有感FOC無刷直流電機驅動技術的三軸增穩云臺研究
2018-03-20 09:09:54廣東工業大學自動化學院黎澤宇
電子世界 2018年4期
關鍵詞:方向
廣東工業大學自動化學院 黎澤宇 張 祺
1.引言
三軸增穩云臺是一種為實現目標物體姿態穩定控制的裝置,應用增穩云臺可以使攝像者在運動的過程中也可以輕松地拍攝出平穩流暢的視頻畫面。增穩云臺亦可以應用于商業航拍、空中攝影、空中巡航監視、安防等對視頻畫面質量要求較高的領域中[1],以保持拍攝畫面的清晰與穩定。
文獻[2-6]中介紹了采用了舵機、步進電機等作為云臺的傳動機構的方法,這些傳統的執行機構大多采用開環結構,僅能在一定程度上實現云臺的姿態位置補償,消振能力極為有限,對變動負載的適應性不強,無法滿足高響應度和大扭矩輸出的能力[7],轉動噪音大,極大地影響了拍攝效果。采用高精度的非接觸式編碼器作為電機的位置反饋,結合磁場定向控制策略(FOC),無刷直流電機可實現高精度、高響應、大轉矩的輸出,轉矩脈動小,轉動平滑,噪音小,非常適合作為增穩云臺的傳動執行機構。
2.有感FOC無刷直流電機控制
2.1 磁場定向控制的電磁轉矩數學模型
磁場定向控制(FOC),有時也稱為矢量控制。在電機內部,定子電流產生旋轉的磁鐵矢量,并以相同的旋轉速度帶動轉子同步旋轉。從這個角度觀察電機,定子電流就像是一個常量一樣,并且旋轉磁通矢量是靜止的。最終,通過坐標變換,可以實現如同控制直流電機一樣控制定子電流來控制電機的轉速或轉矩。
Y型連接的無刷直流電機可采用與PMSM(永磁同步電機)相同的正弦波方式來驅動,由磁場定向控制理論,d-q坐標系下電磁轉矩表達式為[7]:

式中Te為電磁轉矩,Pn為電機極對數,ψf為轉子永磁體磁鏈,Ld為直軸同步電感,Lq為交軸同步電感,id、iq分別為電流在d-q坐標系中d軸分量和q軸分量。
增穩云臺常用的無刷直流電機永磁體安裝在電機表面,有較大的等效氣隙,這使得凸極影響可以忽略不計[8],因此直軸電樞電抗與交軸電樞電抗相等,即:

把(2)式代入(1)式得:

