水下無線傳感網中基于能量效率的簇路由
2018-03-19 05:54:42馮光輝廖金菊
計算機工程與設計 2018年3期
馮光輝,廖金菊
(鄭州工業應用技術學院 信息工程學院,河南 鄭州 451150)
0 引 言
考慮水域特性,相比無線射頻,聲通信更適合于無線傳感網絡(underwater wireless sensor networks,UWSNs)[1]。這主要是因為無線射頻功率容易被水吸收,衰減快。相對而言,聲通信在水下環境衰減較慢。然而,UWSNs中的聲通信仍遭受不少的挑戰。通常,聲通信受帶寬約束,同時聲通信的傳輸時延大于無線射頻通信[2]。此外,在UWSNs中節點能量是有限的,在部署UWSNs的同時,除了考慮通信模式,還需考慮節點能量。
部署UWSNs的目的在于收集水下環境的數據,即數據采集。為此,路由協議成為UWSNs的關鍵,也成為UWSNs研究焦點。由于UWSNs的惡劣環境,如噪聲、污染、節點能量受限等,這給UWSNs的路由協議提出了挑戰。為了最大化UWSNs的工作時間,即延長UWSNs網絡壽命,有效利用節點能量成為路由協議必須考慮的因素。
通常,傳輸一個數據包比接收一個數據包需消耗更多的能量。UWSNs中節點可直接或間接多跳向信宿傳輸數據包。傳輸距離越遠,消耗的能量越多。基于網絡總能量一定的事實,減少傳輸距離,并且均衡化節點負擔,成為延長網絡壽命的有效途徑。據此,在設計路由協議時,可從減少傳輸距離和平衡節點負擔著手,進而節省節點能量。
為此,本文提出基于能量效率的簇路由EECR。EECR協議采用無線傳感網絡中的簇路由的思想,將水下傳感節點劃分不同的簇。結合剩余能量以及距離信息,建立選舉簇頭的閾值函數,提高簇結構的穩定性。同時,采用輪換制度,平衡節點間的負擔。實驗結果表明,提出的EECR協議能夠有效地節省網絡能量,并提高了數據傳輸效率。
