大傾角狀態下數字天頂儀定位的傾斜誤差分析
2018-03-20 01:43:00張西輝周召發劉先一朱文勇楊上
兵工學報 2018年2期
張西輝, 周召發, 劉先一, 朱文勇, 楊上
(火箭軍工程大學 兵器發射理論與技術國家重點學科實驗室, 陜西 西安 710025)
0 引言
數字天頂儀作為一種高精度的天文定位儀器、相較于國外而言,我國對數字天頂儀的研究起步較晚,不夠成熟[1-3]。天頂儀在大傾角狀態下(調平精度在100″以上)進行定位時克服了精確調平(調平精度在10″以內)時操作過程復雜,定位耗費時間長的缺點,但在大傾角狀態下的定位由于旋轉軸和垂直軸之間存在較大的夾角導致定位誤差較大。曾志雄等[4]、郭金運等[5]就數字天頂儀的軸系誤差對定位精度的影響及其修正方法進行了研究,宋來勇[6]對垂線偏差測量的相關算法理論進行過研究,周召發等[7]、劉先一等[8]、常俊琴等[9]對數字天頂儀的傾角儀及其狀態參數進行了相關研究,但是他們在進行誤差分析和傾角修正時都是基于數字天頂儀在精確調平狀態下進行的,而且沒有對傾角修正值的本身誤差進行進一步研究。
大傾角狀態下儀器旋轉軸與垂直軸的夾角較大,最大能達到400″,而精調平時兩軸夾角在10″以內。在大傾角狀態下定位時數字天頂儀的轉位誤差、傾角儀的兩軸比例系數和夾角誤差很小,可以忽略,主要誤差是因旋轉軸和垂直軸的不一致導致傾角儀讀數產生線性漂移和零點誤差[10-12]。為了進行高精度的傾角補償,從數字天頂儀傾角補償原理出發,建立旋轉軸計算模型,經過理論分析,推導計算出旋轉軸的傾斜分量,對傾斜誤差進行分析以精確求解出傾角補償值,最后通過實驗對誤差的消除方法進行驗證。
1 傾斜狀態介紹
數字天頂儀主要由光學望遠鏡、電荷耦合器(CCD)成像裝置、精密傾角傳感器(精密傾角儀)、旋轉平臺(轉臺)等部分組成。在利用數字天頂儀進行定位時,通過對CCD獲取的恒星影像進行處理,可以得到相應的CCD坐標。運用星表對所得恒星進行匹配,得出恒星的切平面坐標。利用像坐標、切平面坐標和天文坐標的不斷迭代計算,可以對測站點進行定位。但是上述方法是在數字天頂儀精確調平的基礎上進行的。如圖1所示,在傾斜狀態下無法達到CCD平面(儀器傾斜面)與測站傾斜面的完全平行,二者之間存在一定的傾斜,天頂儀旋轉軸方向并不是測站點的鉛垂線方向,因此會產生較大的定位誤差,為了保證傾斜狀態系的定位精度必須建立模型對旋轉軸的傾斜分量加以修正。
2 旋轉軸傾斜分量的計算
利用數字天頂儀在傾斜狀態下對測站點進行定位的過程中,由于旋轉軸與垂直軸存在較大的夾角會造成定位誤差較大。為減小傾斜誤差的影響,得到測站點垂直軸指向的天文坐標,需要對旋轉軸天文坐標進行傾角補償。其經度、緯度傾角補償值大小為
(1)
式中:nφ、nλ為數字天頂儀各對稱位置相應測站切平面坐標系的旋轉軸分量;φ為數字天頂儀旋轉軸向的天文緯度。因此由(1)式建立的旋轉軸傾斜改正模型可知,數字天頂儀旋轉軸傾斜改正計算的關鍵是精確求取旋轉軸分量nφ、nλ. 如圖2所示,雙軸傾角儀能夠高精度地測量數字天頂儀的傾斜角度。
圖2中,β為CCD圖像坐標系x軸與傾角儀敏感軸X軸之間的夾角,α為CCD圖像坐標系x軸的方位角(即x軸與正北方向的夾角)。根據不同坐標系的坐標轉換模型,數字天頂儀旋轉軸相應切平面坐標系(ξ,η)的傾斜分量nφ、nλ為
(2)
式中:α+β為傾角儀敏感軸X軸的方位角;m、n分別為對稱觀測位置傾角儀敏感軸X軸、敏感軸Y軸方向的傾斜量。根據傾角儀敏感軸X軸、敏感軸Y軸對稱觀測位置的讀數m1、m2和n1、n2,按(3)式計算
(3)
3 傾斜誤差分析
數字天頂儀在大傾角狀態下定位過程中,傾角儀的讀數會受傾斜量的影響。此處數字天頂儀采用的雙軸傾角儀為瑞士徠卡測量系統股份有限公司生產的Nivel 210雙軸傾角儀。根據其技術參數可知,Nivel 210雙軸傾角儀的測量范圍為±410″,分辨率為0.2″. 測量準確度與傾斜角測量區間有關,傾角測量區間越大、準確度越低,測量準確度最低可達±9.7″.