由(3)式可知,電磁轉矩Te與iq成正比,可以通過直接控制q軸電流分量iq來控制電機的電磁轉矩。
圖1為無刷直流電機定子電流矢量圖,d-q軸為以同步角速度ω旋轉的轉子旋轉坐標系,α-β軸為定子靜止坐標系,為定子電流空間矢量,d軸與α軸的夾角θ為轉子位置角,也稱為電角度,與d軸的夾角為轉矩角δ,與α軸的夾角為γ。
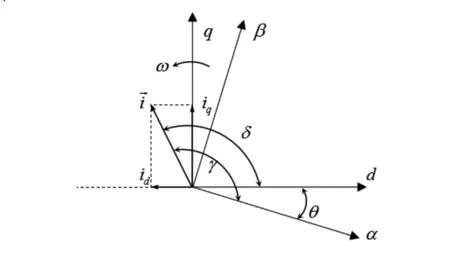
圖1 無刷直流電機定子電流矢量圖
由圖1幾何關系可得iq與的關系:


由(5)式可見,當通過控制iq的大小來控制電磁轉矩Te的大小的同時,還需控制id為0來確保單位定子電流產生的電磁轉矩最大化,此時,iq的大小直接等于的幅值,即可通過控制定子電流的大小來控制iq,進而控制電磁轉矩大小。
2.2 磁場定向控制算法流程
磁場定向控制的控制框圖如圖2所示,ia為A相瞬時電流,ib為B相瞬時電流,iq_Ref為q軸的期望電流值,id_Ref為d軸的期望電流值,ωRef為期望的電機轉速。由(3)式,iq和Te成正比關系,iq的值可以表示電磁轉矩的大小,因此,可以通過設置iq_Ref的值來設置電機電磁轉矩的輸出。由式(5),id_Ref應設置為0。
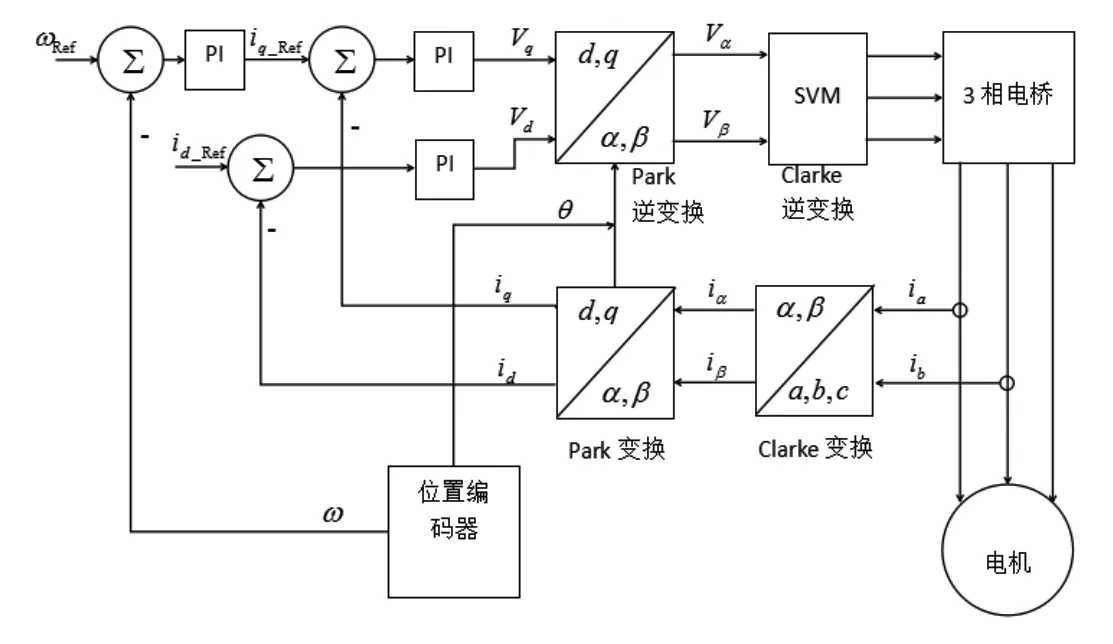
圖2 磁場定向控制框圖
具體的算法流程如下:
(1)設置iq_Ref的值來控制電機轉矩輸出,同時設置iq_Ref為0。
(2)測量三相定子的電流ia,ib,ic。由基爾霍夫定律有:

因此,實際上可通過只測量A相和B相定子電流ia和ib,C相定子電流可由(6)式計算得出。
(3)通過Clarke變換,把測量得到的3相定子電流轉換到2相靜止坐標系α-β坐標系中,由此可以得到iα、iβ。
(4)通過位置編碼器,檢測出轉子角度,從而得到電角度θ,如圖1所示,把d-q旋轉坐標系相對α-β靜止坐標系逆時針旋轉θ角度,再通過Park變換,計算得到id、iq。