1 相關工作
目前,研究人員針對UWSNs提出不同路由策略。如LI等[3]提出基于深度(depth-based routing,DBR)路由。而Boyu等[2]提出DBR的改進協議EE-DBR。EE-DBR協議利用ToA測距技術估計節點深度,選擇最優的傳輸路徑,進而減少數據傳輸路徑,縮短端到端的傳輸時延。
此外,研究人員還提出了不同的選播路由協議[4-9]。其中文獻[5]提出VARP路由。VAPR路由利用序列號、跳數以及深度信息,選擇下一跳的方向,并采用有方向機會轉發避免路由空洞問題。而 Yougtae等[9]提出基于地理位置和機會的混合組播路由,該路由融合了地理位置和機會路由這兩類路由的優勢。
從上述分析可知,目前多數路由是通過調節節點深度,轉發數據包。而并沒有平衡節點能量消耗的角度出發。采用簇結構是平衡節點能量消耗的最佳方式,通過輪流機制,建立簇結構,簇內節點只需將數據至簇頭,由簇頭將數據傳輸至信宿,這減少了節點傳輸距離。
作為簇路由的代表,低能量自適應簇協議(low energy adaptive clustering hierarchy,LEACH)[10]是隨機方式選擇簇頭。具體而言,在每一輪中,節點i先產生隨機數χ,再與門限值T(i)比較,若大于門限值,就成為簇頭,其中門限值T(i)定義如式(1)所示
(1)
其中,r表示當前執行的輪數。而p為簇頭比例。G表示目前還未承擔過的簇頭的節點數。
為此,本文結合LEACH協議,提出基于能量效率的簇路由EECR。EECR協議考慮了節點能量以及距離信息,對LEACH的閾值進行修正,并形成不同的簇,減少傳輸距離和平衡節點能量消耗。