3.1 線性漂移
數字天頂儀在大傾角狀態下定位過程中,傾角儀的讀數會產生較大的漂移,漂移在短時間內是近似線性的。讀數線性漂移跟兩方面因素有關:一是跟時間有關,由于在測量時時間間隔較短,所以這部分的影響可以忽略;二是由于儀器位于大傾角狀態下,較大的傾斜量會影響儀器性能,所以不能忽略。
針對傾角儀敏感軸讀數線性漂移的誤差,數字天頂儀在定位測量時采用1-2-2-1兩個對稱位置上觀測的方法,可有效地消除傾角儀敏感軸讀數線性漂移的影響,如圖3所示。
設數字天頂儀在1-2對稱觀測位置時,傾角儀敏感軸X軸、敏感軸Y軸的讀數分別為m1、m2和n1、n2,在兩個敏感軸間讀數的比例系數為1,兩個敏感軸間的剪切角ε=90°的情況下,設1-2對稱觀測位置傾角儀敏感軸的讀數線性漂移為θX、θY,則在1-2對稱觀測位置的數字天頂儀旋轉軸傾斜量的計算模型為
(4)
由(3)式可得
(5)
所以根據(1)式、(2)式可得,在大傾角狀態下定位時數字天頂儀旋轉軸方向天文經度、緯度的修正模型為
(6)
式中:α1為數字天頂儀在1拍攝位置時的CCD圖像坐標系x軸的方位角。根據(6)式,令
(7)
則(6)式可以進一步表示為
(8)
數字天頂儀經過1-2位置拍攝后再進行2-1位置拍攝觀測。設2-1對稱觀測時傾角儀敏感軸X軸、敏感軸Y軸的讀數分別為m′2、m′1和n′2、n′1. 同理可得,對稱觀測位置傾角儀敏感軸X軸、敏感軸Y軸方向的傾斜量為
(9)
其傾斜軸經度、緯度傾角補償值大小為
(10)
根據(10)式,令
(11)
所以此時旋轉軸方向天文經度、緯度的修正模型(10)式可以表示為
(12)
因為2位置是1位置旋轉180°得到的,此時拍攝時CCD圖像坐標系x軸的方位角為α2,所以有
(13)
聯立(11)式、(13)式可得
(14)
化簡可得
(15)
所以在2位置旋轉軸方向天文經度、緯度的修正模型為
(16)
聯立(8)式和(16)式對傾斜改正求平均值可得