(5)誤差信號由id、iq的實際值與各自信號的參考值id_Ref、iq_Ref比較得到。把誤差信號輸入PI控制器,得到需要施加在電機上的電壓矢量Vd和Vq。
(6)使用新的電角度,通過Park逆變換,把PI控制器輸出的電壓矢量Vd和Vq逆變到靜止參考坐標系α-β下,計算得到正交電壓值Vα和Vβ。
(7)Vα和Vβ通過Clarke逆變換得到需要施加在三相定子上的電壓值Va、Vb和Vc。
(8)3相電壓值Va、Vb和Vc可以用來計算新的PWM占空比值,通過SVM機制,更新各相PWM輸出,生成期望的電壓矢量,這個過程也稱為SVPWM[9],具體的實現機制在文獻[9]中已有詳細的方法。
(9)根據控制對象的當前狀態,更新參考值iq_Ref,然后回到(1)開始新一輪調節。
3.結合磁場定向控制技術的增穩云臺控制
3.1 增穩云臺自穩原理
圖3為增穩云臺工作時自穩的平面示意圖。由圖可知該增穩云臺由三個軸組成:控制豎直方向的Pitch軸、控制水平方向的Roll軸以及控制水平面移動方向的航向軸Yaw軸。
由圖3可知,當負載變動時,控制豎直方向的Pitch軸變化不大,受影響最大的為控制水平方向的Roll軸,Yaw軸基本沒有影響,因此,以Roll軸為代表來分析增穩云臺的自穩過程。作出Roll軸的受力示意圖,如圖4所示,L為Roll軸負載重心到Roll軸軸心的長度,φ為負載偏離水平方向的角度Fx,Fy分別為負載等效重心的重力在與L垂直方向上和與L平行方向上的分力。
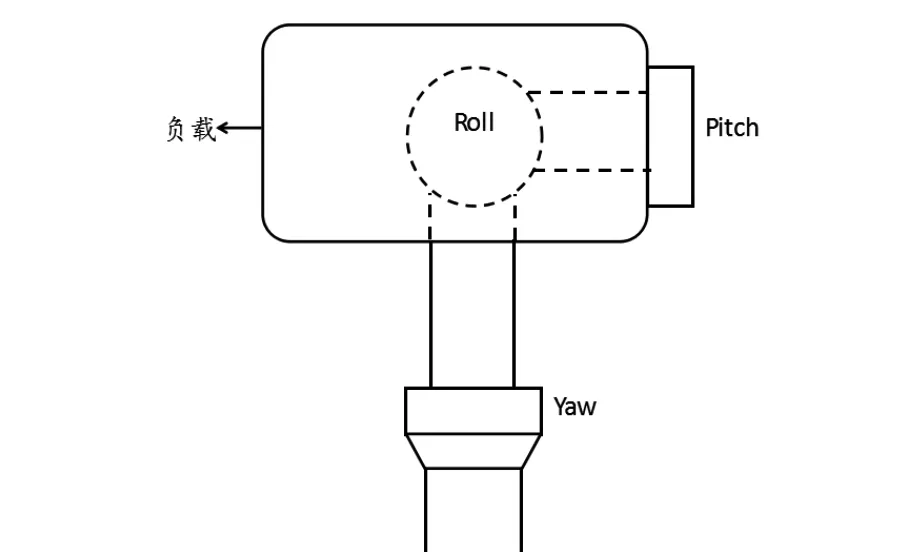
圖3 增穩云臺自穩平面示意圖
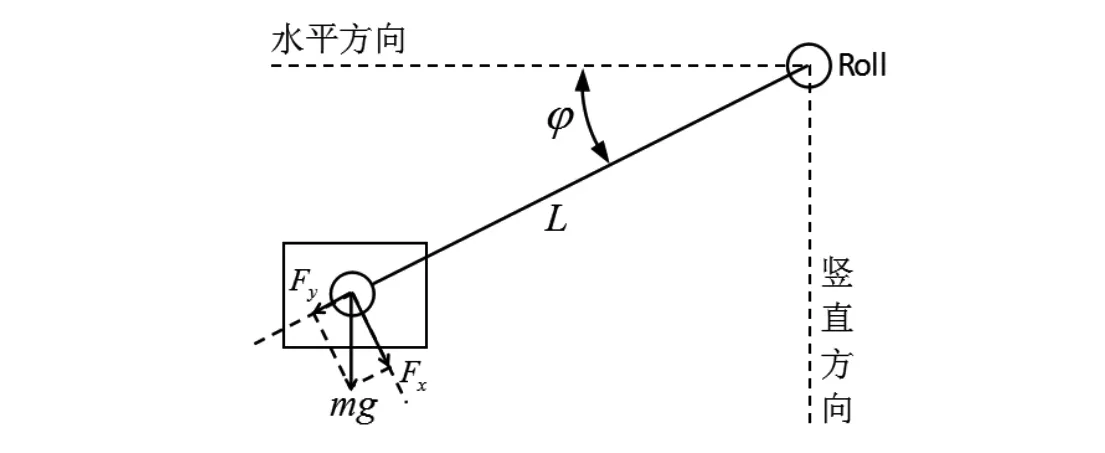
圖4 Roll軸受力示意圖
由圖4中的幾何關系,可以得到Fx和Fy在Roll軸上產生的力矩為:

為了保持平衡,Roll軸電機需要先產生一個可以抵消力矩Tx的轉矩Te,由力矩平衡原理可得:

將(7)式代入(8)式得:

其中負號僅代表方向。
