泉州市洛陽江古橋區域數字地形圖測繪及質量評價
2018-03-15 03:29:45吳貴明楊文競
城市勘測 2018年1期
吳貴明,楊文競
(泉州市規劃勘測研究院,福建 泉州 362000)
1 引 言
隨著GPS-RKT(實時動態定位系統)技術的日益成熟,RTK以其高精度、高效率、易操作的特點廣泛應用于各種測量和放樣。使用GPS-RTK技術進行水下地形測量相當方便、快捷。水下地形測量主要包括定位和測深兩大部分。對于一些不具備全站儀、RTK測設的地方,利用無人機進行地形測繪。
2 主要技術工作原理
2.1 GPS-RTK技術
RTK技術中應用的是載波相位動態實時差分技術,可以實現實時厘米級定位,是GPS定位技術新的發展與進步。隨著GPS-RTK技術的不斷發展,其在工程測量、測圖工程、地籍測量等領域的應用越發廣泛,引發了測量技術的革命。
RTK在作業過程中,基準站主要負責獲得觀測值、測站信息及各種數據,并通過數據鏈,將數據傳輸給流動站,通過流動站對差分觀測值進行實時處理,并計算出定位結果,其定位精度達到厘米級。GPS-RTK技術的應用,極大降低了操作強度,減少了測量作業人員數量,并可以在不具備通視條件的環境下作業,其測量精度較高,應用優勢十分明顯。
2.2 水下地形測量原理
水下地形測量包括兩部分:定位和水深測量目前的水下地形測量的主流技術定位采用的是GPS差分定位模式,水深測量采用的是回聲測深儀的方法。這樣就可以確定水底點的高程:
Gi=H-(D+△D)
(1)
式中,Gi為水底點高程,H為水面高程,D為測量水深,△D為換能器的靜吃水。
在觀測條件比較好的情況下,考慮RTK具備比較高的高程確定精度,同時嚴格考慮船姿的影響,無驗潮模式下的水底點高程可通過下式確定:
Gi=H-D-h-△a
(2)
式中,H為GPS相位中心的高程(通過RTK直接確定),h為GPS接收機天線相位中心距換能器面的垂距,△a為姿態引起的深度改正。
2.3 無人機生成DOM原理
利用無人機生產影像圖數據獲取周期較短,對天氣依賴性不強,可較靈活的獲取高分辨率影像數據。
通過航線設計、影像控制測量、外業航飛獲得圖像、POS數據和控制點數據,通過影像預處理、空三加密,其中空三加密主要包括內定向、相對定向、絕對定向、區域網平差計算。根據空三加密的成果,創建立體模型,通過核線重采樣制作核線影像生成DSM,進行房屋過濾生成DEM。最后利用DEM對影像進行糾正,進行一系列處理,得到DOM。
3 在水下測量中的應用
3.1 項目概況
(1)測區概況
為了更好地落實開展泉州市洛陽江古橋保護規劃工作,需對洛陽古橋所屬周邊地區,上下游紅樹林自然保護區和洛陽江河道部分進行 1∶2 000和1∶5 000比例尺的水下地形測量,測區位置范圍略圖如圖2所示。測區洛陽江洛陽古橋位于福建省泉州市,又稱為萬安橋,處于泉州鯉城區與惠安縣交界處,橫跨洛陽江的入海口。測區位置(地理坐標大致位置為:北緯24°55′50″、東經118°41′00″),沿江目前已建有 6 000多畝的省級紅樹林自然保護區、濕地自然保護區。測區內淤泥灘較多,小型的水道星羅棋布,養殖帶較多,潮差較小,河道中有大量的漁船行駛,給水下測繪帶來較大的不便。

圖2 測區位置范圍略圖
(2)儀器設備配備
本項目投入工程測量船一臺,發動機功率48匹,航速 4.5 km,主要用于單波束水深測量;投入無人機、RTK、聲速剖面儀、數字回聲測深儀、海測軟件、繪圖軟件、數據檢查軟件、測量船等軟硬件設備。
3.2 項目實施
(1)控制測量
福建省連續運行衛星定位服務系統(FJCORS),覆蓋本測區,考慮到FJCORS的精度能滿足本項目平面控制的基本要求,平面定位的數據直接采用FJCORS差分數據,作業期間提供了實時定位和事后精密定位等服務。同時,為保證網絡RTK獲取測點點位的準確性,首先利用測區附近泉州市C級GPS點Q028、Q030、Q032、620P進行RTK檢核,每天測量前應進行檢核測量,與已知成果進行比較,檢核精度在誤差允許范圍內,方可進行測量。每天測量完畢后,再次對已知點進行檢核,以保證測量成果的正確性。
(2)水深測量
