一種教學用六軸工業機器人的研制
2018-03-27 02:04:33彭建新黃偉朝
中國設備工程 2018年6期
彭建新,黃偉朝
(肇慶市技師學院,廣東 肇慶 526060)
六軸工業機器人在工業生產中應用最廣泛,技工院校教學中也采用最多。由于廠家機器人的價格較高,實訓教學中數量有限。為增加機器人的實訓臺位,需要開發一種具有一定替代性的六軸工業機器人。
1 機器人本體的設計
本文設計了一種負載0.5kg的六軸機器人本體,其機械結構采用工業中廣泛應用的通用六軸工業機器人結構,如圖1。
(1)機器人本體設計主要包括傳動系統、電機選型和減速器的選型設計。本機器人本體采用六軸串聯關節式結構型式。
為簡化結構,機器人的6個關節均采用步進電機和減速器相結合的機械結構。如表1是各關節電機及減速器的型號、參數。
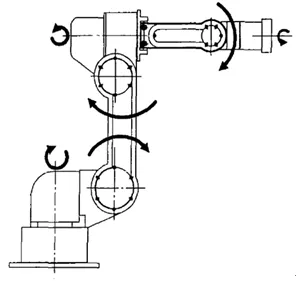
圖1 六軸工業機器人結構
該機器人的主要性能指標有:本體重量:10g,最大回轉半徑 :646mm;負載能力:0.5g;末端定位精度:2mm。既可在PC機界面上操控,也可用手輪操作,PC機示教再現。

表1 電機與減速器的型號與參數
(2)步進電機選型的計算。電機保持力矩必須大于靜態負載扭矩;慣量匹配,即使負載等效慣量不超過電機轉子慣量的12倍;電機保持力矩減去靜態負載扭矩的差值必須足夠大。以上3點是選型步進電機應該滿足的要求。下面以第二軸步進電機為例,說明選型過程。
首先,計算靜態負載扭矩。當大臂和小臂呈直線且水平,手臂端點負載0.5kg,此種情況將產生最大的靜態負載扭矩。用Pro/E軟件的質量計算和重心測量的功能,測量大小臂加負載的總重量M是2.5kg,等效重心到第一軸的距離L是384mm。
靜態負載扭矩T:T=M×g×L。
將負載重量和距離代入上式,計算得到靜態負載扭矩:
T=2.5×9.8×0.384=9.6N·m。
已知減速器減速比i為45,則等效到電機軸的負載:Tz=T/i。
將負載重量和距離代入上式,計算得:Tz=9.6/45=0.213N·m。可見電機的最大靜態扭矩必須大于0.213N·m。
其次,計算等效轉動慣量。已知減速器減速比i為45,等效轉動慣量:
Jd=Jm/i2=M×L2/i2
將重量和長度代入上式,計算得:
Jd=2.5×3842/452=182.04 kg·mm2。
根據慣量匹配原則,要求電機的轉動慣量:
Jm> Jd/12=182.04/12=15.17 kg·mm2。
再次,初步選取電機。電機的最大靜態轉矩Tsm必須大于0.213N·m,且轉動慣量大于15.17 kg·mm2。57BYG76-2.8A電機的最大靜態轉矩1.89N·m,轉動慣量為48kg·mm2,滿足上述2個要求,且有一定余量。
(3)減速器選型計算。最大靜態轉矩和運動精度是減速器選型的主要依據。本文設計的機器人對重復定位的精度要求小于2mm,等效轉換到減速器的回程間隙是4弧分,為簡化結構,采用自制渦輪蝸桿減速器。減速器的極限扭矩大于所傳遞的極限扭矩。本機器人所用減速器按上述要求選擇,如表1所示。
(4)同步帶選型計算。本文所設計的機器人的第一軸采用了同步帶傳動,已知所要傳遞的額定扭矩等于步進電機的保持扭矩1.89N·m。先選擇帶型XL梯形同步帶,再選擇皮帶寬度5mm,皮帶長200,選定皮帶輪的齒數20。如果不滿足要求,可以調整皮帶寬度、帶輪齒數、帶型參數,然后計算校核,這樣循環反復,最終找到合適的目標。
2 運動控制器的選擇
本文所研制的機器人采用現成的nMotion-v5.0運動控制卡。該卡支持Mach3所有的版本,使用USB接口,無需驅動,支持熱插。USB總線采用高檔芯片磁耦隔離,是真正有價值的隔離。雙核超高速CPU(單核最高主頻204MHz)。6軸聯動的脈沖輸出頻率最高達300kHz,可接伺服/步進電機。擁有16路隔離輸入口,輸入接口更簡單,端口干濕接點均可。帶有256字節NVRAM空間,可保存6個軸的座標值,下次上電無需找零點。
該運動控制卡的接線框圖見圖2。PC機通過USB接口與運動控制卡通訊,可完成運動規劃、高速實時插補、伺服濾波控制和伺服控制,同時隨控制器還提供功能強大的運動控制軟件庫,可供用戶根據不同的需要開發應用軟件,組成各種控制系統。
3 機器人控制系統
機器人控制系統用于對機器人的控制,以完成特定的工作任務。由于采用nMotion-v5.0運動控制卡,所以上位機控制系統采用Mach3 Mill程序。上位機選取通用PC機,以較低的成本組成較強性能的系統,而且還方便進行二次開發。