由于各種外部擾動的存在,負載出現往復抖動[7],增穩云臺各軸電機為了保持負載姿態穩定,在輸出一定的轉矩抵消由負載重力產生的力矩的同時,還要時刻根據負載姿態,調整電機轉矩的輸出。以Roll軸為例,在φ不為0時,Roll軸電機會在Te的基礎上,疊加一個小的轉矩輸出ΔTe來使負載往水平的方向轉動,從而保持負載于水平位置,因此電機實際的轉矩輸出為:

當負載水平時,φ = 0,則有:

可見,只要Te的值沒有超過電機最大的可輸出轉矩時,均可保持負載在該軸上的姿態穩定。可根據(11)式判斷所選用的無刷直流電機是否滿足控制需求。
實際上,φ不可能絕對地為0,當φ小到可以忽略不計時,可以近似地把它認為0,即負載是處于水平狀態的,這是增穩云臺保持負載姿態穩定的基礎點之一。
3.2 結合磁場定向控制的增穩云臺控制算法
在這里,依然以Roll軸來分析,Roll軸保持負載水平的過程,實際上是保持φ的值在0的附近浮動。當φ值偏離0時,通過使電機往φ偏離0的反方向旋轉,把負載帶回水平位置,當調節的頻率很高,φ偏離0的值很小時,負載便像沒動過一樣靜止在水平方向。控制算法框圖如圖5所示。
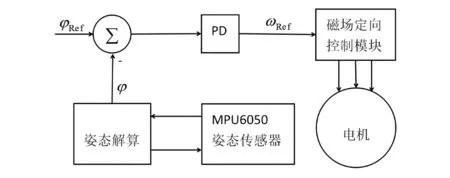
圖5 增穩云臺Roll軸自穩控制框圖
具體的控制算法思路如下:
(1)根據控制需求設置參考位置φRef,對于Roll軸而言,設置為水平位置,即φRef= 0。
(2)讀取姿態傳感器的原生數據。通常增穩云臺的姿態傳感器使用MPU6050,可以通過IIC通信協議來讀取該傳感器的各軸向數據。
(3)通過姿態解算算法估算出負載的姿態角φ。由于姿態傳感器MPU6050返回的數據受到抖動干擾,不能直接使用,因此需要進行姿態解算[10]來估算出準確的位置角度。文獻[11]中介紹了一種精確快速的姿態解算算法。
(4)通過比較姿態角φ與參考位置φRef,得到誤差信號。把誤差信號輸入PD控制器,計算得到無刷直流電機的轉速參考值ωRef。
(5)把ωRef與無刷直流電機的實際轉速ω作比較,得到誤差信號,輸入到PI控制器,得到的輸出值作為新的iq_Ref輸入到磁場定向控制模塊中,從而驅動電機旋轉。
