基于感知哈希算法的目標跟蹤研究
2018-03-20 09:09:57武漢理工大學
電子世界 2018年4期
武漢理工大學 張 宇
1.感知哈希算法
1.1 原理
隨著數據增長,尤其是圖像數據的快速增長,人們對于圖像集的快速查重校對的需求越來越大,感知哈希算法應運而生。它屬于哈希算法的一種,可以將圖片提取成一個哈希指紋。每一個指紋都是一個哈希矩陣。通過比較兩張不同的圖片的指紋相似度,我們得出它們的內容相似度。常見的感知哈希算法分為兩種,均值哈希算法和增強哈希算法。前者更快速,而后者更加精確。它們兩者都依賴于一個前提,即圖像的信息大多隱藏在低頻信息中,通過濾除掉圖像的邊緣,角點等高頻信號可以更好的體現一張圖片的特征。
1.2 算法步驟
1.2.1 均值哈希算法
首先將圖片灰度化并縮小為8*8的圖片,該方法認為低頻信息在任何分辨率下都被完好的保存下來。
計算8*8矩陣的平均值。
比較矩陣中每個像素和平均值的大小關系,大于為1,小于為0。
得到的矩陣即為哈希指紋。
1.2.2 增強哈希算法
改進后的算法利用了離散余弦變換,將圖像的低頻信息更精確的提取了出來,再取得最低頻的一部分進行計算。
首先將圖片圖片灰度化,并縮小為32*32大小。
將得到的矩陣進行離散余弦變換,得到等大的矩陣。
取得左上角頻率最低的8*8的信息矩陣。
計算8*8矩陣的平均值。
比較矩陣中每個像素和平均值的大小關系,大于為1,小于則為0。
即得到哈希指紋。
1.3 相似度比較
當需要比較兩個不同圖像的相似度時,我們首先通過上面兩種方法得到他們的哈希指紋,然后計算兩個矩陣之間的漢明距離,即相同位置的像素同為1或0,漢明距離不增加,不同則漢明距離加1。當漢明距離大于等于10,則認為不相似,小于10,認為相似。

2.跟蹤系統設計
應用計算機視覺技術進行運動目標跟蹤,通常分為三個步驟,首先進行運動檢測,再進行后處理,比如形態學開閉運算,最后是跟蹤環節。
2.1 跟蹤預處理
運動檢測環節應用成熟的混合高斯模型,這里以交通應用場景為例,檢測環節將得到的結果是運動車輛的前景部分,如圖2-1所示。之后需要進行形態學開運算,將微小的噪點濾除掉,因為跟蹤輪廓需要首先得到準確的輪廓外框矩形,即車輛準確位置。
2.2 跟蹤方法
上述步驟將視頻中的每一幀的前景輪廓找出,接下來應用感知哈希算法跟蹤。具體思路是,首先用外接矩形圈出每一個車輛,將每一個矩形提取出來作為圖像保存,跟蹤就是將每兩幀之間的相同車輛進行匹配,具體到這個算法就是計算每一幀所有車輛矩形圖像的哈希指紋,計算它們與上一幀的所有指紋的相似度,若漢明距離小于10,則認為非常相似,是同一輛車,將它們標注同一個標號,在圖像中標出,若沒有匹配成功,則作為新進入視野的車輛,標注新的編號,上幀的車輛沒有匹配的視為退出視野范圍。跟蹤的總體思路如圖2-2。
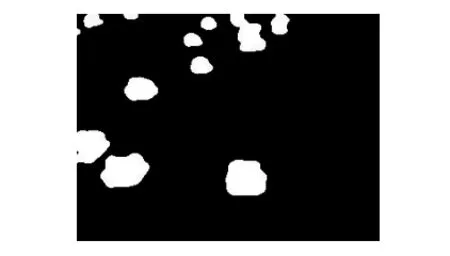
圖2-1 預處理前景

圖2-2 跟蹤思路
3.實驗結果與結論
根據如上方法對交通視頻進行處理,得到了不錯的實驗結果,如下圖分別為相隔5幀的兩張圖像,以及它們的增強型哈希指紋圖。本文的算法準確的將它們標為統一編號,它們的哈希指紋,漢明距離很小,達到了相似匹配的目的,足以證明跟蹤算法的可靠性,可見感知哈希算法在跟蹤領域的應用是可行的。作為一個高效率算法,有著極好的應用前景。

圖3-1 跟蹤標號圖
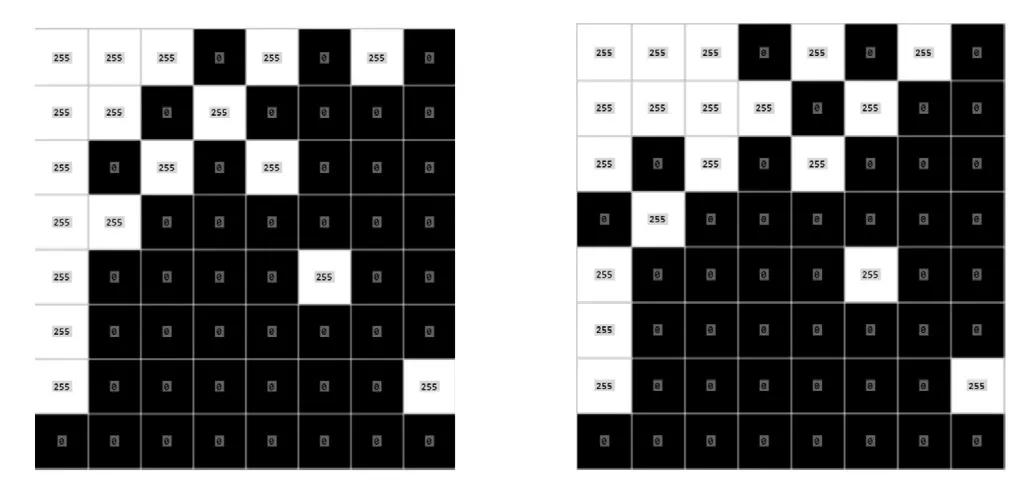
圖3-2 兩個矩形圖像的哈希指紋,漢明距離為3
[1]Thierry Bouwmans. Traditional and Recent Approaches in Background Modeling for Foreground Detection:An Overview[J].2014,s 11-12:31-66
[2]Andrews Sobral. A comprehensive review of background subtraction algorithms evaluated with synthetic and real videos[J].2014,122(May 2014):4-21
[3]Bhattacharjee, S.and Kutter,M.:Compression tolerant image authentication.In Proceedings of the International Conference on Image Processing(ICIP),vol.1,pp.435{439.IEEE,Oct.1998.