程, 2015(12):97-102
[11]范延軍,張為公基于雙向窗口特征提取技術的車道線檢測算法[J].吉林大學學報信息科學版,2015, 33(4):485-493.
[12]易世春,李克強,郭君斌,等基于邊緣分布及特征聚類的車道標記線檢測[J].汽車工程,2014(10):1210-1215.
[13]Duda R 0, HaLtP E Use ofthe Hough transformation to detect lines and curves in pictures [M]. Communications of the ACM, 1972, 15(1):11-15.
[14] Hardzeyeu V,Klefenz F On using the hough transform for driving assistance applications[C] International Conference on Intelligent Computer Communication and Processing. IEEE, 2008:91- 98
[15]趙穎,王書茂,陳兵旗基于改進Hough變換的公路車道線快速檢測算法[J].中國農業大學學報,2006, 11(3):104-108.