(6)結束本次調節,返回(1)進行新一輪的調節。
4.實驗結果
本文研究的三軸增穩云臺系統的各種負載狀態實物如圖6所示。
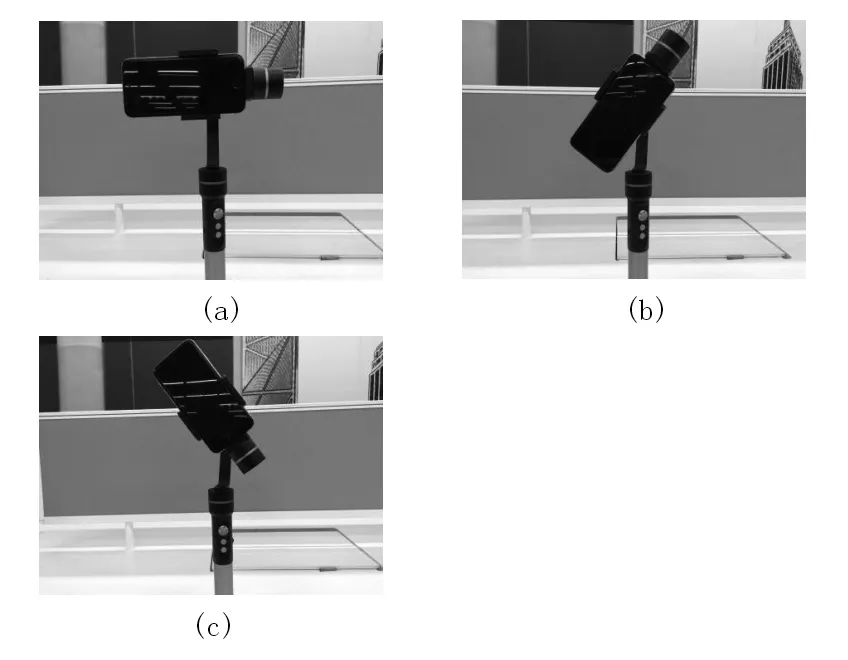
圖6 三軸增穩云臺系統負載狀態圖
實驗樣機的參數為:工作電壓3.7V,最大載重220g,電機的極對數為7,在3.7V的情況下單個電機最大輸出電流為2.5A。實驗仿真結果如圖8所示,輸出的最大絕對值為32767,對應電機最大輸出電流2.5A,正負僅代表輸出方向。
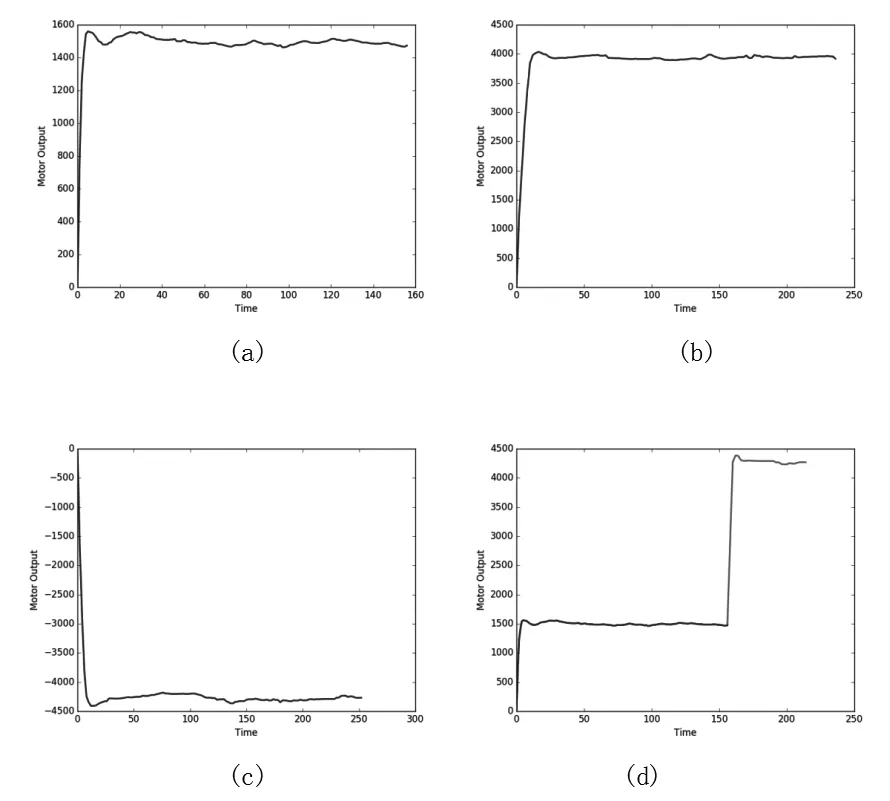
圖7 Roll軸不同負載電機輸出波形圖
圖7(a)為負載處于圖6(a)狀態時,系統保持自穩時的roll軸電機輸出波形圖,此時負載重心接近roll軸的中心位置,克服負載本身重量所需要的轉矩較小。
圖7(b)為負載處于圖6(b)狀態時Roll軸電機輸出波形圖,此時負載重心偏離roll軸中心位置較遠,因此克服負載本身重量所需的轉矩較大。
圖7(c)為負載處于圖6(c)狀態時Roll軸電機輸出波形圖,此時負載重心偏離roll軸中心位置較遠,與圖6(b)偏離的方向相反,因此克服負載本身重量所需的轉矩較大,電機的輸出方向與圖7(b)相反。
圖7(d)為在圖6(a)保持自穩的狀態下,在負載最左端人為突然增加一個適度的力時roll軸電機的輸出波形圖,可見,電機快速地調整到輸出大小,在新的狀態下保持自穩。
由圖7(a)~(d)的實驗結果說明,在電機輸出轉矩的極限范圍內,該控制方法對負載的適應范圍廣,能夠適應多種不同負載,電機響應快速,抗擾性強,魯棒性好。
[1]陳戍東,田躍,李杰,等.基于磁角度傳感器云臺控制系統的設計與研究[J].傳感器與微系統,2007,26(11):72-74.
[2]吳益飛,李勝,蔡驊.基于MSP430單片機的云臺控制系統設計與實現[J].微計算機信息,2006,22(20):91-93.
[3]余寶意,裴海龍.無人直升機云臺控制系統的設計與實現[J].自動化與儀表,2012,27(9):48-51.
