正碰中假人小腿y向彎矩與x向剪切力間的關聯性研究
2018-03-27 03:28:53商恩義韓剛柳惠君張毅
汽車技術 2018年3期
商恩義 韓剛 柳惠君 張毅
(浙江吉利汽車研究院有限公司,浙江省汽車安全技術研究重點實驗室,杭州 311228)
1 前言
中國新車評價規程(C-NCAP)中規定有正面全寬碰撞試驗。試驗中,試驗車上安放假人,該假人小腿上端和下端分別裝有傳感器。對于碰撞過程中傳感器采集到的數據,由于假人腳下運動復雜,小腿與儀表板接觸方式千變萬化,加上可能發生的儀表板變形、防火墻侵入等影響,各數據的變化規律性差,如果分別獨立分析,對小腿傷害過程及造成傷害的原因很難作出明確判斷。
另外,C-NCAP中,對假人小腿傷害的評價通過小腿軸向力Fz和小腿脛骨性能指標TI確定,其中,TI通過小腿的x向和y向彎矩計算得到[1]。評價過程中,在小腿上、下2個傳感器位置分別評分,選取得分最低者作為最終結果。相關研究表明,正面碰撞試驗中,在腳掌未發生背屈崴腳的情況下,假人小腿上端TI大于小腿下端TI,造成小腿上端TI偏大的主要原因是上端y向彎矩偏大[2]。在腳掌發生背屈崴腳的情況下,假人小腿下端TI偏大,原因是下端y向彎矩偏大[3]。
基于此,本文針對腳下結構無明顯變形、腳掌未發生背屈和腳下結構發生向后侵入變形、腳掌發生背屈兩種工況,分別研究了小腿上端y向彎矩和下端x向剪切力、下端y向彎矩和上端x向剪切力之間的關聯性,以此降低假人小腿試驗數據的復雜性,提升小腿傷害原因分析的準確性,為仿真分析明確優化方向。
2 假人小腿數據間關系式
假人小腿結構如圖1所示,為鋼結構,踝關節為球節。在假人小腿上端和下端分別嵌有載荷傳感器,傳感器之間的距離約為0.24m[4]。試驗中,通常測量x向剪切力(上端剪切力為Fxv,下端剪切力為Fxl,腳踝向前、膝蓋向后為正)、z向力(軸向力,向下為正)及x向彎矩(上端彎矩為Mxv,下端彎矩為Mxl,膝蓋不動、腳踝向左為正)和y向彎矩(上端彎矩為Myv,下端彎矩為Myl,膝蓋向后、腳踝向前為正)[5]。
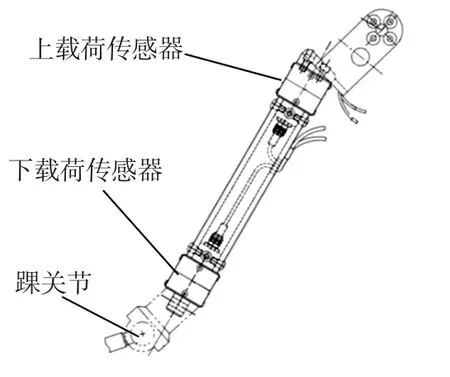
圖1 假人小腿內部結構及傳感器布置
