一種基于單片機的智能玩具挖掘機
2018-03-15 09:13:42吳斌李文謹
科技視界 2018年1期
吳斌 李文謹


【摘 要】本設計是以智能玩具挖掘機模型為控制對象,通過STC12C5A60S2單片機控制整個系統,HC-SR04超聲波傳感器作為檢測模塊,通過舵機控制挖斗,由單片機發出指令,使小車完成自動行駛、自動檢測物體、自動挖掘的功能。
【關鍵詞】單片機;挖掘機;智能
中圖分類號: TP273.5 文獻標識碼: A 文章編號: 2095-2457(2018)01-0004-003
【Abstract】This design is based on intelligent toy excavator model for the control of the object, through the STC12C5A60S2 microcontroller to control the entire system, HC-SR04 ultrasonic sensor as a detection module, through the steering gear control bucket, issued by the microcontroller instruction, the car to complete automatic travel, automatic Detection of objects, automatic mining function.
【Key words】SCM; Excavator; Intelligence
隨著科技的迅猛進步,智能化電子產品已融入到生活的各個方面。在智能玩具領域,電子技術的發展使得玩具也越來越智能化,并成為一種新型的電子終端,也是世界玩具業發展的一個方向。由于智能玩具對兒童成長的重要性,加上智能玩具的技術是在對現有終端上技術的基礎上進行創新,相對來說成本較低,因此,集計算機控制和電子技術于一體的智能玩具的研究越來越受到各界的廣泛關注。
智能玩具中,智能小車類更加受到兒童的青睞。尤其是,隨著傳感技術、計算機科學、人工智能等相關學科的迅速發展,智能小車控制系統體現了以上學科的先進成果,成為具有實時決策與規劃功能,環境的感知功能,行為的控制和執行等功能的綜合體,是一種典型的機電一體化產品。
目前,常見的智能玩具小車除了利用遙控裝置能實現前進、后退、左轉、右轉、停車等功能外,往往還通過光學傳感器,語音識別裝置等進行控制。本論文設計了一種基于單片機和超聲波傳感器的玩具挖掘機,通過軟件編程來控制小車實現自動行駛、自動檢測物體、自動挖掘等功能。
1 硬件電路設計
本論文設計的智能挖掘機由單片機最小系統板、超聲波傳感器、電機驅動模塊、直流電機、舵機、電源開關構成。小車內部有4個電機,分別對應了小車的四個輪子;4個舵機,分別對應了機械臂的底盤、大臂、小臂和夾臂。設計通過軟件編程,讓小車獨立完成自動行駛、自動檢測物體、自動挖掘的過程。硬件部分的原理框圖如圖1。
1.1 單片機
本設計采用的主要控制芯片,在既考慮使用成本又考慮控制性能的基礎上,采用宏晶科技生產的STC12C5A60S2單片機。這是一種單時鐘/機器周期(1T)的新一代8051單片機,具有超強抗干擾、高速、低功耗等優點。不僅能夠完全兼容傳統的8051單片機的指令代碼,而且速度上也能提高8-12倍。它的內部集成有MAX810專用復位電路,4路PWM,8路高速10位A/D轉換,經常應用于電機控制及強干擾場合。