[4]李湘清,孫秀霞,彭建亮,等.基于運動補償的小型無人機云臺控制器設計方法[J].系統工程與電子技術,2011,33(2):377-379.
[5]劉俊承,基于DSP和陀螺儀的視覺云臺設計[J].微計算機信息,2008,24(5):143-144.
[6]侍磊,韓寶玲,羅慶生,等.球形智能機器人云臺控制系統的設計與實現[J].機械設計與制造,2011(3):148-149.
[7]郭陽志,張婷.微小型無刷云臺電機驅動的研究[J].湖北工業大學學報,2016,31(1):63-66.
[8]王成元,夏加寬,孫宜標.現代電機控制技術[M].北京:機械工業出版社,2008:103-113.
[9]張強,任一峰,林都,等.空間矢量脈寬調制算法(SVPWM)的原理及其仿真研究[J].PE電力電子,2010(6):35-40.
[10]呂印新,肖前貴,胡壽松.基于四元數互補濾波的無人機姿態解算[J].燕山大學學報,2014,38(2):175-180.
[11]劉興川,張盛,李麗哲,等.基于四元數的MARG傳感器姿態測量算法[J].清華大學學報(自然科學版),2012,52(5):627-631.
猜你喜歡
計算機應用(2023年1期)2023-02-03 03:09:28
音樂天地(音樂創作版)(2022年10期)2023-01-13 05:47:42
湘潮(上半月)(2022年5期)2022-12-06 03:02:28
計算機應用(2022年2期)2022-03-01 12:33:42
計算機應用(2022年1期)2022-02-26 06:57:42
計算機應用(2021年4期)2021-04-20 14:06:36
數學小靈通(1-2年級)(2021年3期)2021-04-13 01:01:58
計算機應用(2021年3期)2021-03-18 13:44:48
計算機應用(2021年1期)2021-01-21 03:22:38
數學小靈通·3-4年級(2017年11期)2017-11-29 01:35:50