碰撞過程中,當將上端傳感器所采集載荷Myv作為輸入時,對應下端傳感器位置除產生y向彎矩外,x向也應產生一定剪切力與之平衡。同理,當將下端傳感器所采集載荷Myl作為輸入時,對應上端,x向也應產生與之平衡的剪切力。換言之,Myv與Fxl、Myl與Fxv之間應存在一定聯系[6-7],建立關系式:

式中,dl和dv為力臂。
接下來,研究式(1)和式(2)成立的可能性及條件。
3 腳掌無背屈條件下Myv與Fxl的關聯性
在腳下結構無變形侵入、腳掌無背屈的情況下,可視大腿為力的輸入端,腳掌僅受阻止約束,因此,可將歇腳板固定,大腿作為力的輸入端進行靜壓試驗、線性沖擊試驗。鑒于臺車試驗車身前端不變形,也可通過臺車試驗進行腳掌無背屈情況下的Myv與Fxl關聯性研究。
統計分析了14款車駕駛員假人左小腿的擺放角度,其中,最小角度為34°,最大角度為58°,平均角度為49.4°。前排乘員在乘車過程中,大腿與地板近似平行,因此,當小腿與地板成49.4°時,大腿與小腿之間的夾角近似為130.6°。依據此分析結果,后續研究中主要分析大腿與小腿之間的夾角在120°~150°,即小腿的擺放角度在30°~60°之間的情況。
3.1 靜壓試驗
在萬能材料試驗機上,對假人小腿進行了2次靜壓試驗。試驗中,假人小腿的安裝方式如圖2所示,為便于固定,在大腿與小腿連接過程中將大腿旋轉了180°。

圖2 靜壓試驗中假人小腿擺放姿態
3.1.1 第1次靜壓試驗
將小腿與大腿之間夾角調整至120°,即小腿與水平面成30°,進行第1次試驗。試驗后,根據式(1)試取dl建立Myv與Fxl之間的關系,當取dl=0.21m,接近小腿上、下傳感器間的距離0.24m時,Myv與dlFxl曲線基本重合,如圖3所示。
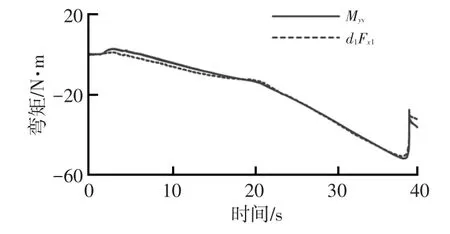
圖3 靜壓試驗中dl=0.21m時小腿Myv與dlFxl的關系
3.1.2 第2次靜壓試驗
將小腿與大腿間夾角調整至135°,即小腿與水平面成45°,設置壓頭的下壓速度和最大壓力與第1次試驗相同。第2次試驗后,根據式(1),試取dl建立Myv與Fxl之間的關系。最終,dl取值近似為0.15m,接近小腿上、下傳感器間距離的一半時,曲線近似重合。
3.1.3 小結