圖2 nMotion-V5.0運動控制卡接線框圖
(1)關于運動學逆解。Mach3 Mill是控制銑床的機床控制系統,最多可控制3個旋轉、3個移動共6個自由度的運動,如用來控制六軸工業機器人的動作,必須進行空間坐標轉換,即將目標點的空間坐標轉換成6個軸的轉動角度。為此,要進行運動學求解和逆解。
首先,建立一個固定的空間坐標系,然后通過坐標參數描述物體在該參考坐標系中的位置和姿態(簡稱位姿)。利用位姿矩陣實現不同坐標系中的空間坐標變換。設空間一點P在坐標系{A}和{B}中的齊次坐標分別為AP=(APX,APY,APZ,1)T和BP=(BPX,BPY,BPZ,1)T;則有關系式:AP=BAT.BP,其中BAT是坐標系B到坐標系A的變換矩陣。
工業機器人的旋轉關節一般分成2種:轉軸平行于連桿的(P型)和轉軸垂直于連桿的(V型),見圖3。1個關節單元由互相垂直的P型和V型關節連接而成。單元i的P型關節記為Pi,軸線方向(指向V型關節的方向)記為Pi;V型關節記為Vi,軸線方向記為Vi。
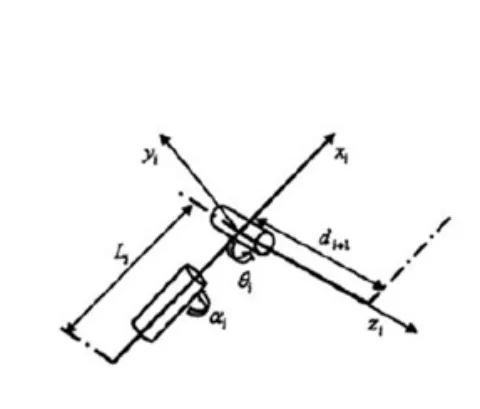
圖3 關節單元模型

圖4 相鄰關節單元的關系
如圖4,從關節單元i的坐標系到關節單元i+1的坐標系變換如下。
①繞著zi軸逆時針旋轉θi,使得xi軸和xi+1軸平行。
②沿著zi軸平移di,使得xi軸和xi+1共線。
③沿著xi+1平移Li+1,使得zi軸和zi+1共面。
④繞著xi+1軸逆時針旋轉аi+1,使得zi軸和zi+1共線。
因此,變換矩陣為:
i+1iT=Rot(z,θi)·trans(0,0,di)·trans(Li+1,0,0)·Rot(x,аi+1)
其中Rot(z,θi)是繞z軸旋轉θi的旋轉矩陣,trans(0,0,di)是在z軸平移di的平移矩陣,其它矩陣均類似。
經過整理,最后得到變換矩陣是:

