Geo-Pilot旋轉導向鉆井系統現場應用分析
2018-03-27 01:02:52郭福祥高立軍
西部探礦工程 2018年3期
關鍵詞:系統
郭福祥,高立軍,宮 華
(大慶鉆探工程公司鉆井工程技術研究院,黑龍江大慶163413)
在復雜油氣藏中鉆超深井、水平井、大位移井、分支井及三維復雜結構井等特殊工藝井中推廣應用旋轉導向鉆井技術,既提高了機械鉆速,也降低了鉆井成本[1-2]。旋轉導向鉆井系統的核心是井下旋轉導向鉆井工具系統,根據其導向方式可以分為推靠式(Push the Bit)和指向式(Point the Bit)2種[3]。推靠式是在鉆頭附近直接給鉆頭提供側向力,指向式是通過近鉆頭處鉆柱的彎曲使鉆頭指向井眼軌跡控制方向。Baker?Hughes的AutoTrak旋轉閉環鉆井系統和Schlumberg?er的Power Drive調制式全旋轉導向鉆井系統屬于推靠式,Halliburton的Geo-Pilot旋轉導向自動鉆井系統屬于指向式。
1 Geo-Pilot旋轉導向系統
1.1 系統組成
Geo-Pilot是指向式的旋轉導向系統,主要由驅動軸、外殼、驅動軸密封裝置、非旋轉設備、上下軸承、偏心裝置、近鉆頭井斜傳感器、近鉆頭穩定器、控制電路等部件構成(圖1)。系統外筒裝有2個偏心環,一個位于另一個的內部,該偏心環總成組成了精細、緊湊、經久耐用的計算機控制的偏心單元,2個偏心環驅動驅動軸偏離鉆具中心,致使鉆頭產生偏斜力,從而實現全部旋轉的導向鉆進模式[4]。
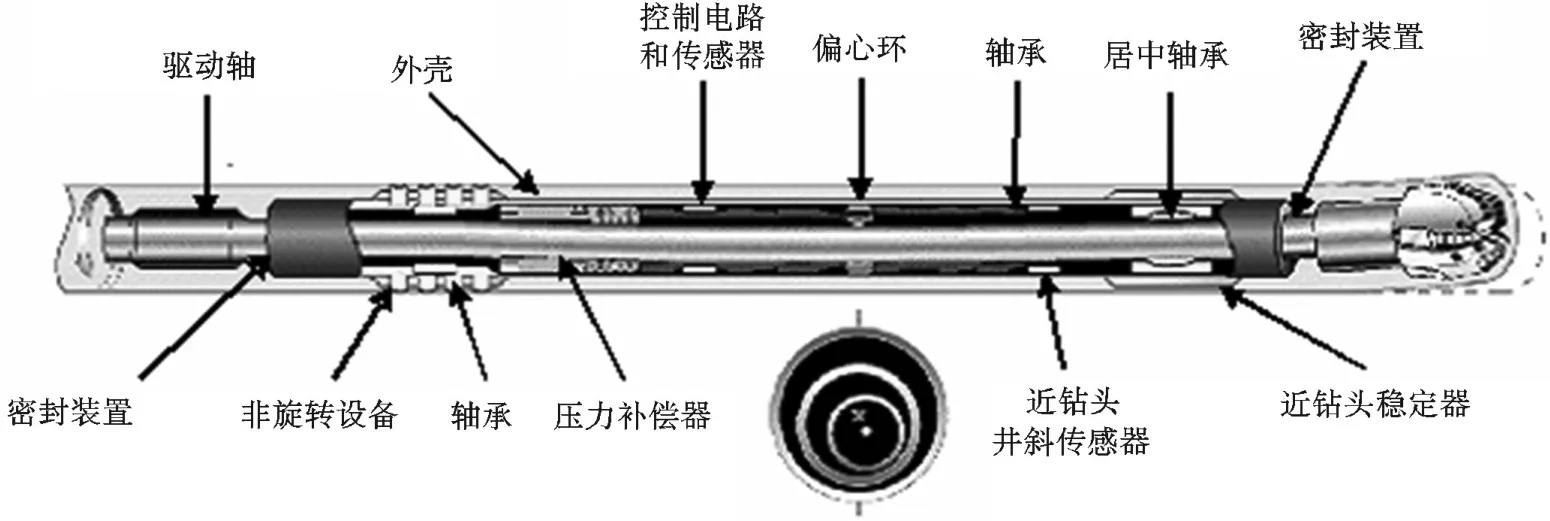
圖1 Geo-Pilot旋轉導向系統組成示意圖
1.2 工作原理