2 問題描述及系統模型
2.1 問題描述
在水下無線傳感網絡UWSNs中,有效利用節點能量、可靠地傳輸數據包成為研究熱點。現存的多數路由協議是依據節點的深度選擇下一跳轉發節點,如DBR協議。深度更淺的節點以及離信宿更近的節點承擔了更多數據轉發任務,這就使得這些節點的能量過早耗盡,影響了網絡壽命。
隨后,研究人員提出簇路由。然而,這些路由協議的簇頭CH選擇并非是最優的方式,并且簇結構并不穩定。為此,本文提出簇路由EECR協議。
對照組的自然分娩率為75.5%,剖宮產率為24.5%;試驗組的自然分娩率為87.3%,剖宮產率為12.7%。試驗組的自然生產率明顯高于對照組,而剖宮產率則相反。在兩組孕婦的分娩結局中(表一),對照組出現難產、產后出血、早產、新生兒窒息等現象等總發生率(41.7%)明顯高于試驗組(5.0%)。最后,在兩組孕婦的護理滿意度比較中(表二),試驗組的總滿意度(96.7%)高于對照組(83.7%),差異具有統計學意義(P﹤0.05)。
2.2 系統模型
考慮如圖1所示UWSNs模型,N為節點集,其中傳感節點集表示為Nn、聲納浮標集表示為Ns,即N=Nn∪Ns。rc為節點的通信半徑。
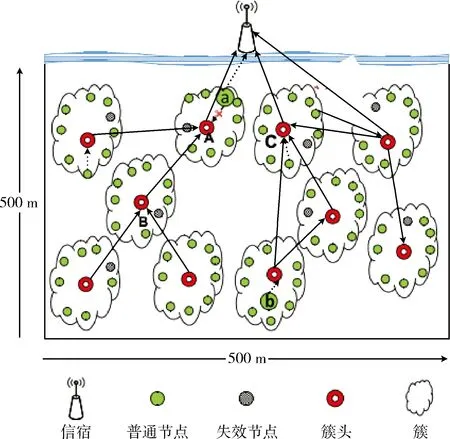
圖1 系統模型
Nn={n1,n2,…,n|Nn|} 個傳感節點隨機分布于I∈3區域。信宿節點既有無線射頻,又有聲通信能力[11,12],而節點只有聲通信能力。這些節點具有低帶寬聲學通信能力。
先依據節點深度構建不同簇,每個簇內有一個簇頭,并由簇頭收集簇內其它節點發感測的數據。因此,簇頭選擇算法成為簇路由的關鍵,為此本文提出基于能量效率的簇路由協議EECR。以LEACH協議為基礎,對其閾值進行修正,建立穩定簇結構,提高了路由了穩定性。