靜壓試驗結果表明,在靜壓下,上端輸入的彎矩幾乎完全由下端產生的剪切力平衡,剪切力力臂長度與假人小腿和大腿之間的夾角有關,夾角越大力臂越小:當夾角處于135°(小腿與地面成45°)時,力臂的長度接近上、下傳感器間距離的一半,小腿產生對折的趨勢明顯;當夾角處于120°(小腿與地面成30°)時,力臂增大,更接近上、下傳感器之間的距離。
3.2 動態沖擊試驗
利用線性沖擊試驗設備對假人小腿進行動態沖擊試驗研究。假人小腿擺放如圖4a所示,小腿與地面成60°。實際碰撞試驗中,大腿由于慣性前沖,可以繞臀部關節轉動,因此,為了盡可能地模擬實際碰撞中大腿的運動姿態,將推動裝置與大腿連接處采用近似球節(在空間上有約20°的自由活動角度)的連結方式。試驗時,將推桿推出的最高速度設定為1.5m/s,設定沖擊推桿的推動行程為200mm。
試驗后,假人小腿姿態如圖4b所示,假人腳部未發生任何移動。實車碰撞中,假人腳部將隨著小腿向前竄動,動態沖擊試驗結果表明,該試驗未能完全真實地反映整個碰撞過程中假人小腿的運動及受到的傷害,但反映了腳掌被約束后的試驗過程,試驗結果能夠用來進行小腿傷害研究。另外,動態試驗與實車碰撞試驗之間的差異也反映了實車碰撞中假人小腿及腳部向前運動是由于其自身的慣性,而非大腿對其向前推動的結果。
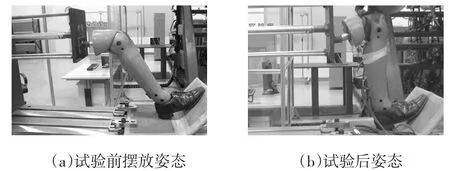
圖4 動態沖擊試驗前、后假人小腿姿態
根據式(1)試取dl建立Myv與Fxl之間的關系,當取dl=4.3m時,整個過程中曲線近似重合,如圖5所示。該結果表明,雖然dl的取值不小于0.24m,與靜壓試驗表現不同,但式(1)適用,對于dl偏大,應和推桿與大腿連接方式與實際不符和推桿角度不可調有關。
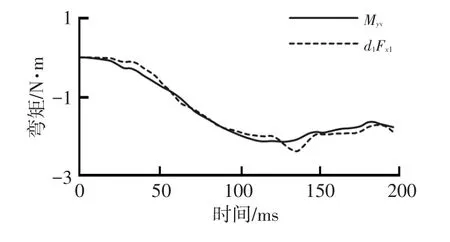
圖5 動態試驗中dl=4.3m時小腿Myv與dlFxl的關系
3.3 臺車試驗
借助臺車試驗對假人小腿Myv與Fxl間的關聯性做進一步研究。為了降低小腿在運動過程中的復雜性,選取一款SUV的臺車開展研究。試驗中,駕駛員假人左小腿的擺放角度為58°,碰撞過程不同時刻狀態如圖6所示。