1.2 超聲波模塊
超聲波波長短、頻率高、繞射現象小,對固體、液體的穿透力很強,特別是具備能夠定向傳播、方向性好等特點。利用超聲波的特性設計而成的傳感器就是超聲波傳感器。它可提供一種非接觸檢測方案,檢測范圍既長又寬,被廣泛應用于苛刻和復雜的工業環境中。本設計用到的超聲波模塊型號是HC-SR04,如圖2所示。
其工作原理為:
(1)采用IO觸發測距,給至少10us的高電平信號;
(2)可以自動地發送8個40khz的方波,自動檢測是否有信號返回;
(3)若有信號返回,則通過IO輸出一高電平,高電平持續的時間是超聲波從發射到返回的時間。測試距離=(高電平時間*聲速(340米//秒)/2
如圖3所示為超聲波模塊外部電路圖。其中T是發射端,E是接收端。
1.3 直流電動機和舵機
直流電動機具有速度調節特性好,調速方便、平滑、范圍廣,過載能力較強,能夠實現制動、頻繁快速以及逆向旋轉的特點,適合作為本設計中玩具挖掘機的行駛動力。舵機具有體積小、響應速度較快、力矩大、外部機械設計簡單且穩定性較高的特點,常作為智能車中轉向的控制機構,適合控制本設計中挖掘機的機械臂工作狀態。
本設計采用直流電動機用舵機控制挖掘機。采用的是有刷直流電動機和塑料材質的數字信號標準車模舵機9g。
為控制智能挖掘機行駛,采用4個直流電機分別控制小車的四個輪子,驅動玩具挖掘機前進、后退和轉向,采用4個舵機,分別對應了機械臂的底盤、大臂、小臂和夾臂,控制挖掘角度和方向。
如圖4所示為直流電動機和舵機的外部電路圖。
1.4 驅動電路
驅動電路是主電路和控制電路之間的接口。在本設計中,單片機傳過來的信號無法直接用于控制電機工作,因此,采用由SGS公司生產的直流電機驅動集成電路L298N,如圖1.3所示。L298N為Multiwatt封裝的15腳外觀,內部有4通道邏輯驅動電路,能驅動兩個直流電機或者一個兩相步進電機。工作電壓是46V,輸出電壓最高能達到50V,可以直接通過調節電源來控制輸出電壓;輸出電流是2.5A,最大能達到4A,可以驅動電感性負載;也可以直接通過單片機的IO口提供信號;采用光電隔離,抗干擾能力強,而且電路相對較簡單,使用非常方便。
如圖5所示為L298N驅動電路板實物圖。
本設計中四個輪子均安裝了直流電機,因此分別將左前輪和左后輪、右前輪和右后輪并聯在一起,用1塊驅動電路板來驅動。
驅動外部電路圖如圖6所示。
2 軟件部分設計
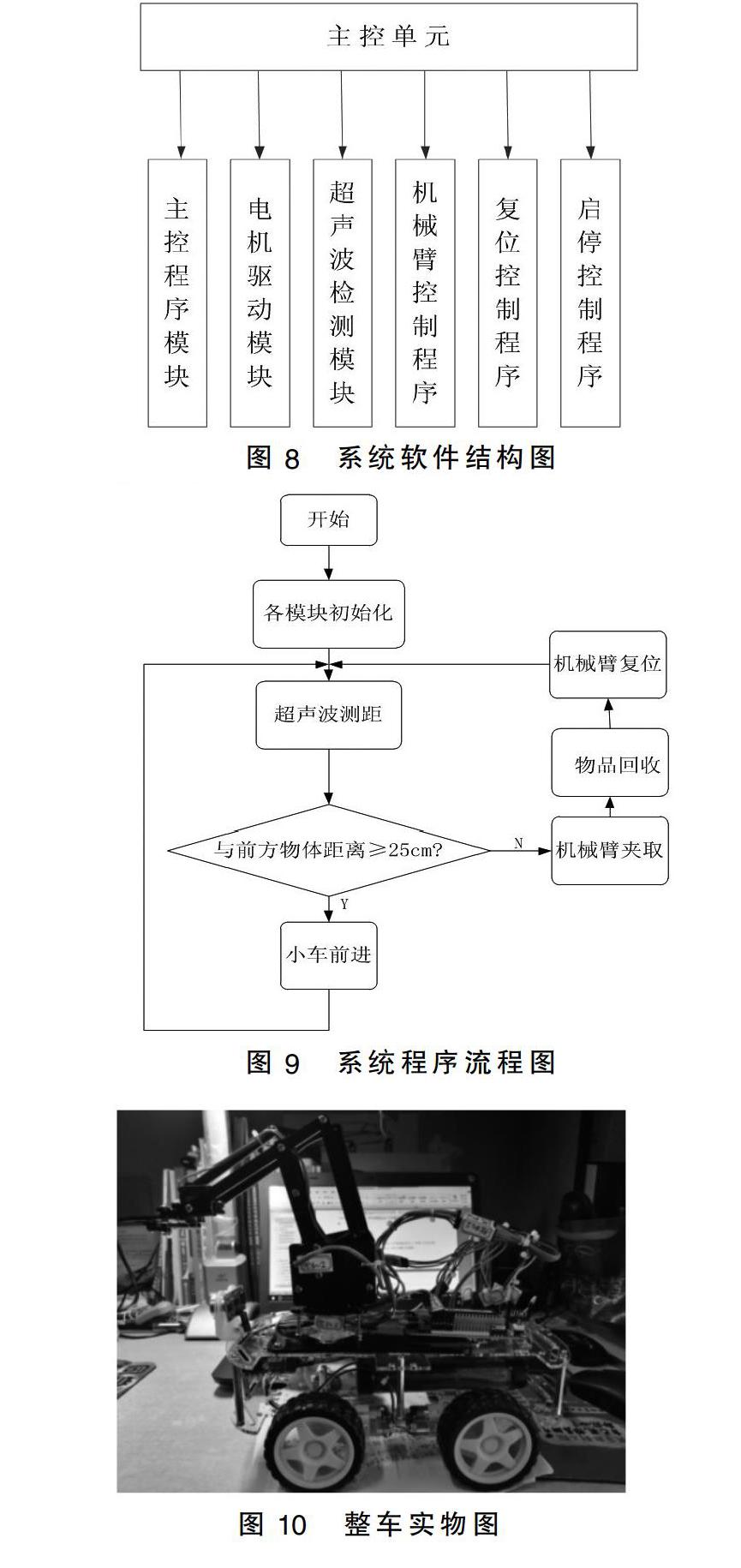
軟件結構設計采用了模塊化結構設計,由主程序模塊、超聲波檢測模塊﹑機械臂控制模塊﹑電機驅動程序模塊等構成。如圖8所示為系統軟件結構圖。
2.1 軟件設計思路
首先主程序調用超聲波測距子程序,超聲波測距程序再調用微秒延時子程序,根據超聲波檢測到的結果,若檢測距離在25cm之外,則調用小車前進子程序,同時超聲波程序繼續執行,繼續調用微秒延時子程序;若檢測距離在25cm以內,則調用小車停止子程序,不調用超聲波測距子程序,調用機械臂夾取子程序,同時該程序調用毫秒延時子程序,該子程序執行完,調用小車前進子程序和超聲波測距子程序,超聲波測距程序調用微秒延時子程序,檢測距離,根據檢測結果來調用相應的子程序,如此循環往復。
圖8 系統軟件結構圖
此程序中共有6個子程序,2個延時子程序,分別是微秒延時和毫秒延時,作用于超聲波和舵機之間的動作;1個超聲波測距子程序,作用與超聲波超聲波模塊和前方物體;1個小車前進子程序,小車停止子程序,作用于小車;1個機械臂夾取子程序,作用于機械臂。
