多旋翼無人機堆狀體航空攝影測量
2018-03-15 09:34:37萬曉磊
建材與裝飾 2018年7期
魏 升 鄭 杰 萬曉磊
(山東省地礦工程勘察院 山東濟南 250014)
引言
隨著無人機測量技術的不斷發(fā)展,給無人機飛行器的研究提出了更高的要求。傳統(tǒng)的固定翼無人機由于存在一些缺陷,使其無法滿足航空攝影測量中的要求。而多旋翼無人機不僅機動性高,而且適應性強,可以完成各種復雜區(qū)域的航空攝影測量工作,同時其拍攝影像清晰度高,可以為后續(xù)的分析和研究提供巨大便利。然而多旋翼無人機在實際的應用過程中還是不可避免的會出現(xiàn)一些不足,所以還需要加大其研究力度,從而促進我國航空攝影測量工作的進一步發(fā)展。
1 無人機飛行器分類
無人機飛行器涉及的種類較多,根據(jù)機翼的不同,大體可以將其分為以下兩種:①固定翼飛行器。固定翼飛行器最早應用于軍事方面,在二戰(zhàn)期間發(fā)揮了巨大的軍事作用。自此,固定翼飛行器得到了各個國家的高度重視,逐漸將固定翼飛行器應用到民用行業(yè),形成為航空系統(tǒng),給人們的出行帶來了極大地便利。除此之外,固定翼無人機主要應用在地形偵查方面,可以快速發(fā)現(xiàn)敵方目標,這也就是它被廣泛應用于軍事方面的原因所在;②多旋翼飛行器。相對比固定翼飛行器,多旋翼飛行器的結構較為復雜,加之難以控制,使得早期對于多旋翼飛行器的研究較少。但是由于多旋翼飛行器的飛行原理相對比固定翼飛行器而言較為簡單、智能化水平較高,同時它具有多樣化的飛行姿態(tài),可以適應各種復雜的環(huán)境。因此,多旋翼飛行器具有較高的研究價值,將成為未來飛行器發(fā)展的重要代表。
2 多旋翼無人機的應用現(xiàn)狀
①環(huán)境監(jiān)測中的應用。傳統(tǒng)的環(huán)境監(jiān)測難度較大,對于一些復雜的區(qū)域很難進行有效的監(jiān)測和管理,而多旋翼飛行器則不同,它可以通過無線遙感進行遠程操控,不需要工作人員進行實地深入,所以一方面減輕了工作難度,另一方面也降低了危險的發(fā)生概率。工作人員只需要根據(jù)飛行器發(fā)出的信號進行接收和判斷,以完成相關的環(huán)境監(jiān)測任務,這極大地提高了監(jiān)測效率;②低空偵查方面。由于多旋翼飛行器可以實現(xiàn)低空監(jiān)控,而且還可以結合紅外線設備進行能見度較低環(huán)境下的拍攝,這對于偵查事業(yè)的發(fā)展有著巨大的推動作用;③軍用方面。除了商業(yè)方面的應用外,多旋翼飛行器在軍用方面的應用效果更為顯著,一般情況下多旋翼飛行器可以用作軍事突襲,即將飛行器上放置大型殺傷力設備,例如炸彈等,通過遠程操控可以將其深入敵軍內部,完成突襲任務。由于多旋翼飛行器結構簡單,體積輕巧,所以其在軍事方面的應用前景較為巨大;④信號干擾方面。在軍事方面除了突襲外,多旋翼飛行器還常常用作信號干擾的設備,通過將其深入敵軍軍事范圍內,利用其攜帶相關的設備,實現(xiàn)對敵軍的信息干擾,達到相應的軍事目的。
3 多旋翼無人機航空攝影測量的應用
3.1 工程概況
某縣級公路在發(fā)生三次大規(guī)模滑坡后,當?shù)卣{查人員對其采取了勘察,重點對第三次滑坡進行勘察,在完成公路邊坡加固后,利用多旋翼無人機對其進行攝影測量。
3.2 多旋翼無人機低空攝影
本次研究所使用的多旋翼無人機承載量為5kg,相機像素為1200萬,具備GPS導航功能,同時可設置飛行路線,便于工作人員操控和低空攝影測量。此次的公路邊坡加固工程完成后,進行了多旋翼無人機的航空攝影測量工作。經(jīng)過反復試驗,選定的飛行路線大體與坡面平行。此飛行路線不同于《低空數(shù)字航空攝影規(guī)范》(CH/Z3005-2010)中要求的路線,例如相對于坡腳的實際飛行高度不超過100m,而邊坡的最大高差超過70m,因此實際飛行高度遠低于規(guī)范的要求。為了確認關鍵部位的情況,從不同角度和高度對同一部位進行多次拍攝,導致飛行路線出現(xiàn)交叉。攝影過程中通過GPS記錄每張照片的拍攝位置,但無法記錄影像旋偏角。此次測量共獲取照片125張,在影像處理時所有照片全部可用[1]。
3.3 影像處理
目前影像處理軟件眾多,本研究采用商業(yè)軟件Pix4D,它可以自動完成空三、生成DOM和DSM等工作。處理的照片越多計算量越大,且耗時越多。在本研究中采用的計算機為個人用臺式計算機,刺控制點的工作完成后,計算機共用2h,得到的DOM如圖1所示。
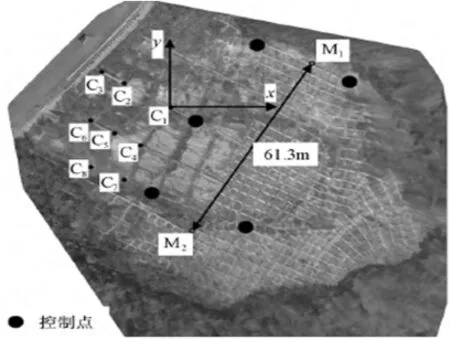
圖1 公路邊坡DOM
4 結束語
綜上所述,本次研究主要分析了多旋翼無人機在公路邊坡影像獲取中的應用,由于傳統(tǒng)的方法所得到的平面圖無法驗證公路邊坡加固方案的可行性,而多旋翼無人機所拍攝的照片在完成處理后,達到了預期的效果,具有很好地應用價值。
[1]潘海兵.多旋翼無人機控制與仿真[D].沈陽航空航天大學,2017.
[2]代君,管宇峰,任淑紅.多旋翼無人機研究現(xiàn)狀與發(fā)展趨勢探討[J].赤峰學院學報(自然科學版),2016,32(16):22~24.
[3]李誠龍.多旋翼無人機高空飛行穩(wěn)定控制問題研究[D].浙江大學,2016.
猜你喜歡
體育科技文獻通報(2022年3期)2022-05-23 13:46:54
天津外國語大學學報(2021年3期)2021-08-13 08:32:18
遼金歷史與考古(2021年0期)2021-07-29 01:06:54
科技傳播(2019年22期)2020-01-14 03:06:54
中學生數(shù)理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
民用飛機設計與研究(2019年4期)2019-05-21 07:21:24
中學生數(shù)理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數(shù)理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數(shù)學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
汽車工程學報(2017年2期)2017-07-05 08:13:02