圖6a中,碰撞后前14ms,大腿與小腿保持相對靜止狀態。比較圖6a與圖6b,約第14ms后,大腿和小腿整體向前平動。比較圖6d與圖6c中假人小腿和大腿角度,約第34ms時,腳掌不再向前竄動,隨后,膝部開始產生彎曲,大腿繞小腿向上轉動,約第40ms時,膝部接觸儀表板。與圖6c相比,圖6d中假人小腿角度略大,表明第40~45ms期間,膝部撞擊儀表板后儀表板發生快速變形。第45ms后,小腿受儀表板約束中止向前運動。
根據式(1),取dl=0.12m,建立駕駛員假人小腿Myv和Fxl間對比關系如圖7所示。
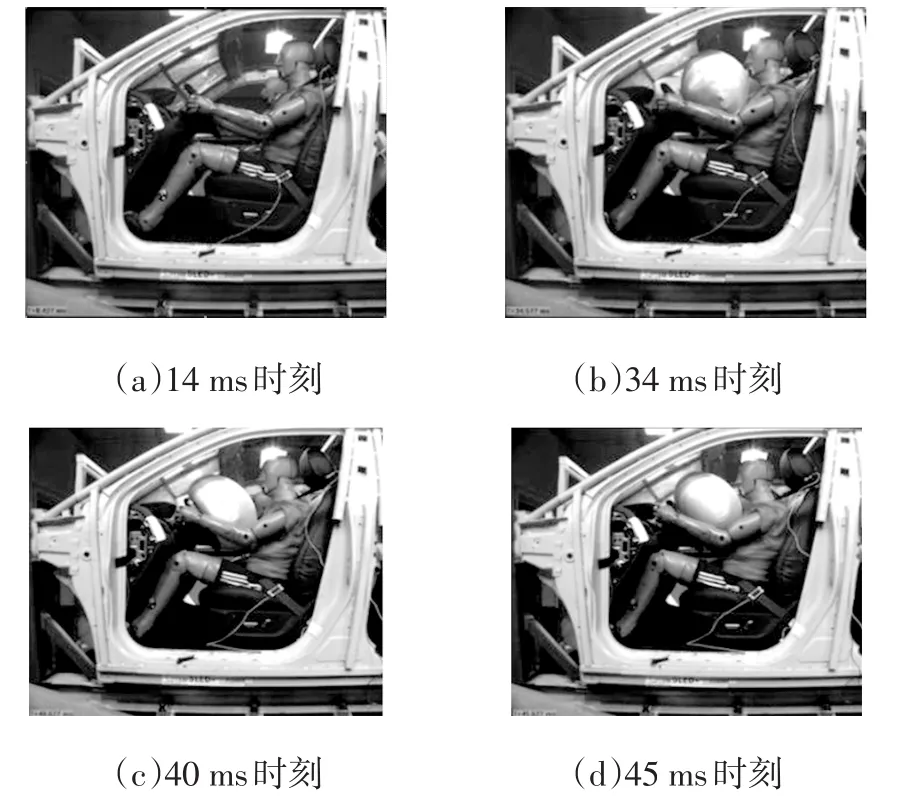
圖6 碰撞過程駕駛員側假人不同時刻狀態
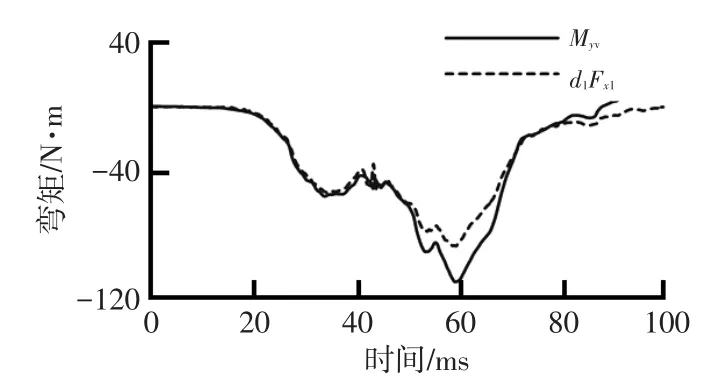
圖7 dl=0.12m時假人小腿Myv與dlFxl的關系
圖7中,約第45ms之前,Myv與dlFxl曲線重合較好;其后,兩曲線重合性較差,但形狀相似,表明取dl=0.12m對后續階段不適合。考慮到第45ms之后膝部與儀表板發生擠壓后相對靜止,另外,兩次靜壓試驗中,隨著大腿和小腿間夾角減小,即小腿角度增大,dl取值應越大,以及隨著膝部與儀表板的擠壓僵持,小腿角度已經很大,故取dl=0.15m,再次建立小腿Myv和Fxl間關系如圖8所示。圖8中,約50~70ms區間重合較好。
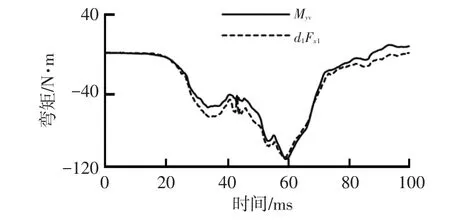
圖8 dl=0.15m時假人小腿Myv與dlFxl的關系
圖7和圖8中,dl分別取0.12m和0.15m,使式(1)分階段成立,很好地反映了動態沖擊中系數關系存在,以及靜壓試驗中當小腿和大腿之間的夾角小于135°時對折點上移的特性。
臺車試驗結果表明:碰撞過程中式(1)分階段成立。
3.4 實車試驗符合性檢驗
隨機檢驗了11次實車正面全寬碰撞試驗結果,經三坐標測量數據分析、試驗前、后假人腳下位置照片對比分析,確認10次碰撞試驗中駕駛員假人腳下結構無后侵變形,其中,包括1次56km/h正面全寬碰撞、1次64km/h正面全寬碰撞和1次帶膝部氣囊的50km/h正面全寬碰撞試驗的試驗數據。以某車56km/h正面碰撞試驗結果為例,檢驗駕駛員側假人左小腿數據對式(1)的符合性。
根據式(1),分別取dl=0.12m和dl=0.15m,建立假人左小腿Myv和Fxl間對比關系如圖9所示。
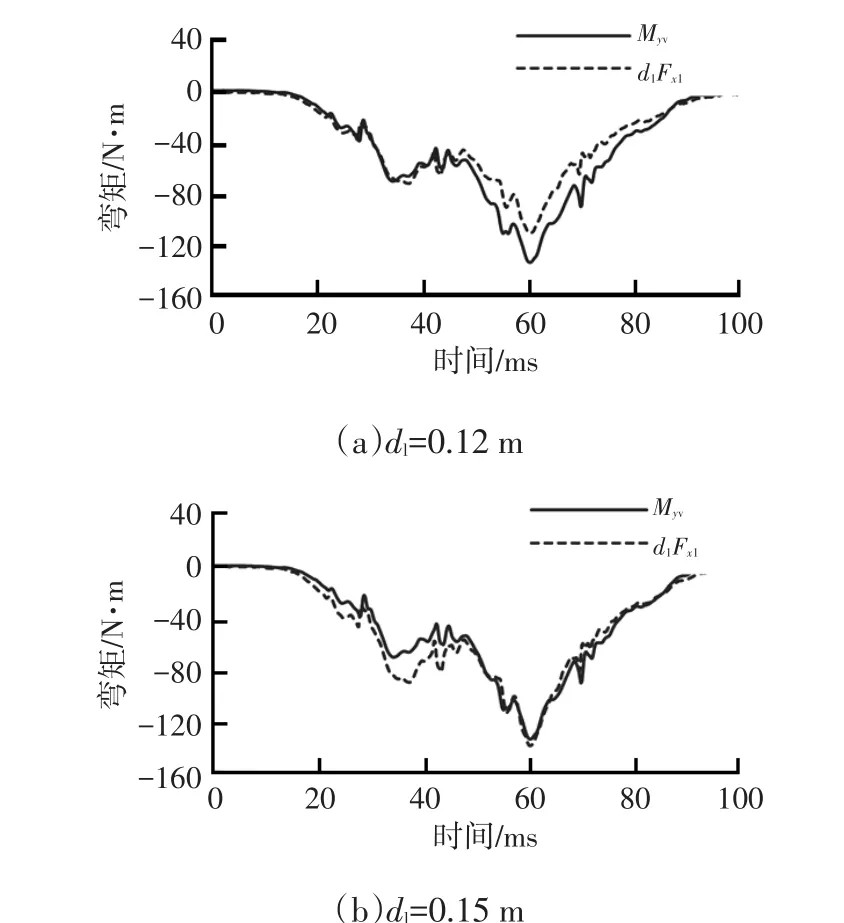
