基于ARM系統(tǒng)的旋翼飛機的設計
2018-03-22 11:44:14戴亦宗
電子技術與軟件工程 2018年3期
摘 要 基于STM32F427的ARM構架微控制器來實現四旋翼飛行控制系統(tǒng),構建了飛行器的基本結構,機械結構實現了模塊化設計。飛行控制器通過采集加速度傳感器、三軸姿態(tài)傳感器、地磁傳感器傳感器信號,采用經典PID算法研究控制系統(tǒng)的參數,輸出PWM波形來控制四個電機轉速,實現四旋翼飛行器姿態(tài)的控制調節(jié)。試驗測試表明,該系統(tǒng)能夠在搭建的狹小空間主動避開障礙,具有穩(wěn)定飛行的能力。
【關鍵詞】機體構架 姿態(tài)傳感器 信號濾波 PID算法
1 引言
20世紀90年代后期,隨著微機電系統(tǒng)、傳感器技術的成熟及慣性導航系統(tǒng)的開發(fā),使得多旋翼飛行器的自動控制變?yōu)楝F實。目前,旋翼無人機具有定點懸停等固有特性,能在復雜條件下起飛及降落,并且不需要特殊起降場地,具有較高的自動化技術,方便搭載不同的設備以實現不同的用途,其在軍事、民用領域得到越來越廣泛的應用。
本文設計了基于ARM系統(tǒng)的旋翼飛機,包括基本結構的選擇,機械結構的模塊化設計,系統(tǒng)硬件設計、避障方案及現場調試,試驗測試表明,該系統(tǒng)能夠在搭建的狹小空間主動避開障礙,實現穩(wěn)定飛行。
2 結構設計
2.1 基本結構框架
多旋翼無人機根據旋翼數目不同及安裝結構不同,其飛行性能及控制參數有差異,平鋪四軸架構,特點是結構簡單、便攜,效率較高,飛行平穩(wěn),動力冗余較差。
X8架構,特點是較為便攜,動力冗余充足,飛行平穩(wěn)性好。三軸平鋪架構,特點為效率最高,但機械結構復雜,且較難控制。
在進行飛行結構系統(tǒng)選型之前,首先要確定飛機的起飛重量,由于本次設計為輕型多旋翼無人機實驗平臺,將起飛重量限定在7.5kg以內,載重并沒有超過8kg,考慮經濟性和便攜性,僅對X8結構及平鋪四軸結構進行試驗效率分析。實驗采用4010電機槳間距 13cm的結構,測試結果如圖1所示,在起飛重量一定的情況下,共軸雙槳的效率比兩個電機平鋪要小,效率只有82%左右;相同輸入功率情況下,共軸雙槳與只與單電機效率相當,因此,采用四軸平鋪架構。
2.2 機體結構設計
機臂設計,如圖2,根據設計要求,起飛重量為7.5kg,總體結構為四軸平鋪,每軸的平均受力為1875g,每軸平均受力=起飛總重量/機臂總數,已知機臂總長300mm 支撐點距動力端250mm 即支點處受最大應力370MPa,采用3k 15mm 碳纖維方管即可滿足設計要求,并有相當冗余以適應高機動飛行。起落架設計由曲柄連桿機構及舵機和控制電路部分構成,具有自鎖功能,利用曲柄機構的死點特性在不裝配舵機的情況下可以當做固定式起落架,不管降落的時候受到多大的沖擊力,起落架都不會收起來,更大的保護了飛行器的安全。安裝舵機后就是一個收放式起落架,可以自由的收放。起落架固定座采用一體化設計,大大增強了起落架強度,增強了降落時受力的分散,采用碳纖維材料,重量輕,擺動阻力小,不容易損壞舵機。
3 硬件電路設計
系統(tǒng)的飛行控制系統(tǒng)采用模塊化設計,通過采集陀螺儀、加速度計、GPS位置、地磁感器、氣壓、溫度傳感器等信息進行姿態(tài)檢測和控制,控制器控制四個無刷電機作為動力引擎,并通過PWM脈寬調制技術及PPM載波聚合技術控制飛機姿態(tài),從而實現穩(wěn)定飛行和自動駕駛飛行功能,完成多種任務。 通常四旋翼無人控制系統(tǒng)內置FLASH ROM存儲芯片,以便能記錄飛行器執(zhí)行任務時的所有數據(黑匣子),方便對飛行任務進行檢查,也方便對事故原因進行分析與調試。系統(tǒng)控制MUC選擇32bit STM32F427 Cortex M4核心,168 MHz;l256 KB RAM;l2 MB Flash;32 bitSTM32F103同步協(xié)處理器。
3.1 電源模塊
采用Ld1117三端穩(wěn)壓器及MIC5207電源模塊,分別對MCU進行供電,以保住主控供電的穩(wěn)定性。同時加入了自恢復保險絲和反接二極管,充分保護MCU。
3.2 傳感器電路