2.2 軟件實現的效果
啟動電源,超聲波開始工作,有兩種情況:(1)在25厘米的范圍內檢測不到物體,單片機給小車一個前進指令,小車向前行駛;小車在向前行駛的過程當中,超聲波一直在檢測,直到檢測到前方有物體,這時單片機給機械臂一個夾取指令,機械臂開始夾取前方物體,夾取完畢后,單片機繼續給下車一個前進指令,超聲波繼續檢測,這樣一直下去。(2)在25厘米的范圍內檢測到物體,單片機給小車一個停止指令,給機械臂一個夾取指令,機械臂開始夾取前方檢測到的物體,夾取完畢后,單片機給小車一個前進指令,給超聲波一個檢測指令,這樣周而復始。如圖2.2所示為系統程序流程圖。
3 整車調試
如圖10所示為整車實物圖。
3.1 調試過程中出現的問題
(1)舵機抖動,在調試機械臂進行一整套夾取動作的過程中,舵機出現嚴重的抖動情況,分解機械臂夾取動作,進行單個動作的時候又沒有舵機抖動的情況出現;
(2)超聲波檢測物體不準確,存在檢測距離有差別,有誤差存在;
(3)機械臂無法動作或動作不連貫;
3.2 問題分析及解決方法
(1)問題分析:對于舵機抖動情況,由于單個動作分解出來又沒有抖動的情況,一開始以為是電源問題,更換多種電源后還是有抖動。經資料查閱后和測量后發現,四個舵機同時連貫動作會拉低電壓,瞬間釋放,導致單片機復位,一直這樣,從而導致舵機抖動。
解決方法:在某一時刻,只有一個舵機動作,也就是只有一路pwm信號輸出,相對來說舵機工作的穩定的多了,不會出現抖動的情況,很好的解決了舵機抖動的情況。
(2)問題分析:對于超聲波檢測物體有誤差存在,這是硬件本身的缺陷所導致的,由于設計中采用的超聲波模塊價格低廉,所以性能不穩定,有誤差存在。
解決方法:若出現此種情況,及時按下復位鍵,就能很好的避免超聲波檢測失誤。
(3)問題分析:對于一開始機械臂無法動作或動作不連貫,是由于機械臂活動關節的螺絲上的太緊了。
解決方法:將機械臂活動關節的螺絲調松一點,就能很好的解決問題。
4 結論
本文設計了一種可實現自動行駛、自動避障、自動挖掘的玩具挖掘機,通過整車調試,發現實物能較好實現預期功能,硬件簡單、成本較低,并且具有一定的智能性和趣味性。當然,設計中還存在一些不足,如還可以增加人車互動方面的功能,在控制精度方面進一步提高等。
【參考文獻】
[1]謝科.基于環境識別平臺的挖掘機智能作業試驗系統研制[D].浙江大學,2016.
[2]劉禹廷.負載口獨立挖掘機的智能控制系統研究[D].浙江大學,2016.
[3]陳乾林,陳海虹,周潛.挖掘機操作室溫度智能控制系統研究設計[J].機電技術,2013,(04): 73-75.
[4]趙鑫.智能挖掘機軌跡控制研究[D].中南大學,2012.
[5]賀繼林,趙鑫,張大慶,宋軍. 新型智能挖掘機自動軌跡控制研究[J].廣西大學學報(自然科學版),2012(02):259-265.
猜你喜歡
電子制作(2019年13期)2020-01-14 03:15:28
電子制作(2019年15期)2019-08-27 01:12:10
表面工程與再制造(2019年6期)2019-08-24 06:40:04
電子制作(2019年9期)2019-05-30 09:42:02
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
商周刊(2018年18期)2018-09-21 09:14:46
電子制作(2018年12期)2018-08-01 00:48:04