圖9 dl不同取值條件下假人小腿Myv與dlFxl的關系
圖9a中,約第45ms之前,Myv與dlFxl曲線重合較好。圖9b中,約第45ms之后,Myv與dlFxl重合較好。該結果表明式(1)分階段成立。整個碰撞過程中,駕駛員假人左小腿表現為對折趨勢明顯,碰撞后期Myv值較大,為失分點。Myv值后期較大的主要原因非力臂突然上升所致,而是Fxl迅速增強造成,因此,后續優化過程應從降低小腿Fxl入手,如調整歇腳板的角度、基礎剛度來減弱腳掌的受阻止強度,增強安全帶腰帶的約束作用來緩解臀部的前沖程度進而緩解小腿的前擠強度等。式(1)在此試驗結果中的運用使造成小腿Myv偏大的原因分析一目了然,使后期優化點的確定更加集中。
分析式(1)成立的普遍性。針對假人腳下無后侵變形的其它9次試驗,依次試取dl,分析結果是各試驗中式(1)均成立,但個別試驗中dl的取值并不穩定,如起步階段和與儀表板碰撞過程中均取dl=0.15m,而兩個階段之間卻出現取dl=0.12m的情況;起步階段取dl=0.12m,與儀表板碰撞過程中取dl=0.16m,而后再次出現取dl=0.14m的情況。造成dl取值發生前述變化的原因,通常為小腿起步階段運動速度的差異、大腿與小腿之間角度的差異,碰撞過程中儀表板剛度的大小差異、小腿與儀表板接觸時角度不同的影響等等。因此,利用式(1)進行約束系統優化時,確認dl取值變化的影響因素,恰好是分析的目的所在,可以為后續CAE工作明確方向。
4 腳掌背屈條件下小腿Myl與Fxv的關聯性
腳掌在發生背屈時可視為力的輸入端,因此,利用假人足部標定裝置固定大腿,用推力計推前腳掌中心,模擬歇腳板或腳踏板后侵情況下小腿Myl與Fxv的關系。
4.1 腳掌擺正靜推試驗
如圖10所示,將大腿前端固定,擺正腳掌,使大腿軸線、小腿軸線與腳掌中截面處于同一平面內,并將腳掌推向小腿消除自由轉動角度,而后,用40N左右的推力向斜向下方推前腳掌中心位置。試驗后,依據式(2),試取dv建立Myl與Fxv之間的關系如圖11所示。圖11中,當取dv=0.23m時,兩曲線吻合較好。

圖10 腳掌擺正靜推試驗
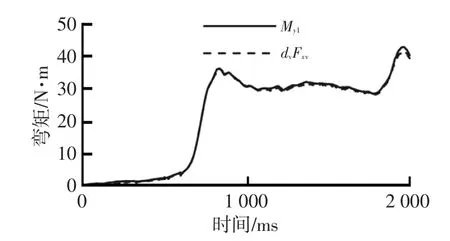
圖11 dv=0.23m時假人小腿Myl與dvFxv的關系