(17)
由(17)式可知,數字天頂儀定位測量時若能按照1-2-2-1的觀測順序觀測,并按照(6)式計算1-2觀測位置的旋轉軸傾斜改正,按照(10)式計算2-1觀測位置的旋轉軸傾斜改正,則雖然各位置的傾斜改正都含有傾角儀敏感軸讀數的線性漂移影響,通過取1-2觀測位置和2-1觀測位置的傾斜改正平均值就可消除其影響。
3.2 零點偏差
零點偏差是指傾角儀零位的偏移,使得傾角為0°時傾角儀的輸出數據不為0. 在精確調平狀態下零點偏差對定位精度的影響很小,可以忽略。但是在大傾角狀態下(雙軸傾角儀輸出數據在100″以上時),零點偏差對傾角補償值的影響較大,不能省略。
根據(4)式,通過旋轉兩個對稱位置求均值的方法可以消除零點偏差。在利用(17)式計算傾斜改正平均值時,不僅消除了讀數漂移也同時消除了零點偏差。
4 實驗數據分析
實驗過程中采用西安航光儀器廠研制的數字天頂儀,視場角大小為3°×3°,CCD采用日本Truesense Imaging公司的KAF-16803全畫幅圖像傳感器,分辨率為4 096×4 096,像素大小9 μm,有效面積36.8 mm×36.8 mm. 采用的雙軸傾角儀為瑞士俫卡測量系統股份有限公司的Nivel 210,測量范圍為±410″,分辨率為0.2″. 一般傾角值輸出數據低于50″時為小傾角,大于50″時為大傾角,為了能夠明顯地反映在傾斜狀態下的傾角值輸出數據,一般傾角值輸出數據取100″以上。數字天頂儀工作時先順時針拍攝8幅星圖,然后再逆時針拍攝8幅星圖,然后將對稱位置上的2幅星圖作為1個解算單元。已知測站點概略的天文經度為109.1°,天文緯度為34.3°,星表采用的是依巴谷星表,星等可觀測暗至14星等,以第1幅圖像為例可得出如表1所示的部分識別恒星數據。
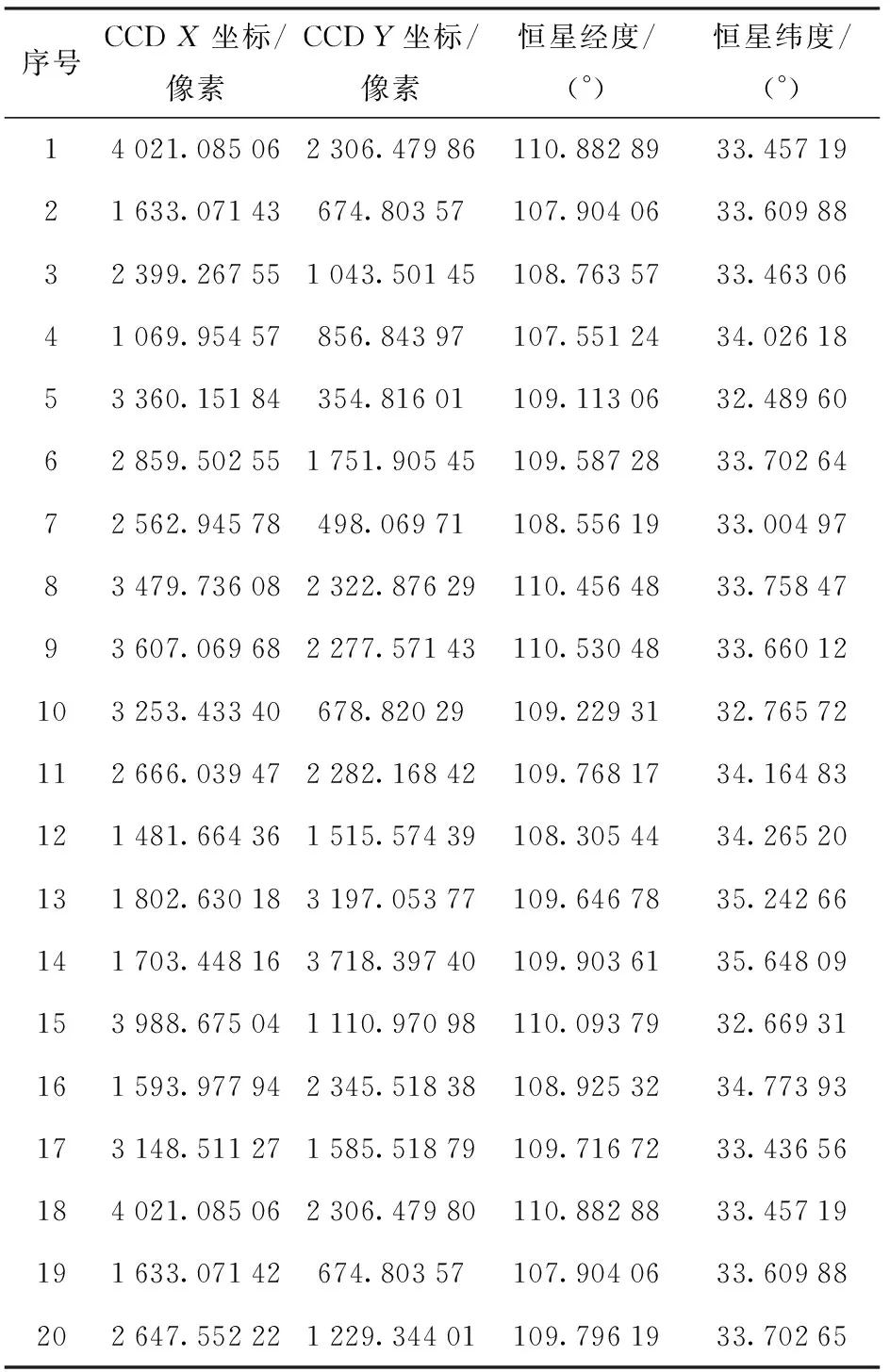
表1 部分識別恒星數據