Geo-Pilot旋轉導向系統靠不旋轉外筒與驅動軸之間的偏心裝置使驅動軸彎曲,從而為鉆頭提供了一個與井眼軸線不一致的傾角,產生導向作用。Geo-Pilot旋轉導向系統的驅動軸貫穿整個系統,其兩端安裝在軸承上,上部和鉆具連接,下部和鉆頭連接,是驅動鉆頭轉動的動力傳輸裝置。系統的外殼安裝在軸承的外圍,相對地層不旋轉,以此提供一個相對穩定的工具面。外殼內部有一個傳感器組,用以測量近鉆頭井斜、方位伽馬和系統的工具面。外殼中間的偏心裝置是系統的核心部件(圖2),偏心裝置由2個獨立的偏心環組成。當2個偏心環的偏心位置正好相反時,此時驅動軸不彎曲。當2個偏心環的偏心方向一致時,此時驅動軸彎曲幅度最大(其導向能力達到最強)。2個偏心環的偏心位置不在同一直線時驅動軸的彎曲度介于彎曲幅度最大和不彎曲之間,由此控制系統不同的造斜能力。偏心裝置和井下控制軟件一起工作,自動調整2個偏心環的偏心位置,防止系統在設計工具面誤差范圍外的狀態下工作,以實現閉環控制目的[5]。
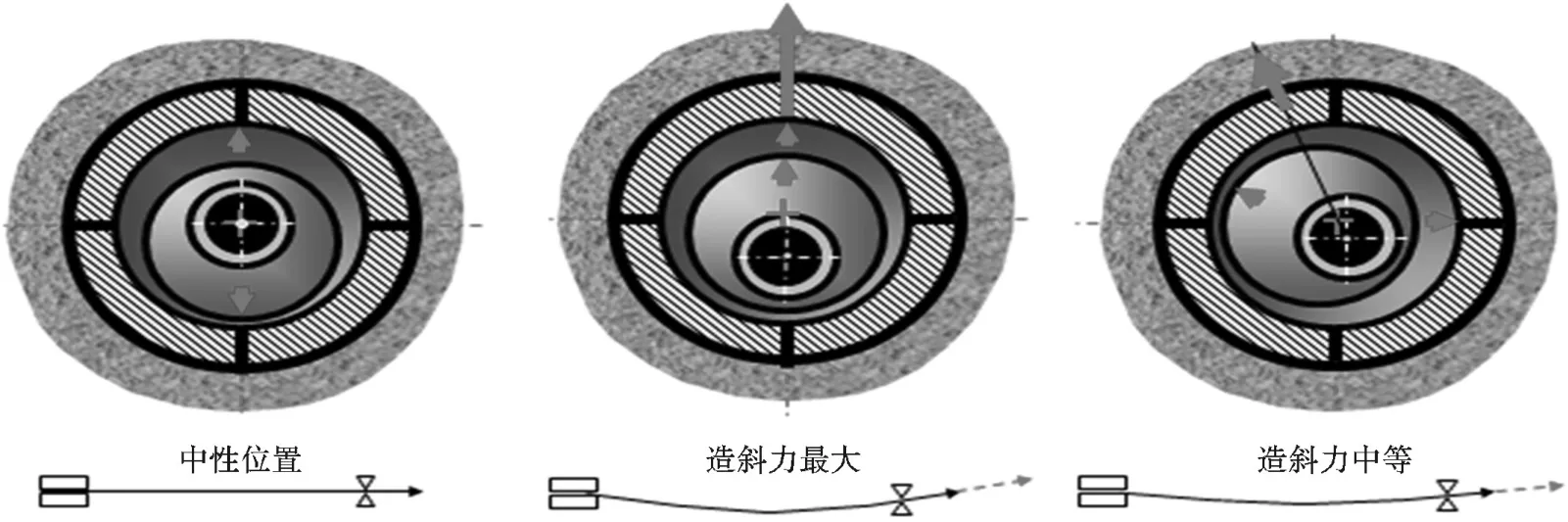
圖2 偏心環相對位置及造斜力示意圖
1.3 技術優點
(1)造斜率可靠度高,鉆進時由于外筒不旋轉,近鉆頭扶正器不磨損,工具連續造斜,保證了造斜率。
(2)摩阻低、扭矩小,指向式旋轉導向系統能鉆出較平滑的井眼,有利于降低摩阻,減小扭矩,可以使用較大的鉆壓提高機械鉆速。
(3)井眼清潔效果更好,利用該系統有利于消除井眼螺旋,最大限度地減少或避免托壓問題的發生,提高了鉆井效率。
(4)近鉆頭方位伽馬和井斜傳感器,距離鉆頭最近(距離鉆頭1m),可以實現精確控制井眼軌跡,地質導向效果更好。
2 現場應用分析
大慶油田引進的Geo-Pilot7600導向系統在6口水平井的水平段進行了現場應用,最大完鉆斜深3825m,水平段最長1321m,最大垂深2169m,最大平均機械鉆速12.83m/h,實現了在水平段應用旋轉導向工具提速、提質、提效的目的[6]。針對施工中2口井施工復雜情況(表1)的原因分析[7],對旋轉導向鉆井系統的工作特點及現場應用有了進一步認識。