4.2 腳掌側扭靜推試驗
如圖12所示,將大腿前端固定,擺正大腿和小腿,并側扭腳掌,使腳掌的中截面與大腿和小腿軸線所處的平面成30°,同時,將腳掌推向小腿消除自由轉動角度,而后,用40N左右的推力向斜向(如圖12所示)推前腳掌中心位置。試驗后,試取dv建立Myl與Fxv之間的關系,當取dv=0.2m時,兩曲線吻合較好,如圖13所示。

圖12 腳掌側扭靜推試驗
腳掌靜推試驗表明,當歇腳板或腳踏板后侵導致腳掌發生背屈時,小腿Myl與Fxv間存在穩定的關系,式(2)成立,式中,dv取值接近上、下傳感器之間的距離0.24m。
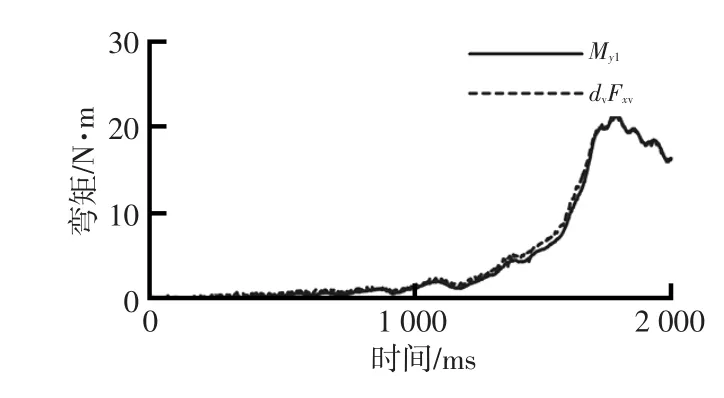
圖13 dv=0.2m時假人小腿Myl與dvFxv的關系
4.3 實車試驗符合性檢驗
某款車50km/h正面碰撞試驗三坐標測量結果為腳掌位置侵入15mm,腳后跟位置侵入5mm,歇腳板發生內翻式侵入,試驗后歇腳板位置如圖14所示,歇腳板向后侵入明顯,也反映試驗中前腳掌發生了背屈。

圖14 試驗后駕駛員假人左腳位置
檢驗式(1)的符合性。取dl=0.12m時,駕駛員假人小腿Myv和dlFxl的關系如圖15所示,在第53ms后,曲線不再重合,且其趨勢完全不同,不存在簡單的dl值能使其重合的可能性。另外,第53ms后若要取dl值,與通常式(1)中dl后期取值應增大的趨勢將完全相反,dl的取值將減小。因此,此試驗中式(1)不成立。

圖15 dl=0.12m時假人小腿Myv與dlFxl的關系
依據式(2)建立小腿Myl和Fxv間的比較關系,取dv=0.24m時曲線全程接近吻合,如圖16所示。該結果表明,碰撞試驗中,當防火墻、歇腳板向后侵入時,假人腳部將成為力和力矩的輸入端,此種情況下Myv和Fxl間的關聯關系不完全成立,而Myl和Fxv間的關聯關系成立。再次分析圖16,第53ms之后,小腿下端y向彎矩由負轉向正向,且最大值達到91N·m,該值直接導致左下TI達到0.47,超標失分(TI=0.4為滿分點,TI=1.3為零分點)。小腿下端Myl正向表明腳掌受力,正向值導致失分則表明歇腳板上端內侵較大,假人腳掌背屈嚴重[8-9]。
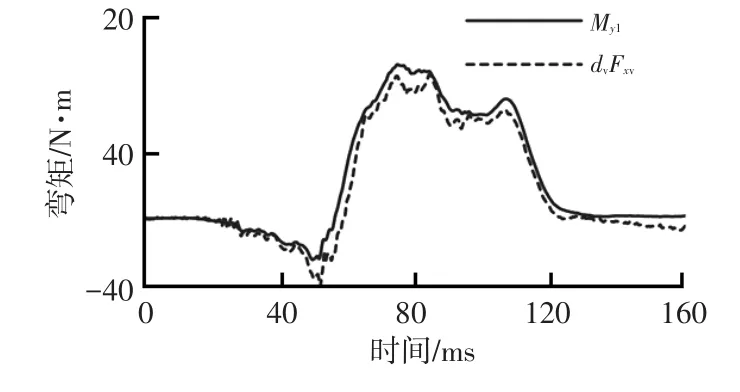