此外,EECR協議考慮了3類節點:簇頭、非簇頭(普通節點)以及失效節點,其中,失效節點是指節點能量消耗殆盡的節點。
3 EECR
EECR路由協議主要分為簇頭選擇、簇形成以及數據傳輸3個階段。
3.1 簇頭選擇過程
將時間劃分等間隔的輪r,每輪執行一次簇頭選擇算法。在每一輪內,節點隨機產生一個隨機數λ。若隨機數大于閾值,節點就成為普通節點,否則就成為候選簇頭Can_ch。
從上面的分析過程,閾值直接影響節點能否成為候選簇頭。為此,對閾值定義進行改進。據此,節點ni的閾值如式(2)所示
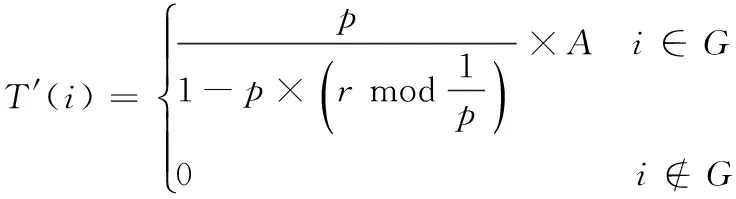
(2)
其中
(3)
而p表示網絡簇頭占總節點數的比例,r表示輪數。G為一個節點集,表示上一輪未被選擇為簇頭的節點集。即上一輪已成為簇頭的節點,在本輪不再參與簇頭的競爭。
從式(1)和式(2)可知,能量消耗速率、距離對簇頭的選擇重要的影響。為了進一步減少剩余能量過少的節點成為簇頭,因此,若候選簇頭的能量低于初始能量20%,就成為普通節點,反之就成為簇頭。簇頭選擇算法的偽代碼如圖2所示。
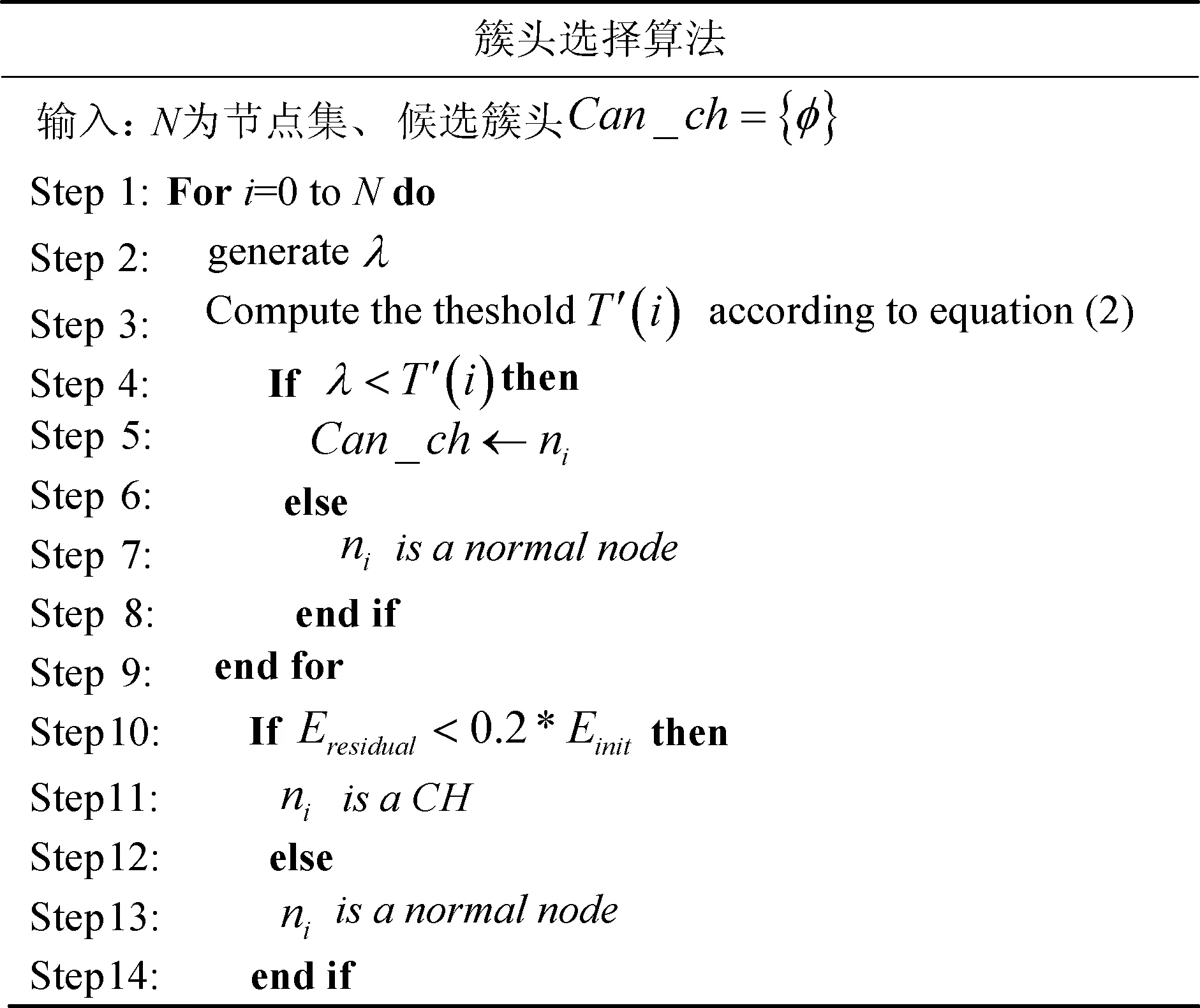
圖2 簇頭選擇算法偽代碼
3.2 簇形成過程
一旦成為簇頭后,就發送通告消息Inform_CH,其包含了自己位置。接收了Inform_CH后,普通節點就選擇離自己最近的簇頭,并向其發送加入簇消息Join_CH。簇頭接收后,就將該普通節點加入本簇,并向它回復確認消息,ACK_CH,成為本簇的成員節點,簇形成過程如圖3所示。普通節點ni收到簇頭CH1、CH2所發送的Inform_CH后,選擇離最近的簇頭加入,即簇頭CH2。節點ni立即向CH2回復Join_CH消息。最后,簇頭CH2向節點ni回復確認ACK_CH消息。