為了確保測深儀參數輸入準確無誤,測區外業數據采集采用投影中央子午線為120°的CGCS2000坐標,水下地形測量采用RTK三維水深方式、單波束回聲測深儀等現代測繪技術手段。測量區域水下地形時,當船通過定位技術導航進入指定測區計劃測線上時,通過測深儀測量該點水深,坐標定位和測深同步記錄并以相應的數據格式保存,最后輸出數據。水下地形點的大地高經福建省似大地水準面精化模型改正轉換成1985國家高程基準,并采用專業軟件進行數據處理、成圖。
①主測深線布設
充分考慮測區甲方需求,按規范的要求布置測線。主測深線方向與水下等高線垂直,大部分測線為東西走向。檢查線的方向依照實際情況盡量與主測深線垂直,分布均勻,并布設在較平坦處,能普遍檢查主測深線。檢查線總長大于主測深線總長的5%。
②儀器安裝
測深作業時,將測深儀輸出接口、GPS定位輸出接口同時與計算機連接,實現定位、測深同步。考慮到測深過程中,船速的快慢會影響到吃水深淺的變化,根據以往經驗,測深儀換能器安裝在船舶中舷處,所受影響最小,因此測深儀換能器安裝在船舶中舷處。
③聲速采集
水下地形測量開始前,用Valeport minisvp聲速剖面儀測量測區水中的聲速,將測得的聲速值輸入到測深儀中用于測量水深。
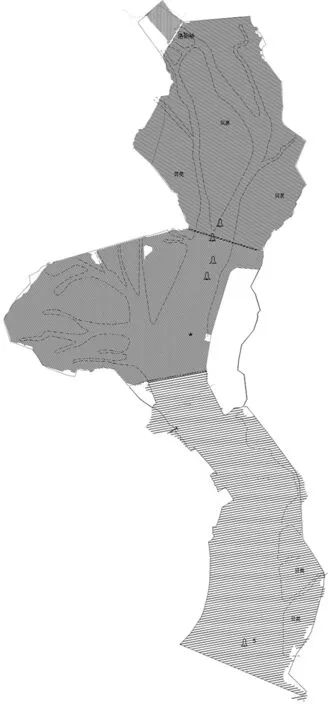
圖3 設計線布設圖(黑色為主測線、紅色為檢查線)
④動、靜吃水改正
動態吃水:本次水深測量采用GPS-RTK方法,GPS天線安裝在測深儀探頭上方,即GPS天線與測深儀探頭固定在一起,船舶行駛過程中的動態吃水對測深儀所采集數據的影響也通過實時潮位數據來抵消,因此,本次水深測量的動態吃水不需另外單獨改正。
靜態吃水:由于本次固定RTK采用長度為 2 m的鋼管,RTK測量中心到海底水深測量點的距離是一定的(為水深值加 2 m)。故本次靜態吃水的量取對測深點的高程值沒有影響。
⑤水深測量數據采集
本次作業水深數據采集使用中海達HD-380全數字雙頻測深儀(1套)一體機進行數據采集,采集數據自動存儲至計算機內,結合中海達水深后處理軟件進行數據處理。
測量船根據電腦屏幕上實時顯示實線的測量計劃線進行跑位,測量軟件進行實時定位和測深采集,并根據軟件的偏航顯示數據,隨時修正測船的航向,使測船始終沿著設計測線方向航行;船只在測線航行時,航向變化不大于5°/min。遇到特殊情況停船,轉向或變速時,應及時定位;每天對測深儀進行時間校準,使測深儀時間標記和定位時間保持同步。

圖4 水深測量航跡圖
(3)潮間帶地形測量
陸地和海島周邊潮間帶區域利用了1∶500泉州市航測數字化地形圖、1∶5 000數字線劃圖的成果結合LiDAR高程點數據。水深測量和 1∶500地形圖、LiDAR高程點數據均有必要的重疊區域,由水深測量獲得的高程與 1∶500地形圖、LiDAR高程點數據獲得的高程互差絕對值應不大于 0.3 m。重疊區域使用本次實測數據,未實測的區域采用該區域的 1∶500地形圖數據,無以上數據的區域采用LiDAR高程點數據。
(4)水下地形數字成圖
外業數據采集完成后,立即投入內業編輯與處理工作,內業編輯與處理使用CASS9.1成圖軟件,并處理成圖。
①聲速改正
測深儀測深前輸入的聲速剖面儀法計算獲得的聲速固定值。雖然聲速在水下的傳播速度是隨著深度的增加而增大,測區整體上以淺水區為主,最深的水深為 12.63 m,水深均在 20 m以內,故本項目數據后處理不做聲速改正。
②水深數據處理
由參加測量的外業人員對所測的外業資料進行全面檢查、校核,對海測軟件所采集的水深數據與電子測深圖譜上的打印值逐一進行校核,剔除跳點數據;對計算機采集的GPS定位數據逐一檢查,去除非固定解值,并校核無誤后進行測點高程計算。對水下地形測量中漏測地形特征點根據回聲記錄波形圖上記錄顯示,在原始每秒數據中摘取。
③水下地形圖的繪制
水下地形圖的水下部分使用實測檢查后無誤的水下高程點,利用CASS9.1構建三角網,生成水下等高線,對生成不合理的等高線進行編輯修改,最終編繪成圖。
由于CASS軟件未提供水下等高線的繪制,為了與陸地等高線區別,項目中將 0 m以下的水下等高線分別歸到水下等高線首曲線、水下等高線計曲線圖層,顏色為青色。

圖5 CASS9.1勾繪水下等高線效果圖