圖16 dv=0.24m時假人小腿Myl與dvFxv的關系
5 結束語
研究表明,在正面全寬碰撞試驗中,有以下結論:
a.腳下結構無侵入時,假人小腿上端y向彎矩幾乎完全由下端x向剪切力平衡。小腿運動時,剪切力力臂約為上、下載荷傳感器距離的一半,即0.12m,小腿對折趨勢明顯;小腿與儀表板擠壓相對靜止時,對折點上移,力臂增大,通常為0.15m;
b.腳下結構后侵導致腳掌發生背屈時,假人小腿下端y向彎矩幾乎完全由上端x向剪切力平衡,剪切力力臂約為上、下載荷傳感器距離0.24m。
[1]中國汽車技術研究中心.中國新車評價規程(C-NCAP)[S/OL].[2018-02-08].http://www.c-ncap.org/upload/201707/03181009g2ci.pdf.
[2]孫振東,朱海濤,劉玉光.正面碰撞試驗中乘員小腿傷害特性研究[C]//中國汽車工程學會.第五屆國際汽車交通安全學術會議論文集,2007.
[3]商恩義,岳國輝,劉珍海,等.偏置碰撞中駕駛員假人腳掌翻轉對小腿傷害的影響[J].汽車技術,2016(1):47-51.
[4] USA Society of Automotive Engineers. User's Manual for the50thPercentile Male Hybrid Ⅲ Test Dummy[S],1998.
[[5] USA Society of Automotive Engineers. Instrumentation forImpact Test – Part1 – Electronic Instrumentation, REV.MAR95: SAE J211-1[S],2003.
[6]商恩義,高勁松.A級車正面全寬碰撞試驗中假人小腿傷害研究[J].汽車技術,2012(7):5-9.
[7]張春林,崔來友,談誠,等.人體足底受力測試及其分析[J].北京理工大學學報,2004(7):567-570.
[8]商恩義.正面偏置碰撞中座椅剛度低對假人小腿傷害的影響[J].汽車技術,2016(10):28-32.
[9]商恩義,劉衛國,周大永,等.正面碰撞試驗中坐墊剛度無效性對乘員傷害影響研究[J].汽車技術,2017(7):19-23.