圖3 簇形成過程
3.3 消息傳遞過程
每個簇頭成員節點向自己的簇頭傳輸數據,簇頭收集數據后,便向信宿傳輸。如果信宿在簇頭的傳輸范圍內,簇頭便直接向信宿傳輸。否則,需要選擇離信宿更近的簇頭作為下一跳轉發節點,數據傳輸示例如圖4所示。
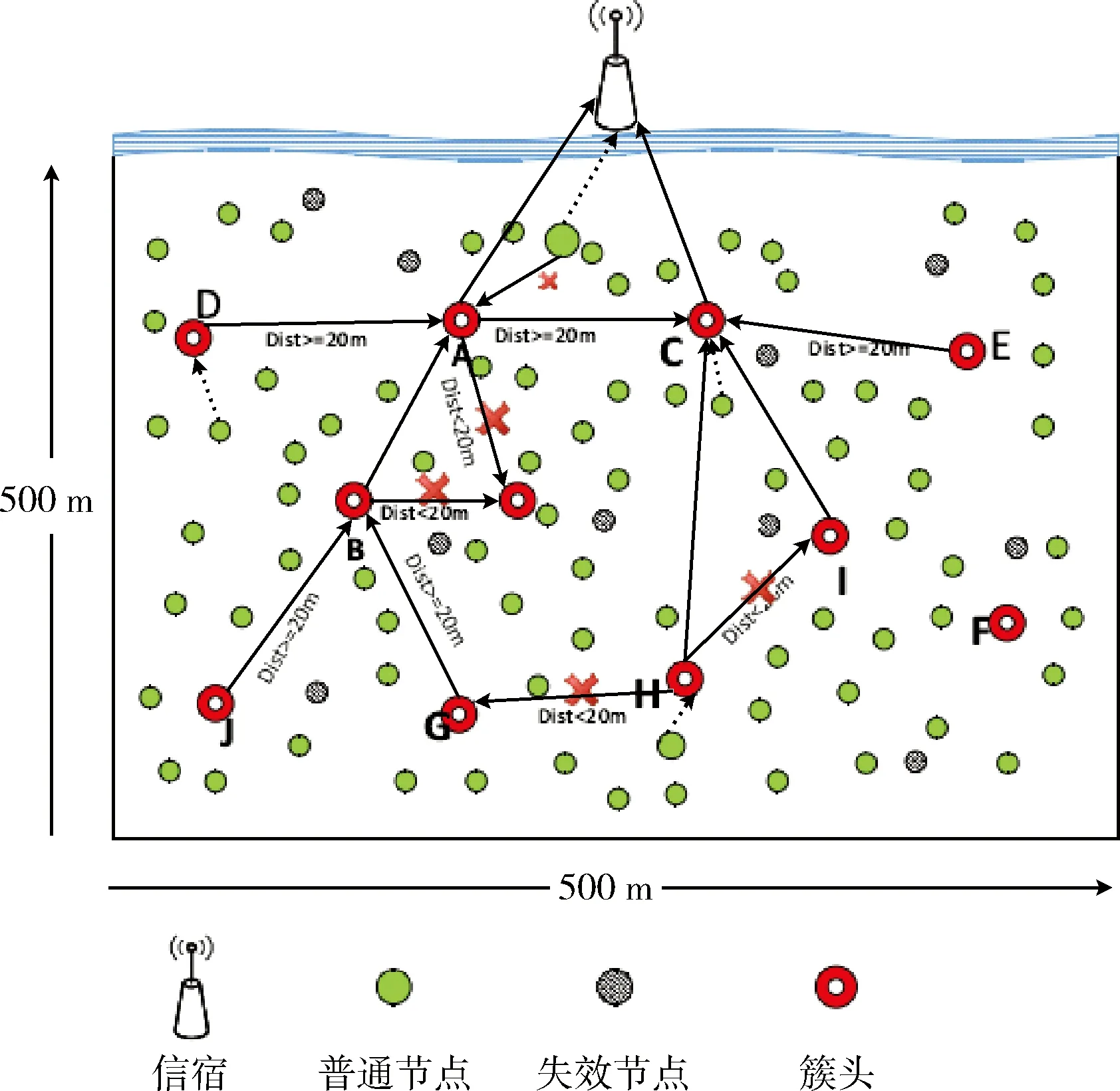
圖4 數據傳輸
4 性能分析
利用NS3建立仿真平臺[15,16]。考慮500m×500m區域。仿真參數如下:|Ns|=1、 |Nn|=200、r=100m。 仿真時間為300 s。每個實驗獨立重復100次,取均值作為最終仿真數據。
同時,選擇經典的DBR、EEDBR協議進行同步仿真,并與EECR協議進行性能比較。此外,選擇失效節點數、傳遞數據包數和剩余能量作為性能指標。仿真數據如圖5~圖7所示。

圖5 傳遞數據包數

圖6 失效節點數
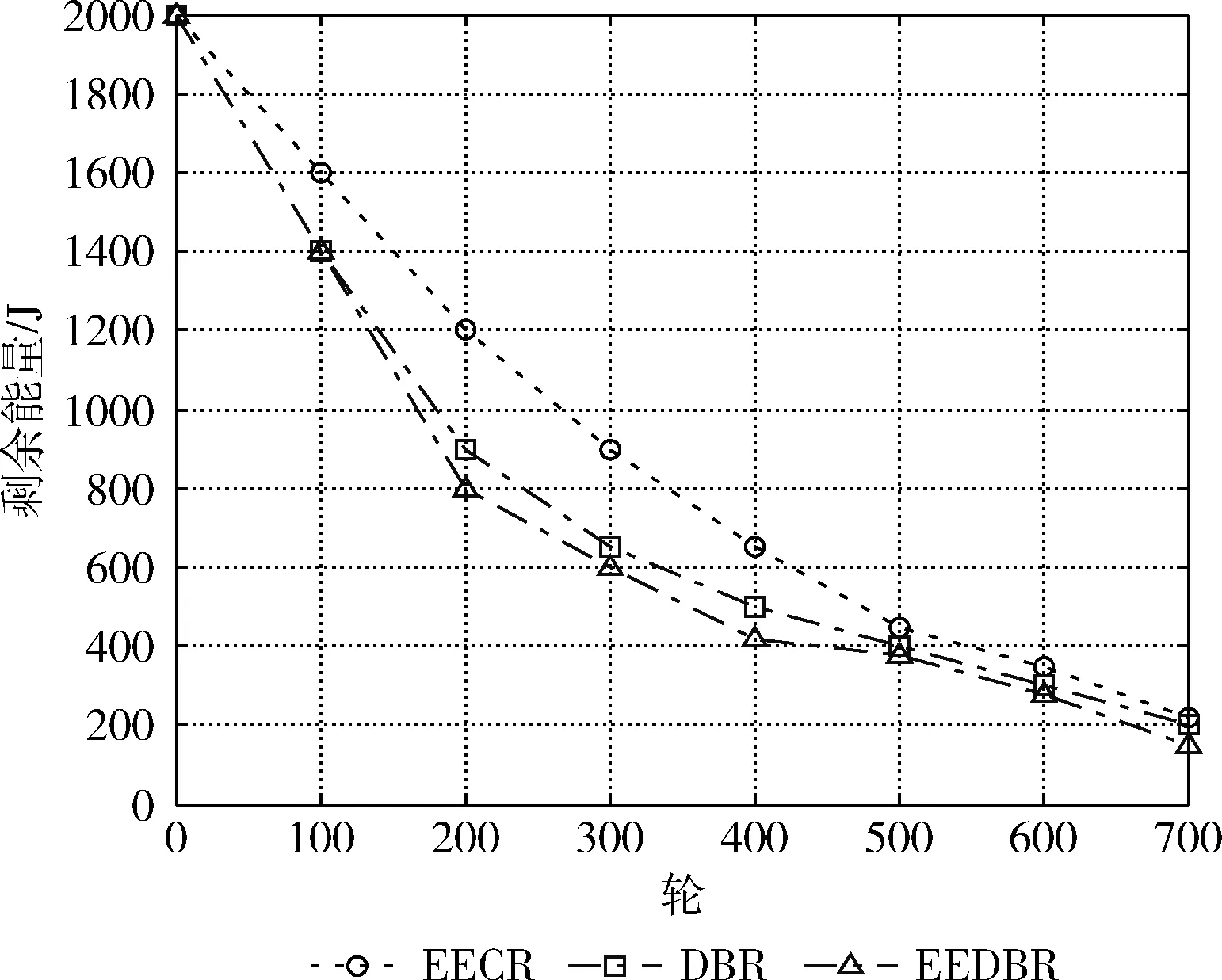
圖7 剩余能量
4.1 傳遞數據包數
3個協議的傳遞數據包數變化曲線如圖5所示。從圖5可知,EECR協議中信宿所接收數據包數最。在最初,EECR協議在接收數據包數方面的優勢并不明顯,在仿真時間結束后,EECR協議所接收的數據包數遠多于DBR和EEDBR協議。這主要是因為:EECR協議采用簇協議傳輸數據包,路由可靠性遠高于DBR和EEDBR協議。與EEDBR協議相比,DBR協議中信宿所接收的數據包數有所增加。原因在于:EEDBR協議在轉發數據包時,考慮到節點的剩余能量,減少了失效節點數,進而能夠有效地傳輸數據包。