對實驗數據進行測站點位置坐標的解算,分別對數據進行修正傾角補償值和未經過修正傾角補償值兩種情況下的定位精度比較,比較定位結果如表2所示。
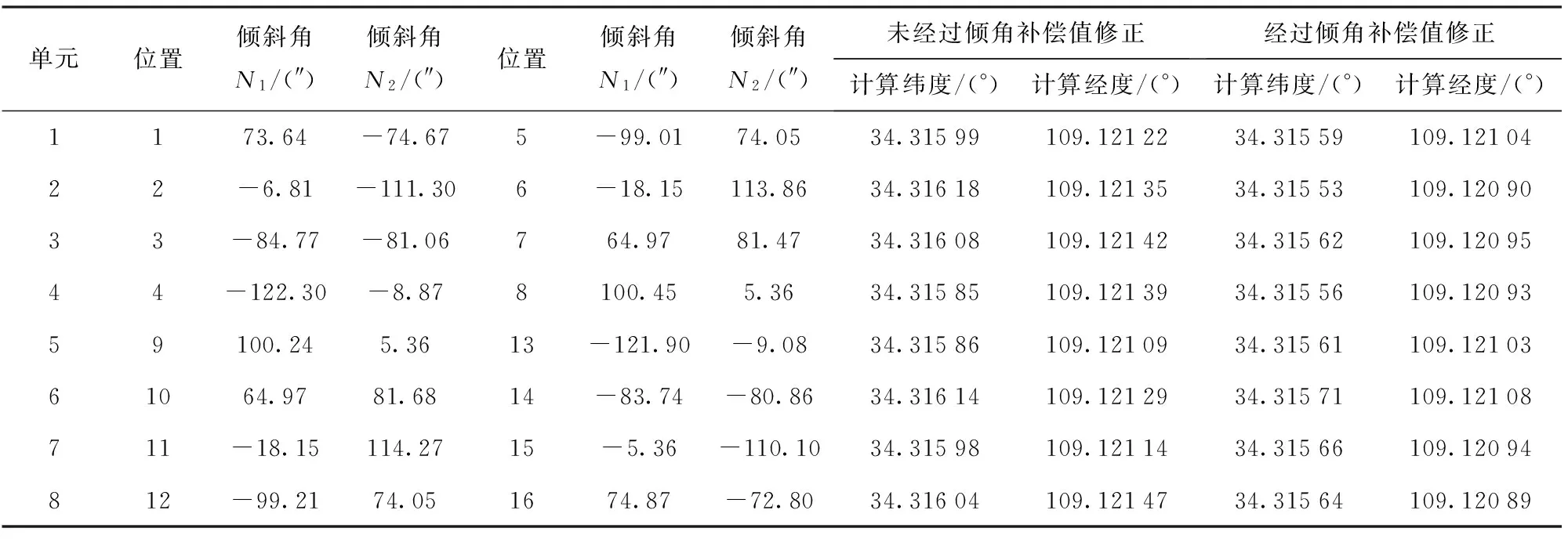
表2 定位結果
為了更明顯地表示出進行過傾角補償值修正和未經過傾角補償值修正兩種情況下的定位結果,畫出兩種情況下定位結果計算值的分布圖,如圖4所示。
從圖4可以看出,在對傾角補償值進行過修正之后,數字天頂儀的定位精度有了顯著提高,計算其標準差可得,在未進行過傾角修正時經度、緯度的定位精度分別為0.485 6″和0.428 6″,傾角修正值經過修正后的定位精度分別達到了0.266 5″和0.200 9″.
5 結論
大傾角狀態下的數字天頂儀定位,能夠克服操作過程復雜、定位耗費時間長的缺點,但是大傾角狀態會使設備旋轉軸和垂直軸存在較大的夾角,最終導致定位誤差較大。為提高軸系補償的準確性,進而提高在大傾角狀態下的定位精度,本文從提高傾角補償值的自身精度角度出發,通過對稱位置傾角儀的讀數解算傾角補償值,消除了傾角補償值中線性漂移和零點偏差的誤差。對傾斜誤差進行修正后,數字天頂儀的定位精度由以前的0.5″左右提高到0.3″以內。這里只分析了數字天頂儀定位過程中在大傾角狀態時的傾斜誤差,修正傾角儀讀數,提高傾角補償值的自身精度,在大傾角狀態下的定位精度還受星圖識別誤差、轉位誤差、傾角儀兩軸比例系數和夾角誤差等方面的影響,下一步應對這些定位誤差進行深入研究以提高定位精度。另外,目前數字天頂儀在定位時都是在靜基座狀態下進行的,即將儀器置于靜止狀態下進行定位工作的,后續研究應對動基座狀態下的數字天頂儀定位方法進行研究,實現載體在運動狀態下就能通過數字天頂儀進行可靠準確定位,這將對數字天頂儀的廣泛應用具有十分重大的意義。
)
[1] 田立麗,郭金運,韓延本,等.我國的數字化天頂望遠鏡樣機[J].科學通報,2014,59(12):1094-1099.
