基于MSP430系列單片機控制的智能小車
2018-03-20 09:10:00湖南鐵道職業技術學院勇中車株洲電力機車有限公司王梨英
電子世界 2018年4期
湖南鐵道職業技術學院 王 勇中車株洲電力機車有限公司 王梨英
0 引言
隨著現代通訊和信息技術的發展,智能控制小車的研究越來越熱,更多的研究者在紅外遙控、超聲波檢測和人體紅外避障等方面做了大量的研究,此外在遇到障礙物時,除開避障還需要具有聲光報警功能。本文基于此,采用MSP430系列單片機,設計了一款智能控制小車,該小車具有紅外檢測和遙控功能,具有非常精確的避障功能。
1 系統整體方案設計
本設計以MSP430單片機為控制核心,系統主要分為L298N電機驅動模塊、紅外對管測速模塊、溫度測量模塊、濕度測量模塊、甲烷濃度測量模塊、超聲波測距模塊、上位機顯示模塊、NRF2401無線收發模塊、報警器模塊、單片機控制模塊。系統整體的硬件設計框圖如圖1所示。
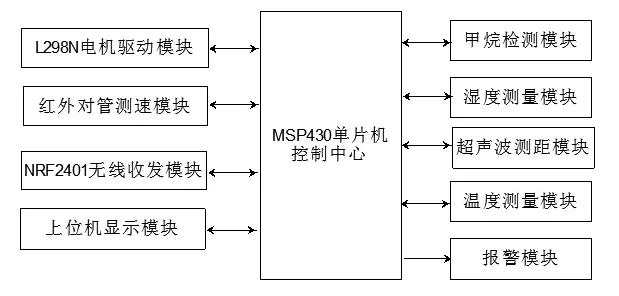
圖1 系統框圖
2 系統硬件整體設計
2.1 電機控制模塊
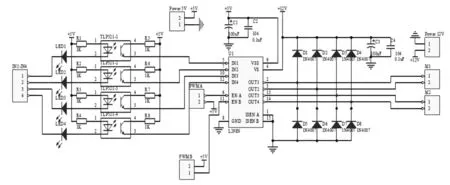
圖2 電機驅動模塊圖
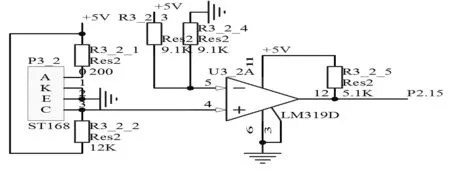
圖3 測速模塊圖
電機驅動采用L298N來實現的,由四個IO口經四個與門再由L298N輸出四路信號來控制兩電機。其控制電路圖如圖2所示。
2.2 測速模塊
測速模塊主要是由st188和輪胎的黑白間條組成。由于此車胎被處理成為黑白兩種顏色,通過比較器設置的門限值,可以很方便的感知地面的顏色。在黑線檢測電路中用LM324來確定紅外接收信號電平的高低,以電平高低判斷黑線有無。從而判斷車胎的轉速,測算出車速。其電路如圖3所示。
2.3 超聲波測距模塊
超聲波發射器向某一方向發射超聲波,在發射時刻的同時開始計時,超聲波在空氣中傳播,途中碰到障礙物就立即返回來,超聲波接收器收到反射波就立即停止計時。超聲波在空氣中的傳播速度為340m/s,根據計時器記錄的時間t,就可以計算出發射點距障礙物的距離(s),即:s=340t/2,超聲波測距模塊原理圖如圖4和圖5所示:
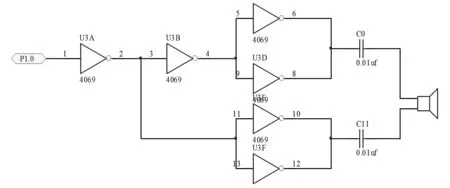
圖4 超聲波發射電路原理圖
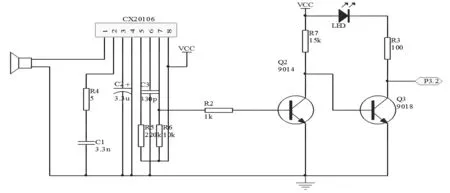
圖5 超聲波接收電路原理圖
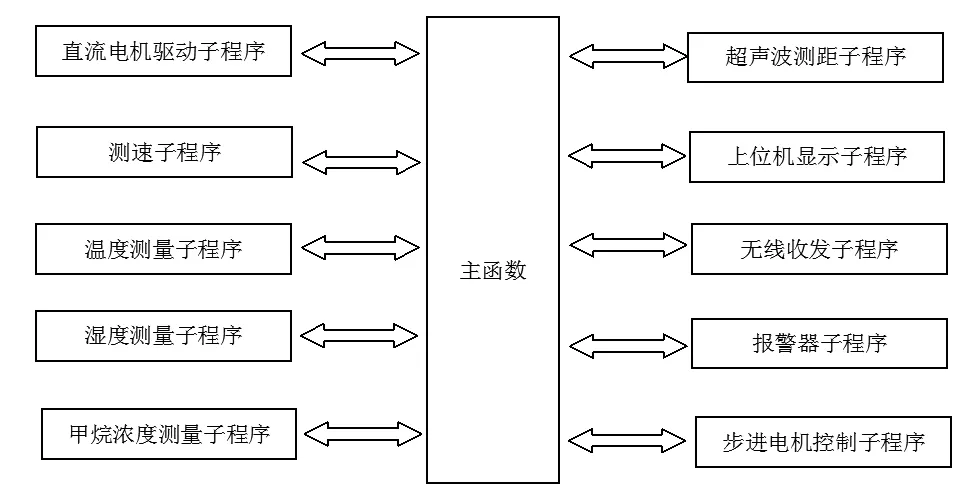
圖6 系統程序流程圖
3 系統軟件設計
對應硬件系統的相應功能,在進行軟件設計時,主要包括超聲波測距模塊、直流電機驅動模塊、步進電機驅動程序模塊、測速模塊、溫濕度檢測以及上位機顯示模塊等,其框架與功能示意圖如圖6所示。
4 系統測試
本設計結構簡單,調試方便,系統反映快速靈活,硬件電路由可拆卸模塊拼接而成有很大的擴展空間。經驗收測試,該智能小車設計方案正確、可行,各項指標穩定、可靠(見圖7)。

圖7 智能小車實物圖
5 結論
本文通過軟硬件的設計,完成了一款智能控制小車的設計,經過設計和實驗驗證,該智能小車能檢測人體障礙以及其他障礙物的存在,且距離精準,此外,具有超聲波測速功能,能根據周圍環境的變化,進行周圍溫濕度及甲烷濃度的檢測,根據要求可以進行聲光報警功能。
[1]李佐彪,陳海娃.基于Android的智能控制小車APP[J].赤峰學院學報(自然科學版),2017,33(06):29-31.
[2]朱小燕.淺談智能控制小車的設計[J].機電信息,2011,112(18):180-182.
[3]李海波,陸善婷.基于3D打印技術的智能控制小車的設計與制作[J].產業與科技論壇,2014,13(20):51-52.
[4]徐愛鈞,徐陽著.KeilC51單片機高級語言應用編程與實踐[M].北京:電子工業出版社,2013,6:157.
猜你喜歡
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
電子制作(2019年13期)2020-01-14 03:15:28
電子制作(2019年15期)2019-08-27 01:12:10
電子制作(2019年9期)2019-05-30 09:42:02
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32