④水下地形圖的坐標轉換
利用CASS9.1自帶的坐標轉換功能,導入四個已知點數據,直接將整張圖先轉到中央子午線120°的1954年北京坐標系,再通過換帶計算把圖轉到泉州地方坐標系。
4 質量控制
4.1 質量保證體系
為有效完成各項任務,加強各分項目之間的工作協調能力,我院作為任務承擔單位由單位主管領導指揮,組成海洋測繪項目組,以ISO 9001∶2008標準要求,對整個工程實施過程進行全程控制和監督。
4.2 質量保證措施
項目中,遵循先設計后生產的原則,實行兩級檢查一級驗收的制度。
在作業過程中,項目外業負責人利用中海達的后處理軟件對小組核查編輯后的水深數據進行抽檢。
外業數據采集結束后,項目組組織專門質檢人員對RTK比對記錄、實測高程點范圍是否符合要求,潮間帶與水下測量是否有重疊、檢測線是否按設計(采用主、檢測線和潮間帶與水下測量重疊部高程比對)等進行了內業資料的完整性、成果數據圖件正確性檢查,并及時將檢查意見反饋于作業組,及時進行整改。本次檢查線與主測線長度之比為8.8,符合規范要求。
統計主測線與檢查線交叉點的高程比對,并計算點位高程中誤差。中誤差公式采用下式計算:
主、檢測線不符值限差規定:水深0 m~20 m時:小于 0.4 m;超限的點數不得超過參加比對總點數的20%。

高程檢測統計表 表2
滿足項目設計要求,質量合格。
項目完成后,由項目組所在科室進行院一級檢查,檢查合格后由院質檢科進行二級檢查,檢查合格后提交省質監站驗收。
5 技術問題處理
5.1 紅樹林邊界線問題
洛陽江古橋測區附近紅樹林具有密度大、分布無規律等特點,且實地有專人看護,不允許測船進入,又不具備全站儀、RTK確定林地邊界的條件,因此項目中利用了無人機獲取高分辨率影像圖來確定其范圍線。
5.2 關于養殖帶和養殖的水塘的繪制
測區養殖的種類復雜,海蠣樁的范圍結合水下地形測量中的部分定位點粗略繪制。蝦塘蟹塘等養殖的水塘依據無人機獲取高分辨率影像圖確定其范圍線和大小,再依據外業調查確定其養殖種類。
6 結 語
GPS-RTK以其高精度、高效率、易操作的特點廣泛應用于水下地形測量,大大提高了水下地形測量的效率和準確性。本項目中利用GPS-RTK和無人機測繪技術的有效結合,解決了不易獲取GPS信號測區的測繪。在復雜地形的水下地形測量時,尤其是對于不方便設站、測區內淤泥灘、養殖帶較多的水域,利用GPS-RTK和無人機的有效結合可以更方便精確地進行測量,提高測量的精確性,提高測繪效率。利用不同技術的結合使用將是以后測量技術發展的一個新方向。
[1] 周忠謨. GPS衛星測量原理與應用[M]. 測繪出版社,1992.
[2] 付青松. 應用GPS RTK技術的城市工程測量方法研究[J]. 測繪與空間地理信息,2011(1):75~77.
[3] 梁開龍. 水下地形測量[J]. 測繪通報,2001(6):16~16.
[4] 李俊,黃永. GPS RTK技術在水下地形測量中的應用[J]. 水電能源科學,2008(1):88~89.
[5] 孫杰,林宗堅,崔紅霞. 無人機低空遙感監測系統[J]. 遙感信息,2003(1):49~50.
[6] 趙翔. 基于無人機航攝DOM生成技術的研究與應用[D]. 南昌:東華理工大學,2015.
猜你喜歡
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
浙江國土資源(2019年10期)2019-10-31 03:17:00
建材發展導向(2019年10期)2019-08-24 06:25:28
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
江西建材(2018年4期)2018-04-10 12:37:38
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
中國公共安全(2017年7期)2017-10-13 08:18:11
電子制作(2017年9期)2017-04-17 03:01:00
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21