4.2 失效節點數
圖6顯示了3個協議的失效節點數,這個指標反映了協議存儲網絡能量的性能,失效節點數越小,網絡能量利用率越高。從圖6可知,EECR協議的失效節點數最少,遠低于DBR和EEDBR協議。例如,在400輪時,EECR協議的失效節點數約為60個,而DBR協議、EEDBR協議的失效節點數分別為75、120個。這主要是因為:EECR協議在每輪都設有不同的閾值,平衡了節點間的能量消耗。
4.3 剩余能量
圖7顯示3個協議在不同輪數時所有節點的剩余能量和。剩余能量越多,協議平衡能量消耗水平越高,網絡壽命也越高。
從圖7可知,EECR協議的剩余能量優于CDBR和EEDBR協議,比DBR和EEDBR協議的平均剩余能量分別提高了12%、23%。這些數據進一步說明,EECR協議提高簇結構的穩定性,也平衡了網絡能耗。
5 結束語
針對水下無線傳感網絡的數據傳輸問題,提出了基于能量效率的簇路由EECR。EECR協議是引用LEACH協議簇頭選擇機制,并對其選擇簇頭的閾值函數進行修訂。修訂后的閾值函數融合了節點離信宿距離以及節點本身的剩余能量,提高了簇結構的穩定性。同時,采用輪流產生簇頭的機制,使得每個節點具有成為簇頭的概率相同,進而平衡能量消耗。仿真結果表明,提出的EECR協議能夠有效在利用網絡能量,比DRB的能量利用率提高了12%。
[1]Akyildiz I F,Pompili D,Melodia T.Underwater acoustic sensor networks:Research challenges[J].Ad Hoc Network,2015,3(3):257-279.