充分考慮可靠性和穩(wěn)定性,綜合經濟因素。采用 ST公司L3GD20H 16 bit陀螺芯片;MPU-6050加速度芯片;HMC5883L地磁傳感器;MEAS公司MS5611氣壓芯片。如圖3-圖6所示。
飛行器運行狀態(tài)數據采集采用FM25V01 128K非易失存儲器存儲芯片。這種存儲器速度快,掉電不會丟失數據,一般用來做備份數據存儲,一旦飛控空中故障重啟,可以延續(xù)前面的狀態(tài)和計算結果。
飛行器避障設計超聲波傳感器方案,通過軟件設置濾波,達到較好的使用效果。避障系統(tǒng)采用外掛式模塊化設計,外置MCU與飛行控制器進行通訊,將采集到的傳感器信息進行處理與判斷,并將輸出結果反饋回飛行控制器。
4 系統(tǒng)調試及參數整定
4.1 卡爾曼濾波
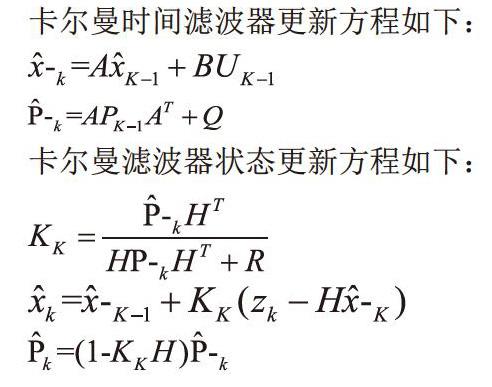
飛行器在運行過程中,各傳感器的測量值必然存在一定的誤差,需進行濾波,防止毛刺或數據異常等突然因素影響飛行的穩(wěn)定性。卡爾曼濾波根據當前時刻的觀測值、上一時刻的預測值及預測誤差,計算得到當前的最優(yōu)量去預測下一刻的量,分為時間更新方程和測量更新方程。
卡爾曼時間濾波器更新方程如下:
卡爾曼濾波器狀態(tài)更新方程如下:
4.2 PID系統(tǒng)調試
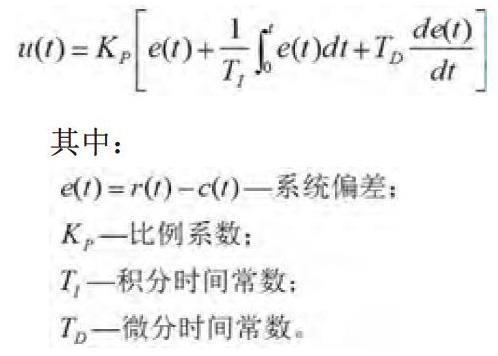
四旋翼無人機在空中飛行時需要控制6個自由度,分別是高度、經度、緯度三個水平自由度,以及俯仰、航向、滾轉三個旋轉自由度,水平自由度就是指位置差,速率和加速度;自由度是指的角度差,角度率和角加速度。系統(tǒng)采用PID控制方案,由于四旋翼無人機在空中收影響因素較多,故無法單純從理論計算得出確切的PID參數值,通常的調整順序為:先調整參數P,再加入I,最后調整D,比例調節(jié)將實際值與理想值之間的誤差以放大P倍調節(jié),因此理論上參數P越大越好,但過大的P值將會導致超調量過大,所以在調參時P調到不讓飛行器產生抖動的最大值。
其中:
若四旋翼飛機無法起飛;且加大電機轉速情況下發(fā)生傾覆等現象。根據經驗,減小I的數值可以解決問題,若四旋翼起飛后,高頻抖動,電機產生高頻噪音。根據上述分析,可能 P過大造成的不斷高速超調,減小P的數值基本上可以解決。若四旋翼起飛正常并無高頻振蕩,但操作反應遲滯且較難穩(wěn)定,根據經驗,I的數值過大,造成過程極其緩慢,所以適當減小I可以解決問題。如圖7所示。
為了調節(jié)飛行器的 PID 值,使飛行器能夠穩(wěn)定飛行,系統(tǒng)對各軸陀螺儀與加速度波形進行觀察,采集到飛行器飛行過程中的部分姿態(tài)數據如圖8、9所示 系統(tǒng)根據采集到的加速值及陀螺儀數據值對飛行姿態(tài)進行控制,從而使得飛行器平穩(wěn)飛行。
5 結語
本文針對旋翼飛行器的結構特點,設計了四旋翼飛行器的機械結構、硬件電路和程序算法,采用經典PID 控制器進行姿態(tài)角控制。經測試,系統(tǒng)的穩(wěn)定性能、動態(tài)性能、飛行避障均達到的設計要求。
參考文獻
[1]陳海濱,殳國華.四旋翼飛行器的設計[J].實驗室研究與探索,2013,32(03):41-44.
[2]李寧.基于MDK的STM32處理器開發(fā)應用[M].北京:北京航空航天大學出版社,2009.
[3]周杏鵬.傳感器與檢測技術[M].北京:清華大學出版社,2010(09).
[4]鮑齊克.數字濾波和卡爾曼濾波[M].凌云旦譯.北京:科學出版社,1984.
[5]葉利棟,都慶慶等.基于STM-32的自動四旋翼飛行器設計[J].上海工程技術大學學報,2015,29(01):49-52.
[6]王福超.四旋翼無人飛行器控制系統(tǒng)設計與實現[D].哈爾濱:哈爾濱工程大學,2013.
[6]McKerrow P.Modeling the Draganflyer four-rotor helicopter[C].IEEE Intemationa Confereneeon Roboties and Automation.2004:3596-3601.
作者簡介
戴亦宗(1981-),男,江蘇省揚州市人。研究生,碩士學位。現為揚州職業(yè)大學電氣與電氣工程學院副教授。主要研究方向為自動化控制技術。
作者單位
揚州市職業(yè)大學 江蘇省揚州市 225001