機械臂運動學方程就是要建立機械臂末端坐標系{n}關于基坐標系{0}的變換方程,只需將n個關節的變換矩陣依次相乘即可。

本文機器人有6個自由度,可以靈活地在三維空間中運動。該機械臂系統由4個關節單元連接而成,各個關節單元的參數見表2。
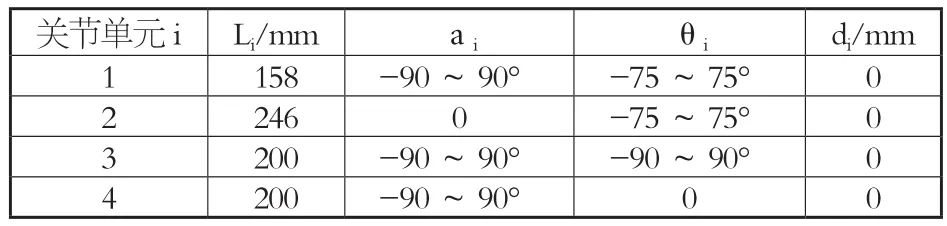
表2 機械臂結構參數
求解運動學方程也就是所謂機械臂的運動學逆問題,已知末端位置EG(或末端位姿EAT),求а1,θ1,а2, …а4。 設 P=(0,0,0,1)T, 則 有關系式 EG=EAT.P,求解方程:BAT(а1).CBT(θ1).DCT(θ2,а3).EDT(θ3,а4)=EG 則可得到各關節角度а1,θ1,а2,…а4。求解的方法有很多,限于篇幅這里不贅述。
(2)關于控制系統有關參數設置。①電機單位當量脈沖數。本機器人使用是二相步進電機,單位脈沖當量=200×驅動器細分數×減速比/絲桿導程(螺距),如驅動器細分數=16,絲桿導程=4mm,減速比=45,則單位當量=200×16×45/4=36000。對于轉動,則角度脈沖當量=200×16×45/360=400,即每400脈沖轉過1°。②Mach3中輸入信號的配置。本運動卡的輸入信號編號從1到16,在Mach3中配置為低電平有效,端口號(Port Number)為2。
(3)爪手的控制。利用運動控制卡對主軸電機的控制功能來控制爪手的動作。用對主軸電機驅動的PWM信號來控制舵機,用舵機來直接控制爪手。一般脈寬在1~2ms,所以PWM信號頻率500~1kHz。用主軸繼電器通斷(M3M5)控制舵機信號的通斷。
4 效果
該六軸機器人相對于企業成熟的機器人,具有以下優勢:價格低廉,能配備較多的實訓工位;便于學生觀察機器人的結構,深入體會其工作原理。
便于學生直接參與機器人的裝配,通過對各關節機械傳動的理解,為機器人的維修保養課程打基礎;開源軟件能讓學生深入理解、編寫控制程序;取材容易,結構簡單,易于操作,性能穩定,安全可靠。當然,與企業成熟的機器人相比,它的功能相對簡單。
[1]仲曉帆.基于CODESYS 的六關節機器人運動控制方法研究[D].浙江工業大學,2015.
[2]范叔炬.機械臂運動學算法設計[D].浙江大學,2008.
[3]王才東.六自由度教學機器人控制系統設計及實驗研究[D].哈爾濱工業大學,2008.
[4]張濤.機器人引論[M].機械工業出版社,2010.
[5]黃政杰.六自由度FOXBOT機械手臂動力學之探討[D].國立勤益科技大學,2011.