[2]Diao B,Xu Y.Improving both energy and time efficiency of depth-based routing for underwater sensor networks[J].International Journal Distributed Sensor networks,2015,4(2):23-32.
[3]LI Chao,XU Yongjun,DIAO Boyu.DBR-MAC:A depth-based routing aware MAC protocol for data collection in underwater acoustic sensor networks[J].IEEE Sensors Journal,2016,16(10):3904-3913.
[4]Michel B,Stephane B,Gervera G.Location-free link state routing for underwater acoustic sensor networks[C]//IEEE 28th Canadian Conference on Electrical and Computer Enginee-ring,2015:1544-1549.
[5]Noh Y,Lee U,Wang P,et al.VAPR:Void-aware pressure routing for underwater sensor networks[J].IEEE Trans Mobile Comput,2013,15(1):895-908.
[6]Azrina A,Ahmet Y,Fitzpatrick P.A survey distributed topology control technologies for extending the lifetime of battery powered wireless sensor networks[J].IEEE Communications Surveys and Tutorials,2013,15(1):121-144.
[7]ZHOU Kai,MENG Limin,HUA Jingyu.Residual capacity algorithm of wireless sensor network using Grover routing stra-tegy[J].Chinese Journal of Sensors and Actuators,2015,28(2):249-253(in Chinese).[周凱,孟利民,華驚宇.基于Grover路由策略的無線傳感網絡剩余容量構造與研究[J].傳感技術學報,2015,28(2):249-253.]
[8]Xu J,Li K,Min G.Reliable and energy-efficient multipath communications in underwater sensor networks[J].IEEE Trans Parallel Distrib Syst,2012,23(7):1326-1335.
[9]Yougtae N,Uichin L,Saewoom L.HydroCast:Pressure routing for underwater sensor networks[J].IEEE Transactions on Vehicular Technology,2016,65(1):333-348.
[10]Heinzelman W,Chandrakasan A,Balakrishnan H.Energy-efficient routing protocols for wireless micro-sensor networks[C]//Pro 33rd Hawaii Int Conf,System Sciences,2012:34-41.
[11]Luo Y,Pu L,Peng Z,et al.Effective relay selection for underwater cooperative acoustic networks[C]//IEEE 10th International Conference on Mobile Ad-hoc and Sensor Systmes,2013:104-112.
[12]Ahmed S,Javaid N,Ahmed A.SPARCO:Stochastic Performance analysis with reliability and cooperation for underwater wireless sensor networks[J].Journal of Sensor,2015:1-38.
[13]Javaid N,Jafri MR,Ahmed S.Delay-sensitive routing schemes for underwater acoustic sensor networks[J].Sensors,2012,12(2):1827-1845.
[14]Chen H,Wu X,Liu G,et al.A novel multi-module separated linear UWSNs sensor node[J].IEEE Sensor Journal,2015,11(4):1-7.
[15]Hsu C,Liu H,Luis J.Delay-sensitive opportunistic routing for underwater sensor networks[J].IEEE Sensors Journal,2015,15(11):6584-6591.
[16]Zhang S,Li D,Chen J.A link-state based adaptive feedback routing for underwater acoustic sensor networks[J].IEEE Sensors Journal,2013,13(11):4402-4412.