TIAN Li-li, GUO Jin-yun,HAN Yan-ben,et al. Digital zenith telescope prototype of China[J]. Chinese Science Bulletin,2014,59(12): 1094-1099. (in Chinese)
[2] Halicioglu K, Deniz R, ?zener H. Digital zenith camera system for astro-geodetic applications in Turkey[J]. Journal of Geodesy and Geoinformation, 2013, 1(2):115-120.
[3] 郭敏,張紅英.CCD數字攝影在天文定位測量中的運用探討[J].測繪技術裝備,2005, 7(1): 28-29.
GUO Min, ZHANG Hong-ying.The application of CCD in the astronomy orientation[J]. Measurement Technology Equipment, 2005,7(1): 28-29. (in Chinese)
[4] 曾志雄,胡曉東,高立民.天頂攝影儀軸系誤差對垂線偏差測量精度的影響及其修正方法[J].光學精密工程,2004,12(1):6-10.
ZENG Zhi-xiong, HU Xiao-dong, GAO Li-min. Effect of digital zenith camera axis error on measurement precision of vertical deflection and its correction [J]. Optics and Precision Engineering, 2004,12(1):6-10.(in Chinese)
[5] 郭金運,宋來勇,常曉濤.數字天頂攝影儀確定垂線偏差及其精度分析[J].武漢大學學報:信息科學版,2011,36(9):1085-1088.
GUO Jin-yun, SONG Lai-yong,CHANG Xiao-tao. Digital zenith camera determine the vertical deflection and its accuracy analysis[J]. Geomatics and Information Science of Wuhan University, 2011, 36(9): 1085-1088.(in Chinese)
[6] 宋來勇.基于CCD/GPS垂線偏差測量理論算法研究[D].青島:山東科技大學,2012.
SONG Lai-yong. Research on theory and algorithm for measuring of vertical deflections based on CCD and GPS[D]. Qingdao: Shandong University of Science and Technology, 2012. (in Chinese)
[7] 周召發,劉先一,張志利,等.基于數字天頂儀的雙軸傾角儀研究[J].光子學報,2015,44(8): 21-26.
ZHOU Zhao-fa, LIU Xian-yi, ZHANG Zhi-li, et al. Research on two-axis tilt sensor based on digital zenith camera[J]. Acta Photonica Sinica, 2015, 44(8): 21-26.(in Chinese)
[8] 劉先一,周召發,張志利,等.數字天頂儀中傾角儀參數的標定[J].光學精密工程,2016,24(9):2325-2331.
LIU Xian-yi, ZHOU Zhao-fa, ZHANG Zhi-li, et al. Calibration of inclinometer parameters in digital zenith camera[J]. Optics and Precision Engineering, 2016, 24(9):2325-2331.(in Chinese)
[9] 常俊琴.數字天頂攝影儀的傾斜儀狀態參數計算[J].石化技術,2017,24(4):118-119.
CHANG Jun-qin.Calculation of state parameters of clinometer in digital zenith camera [J]. Petrochemical Industry Technology,2017,24(4):118-119.(in Chinese)
[10] 文香穩,潘明華,朱國力.傾角儀特性研究及其測量誤差補償[J].傳感器與微系統,2011,30(3):84-86.
WEN Xiang-wen, PAN Ming-hua, ZHU Guo-li. Research on characteristic of the inclinator and compensation for its measurement error[J]. Transducer and Microsystem Technologies, 2011,30(3):84-86.(in Chinese)
[11] 于娜,劉志遠,趙佳龍.傾角傳感器的溫度補償研究[J].傳感器與微系統,2014,33(10):14-16.
YU Na, LIU Zhi-yuan, ZHAO Jia-long. Research of temperature compensation of inclination sensor[J]. Transducer and Microsystem Technologies, 2014,33(10):14-16.(in Chinese)
[12] 樊銳,史磊.數字傾角儀的非線性補償及抗干擾技術[J].儀表技術與傳感器,2013(5):36-38.
FAN Rui, SHI Lei. Nonlinear error compensation and anti-jamming technique of digital clinometer[J]. Instrument Technique and Sensor, 2013(5):36-38.(in Chinese)