2.1 J34-P2井應用情況

表1 Geo-Pilot旋轉導向系統施工復雜情況
(1)基本情況。J34-P2井表層套管下深1709m,造斜點1830m,著陸點2344m,完鉆井深3490m。
(2)卡鉆經過。鉆進至井深3162m,機械鉆速逐漸變慢,鉆速由6~7m/h降至2~4m/h,并且扭矩由15~20kN·m增大至20~25kN·m。決定起鉆檢查,在起鉆初期有卡鉆顯示,最大超拉30kN,開泵,開頂驅處理后解卡,起出鉆頭保徑有磨損,外徑214mm,決定通井。通井后再次鉆進至井深3169m,鉆壓8~10kN,扭矩17~19kN·m,摩阻15kN,頂驅轉速110r/min,機械鉆速2.7m/h,由于進尺較慢,上提2m左右后,憋停頂驅,發生卡鉆。大噸位活動鉆具,上提130~230kN,下放至40kN,反復活動,處理6h后上提230kN解卡。
(3)原因分析。通井期間無顯示,振動篩返砂增多;起出鉆具后鉆頭保徑磨損,旋導工具扶正器及支撐輪均無異常。分析原因為井底沉砂較多,環空不暢,鉆頭縮徑導致卡鉆。
2.2 ZP20井應用情況
(1)基本情況。ZP20井表層套管下深118m,技套下深1513m,造斜點1551m,著陸點2014m,完鉆井深3232m。
(2)卡鉆經過。鉆進至井深3232m甲方通知完鉆,開始循環起鉆,摩阻30~40kN,起鉆至1980m后倒劃眼至1957m,扭矩18~20kN·m,排量27~30L/s,懸重70t,上提至100~110kN,下放至40~50kN,期間頂驅偶有憋停現象,個別點出現上提和下放遇阻現象,循環暢通。起鉆至1853m,上提懸重超拉40kN,開泵后泵壓由13.4MPa上升至17.7MPa,扭矩由9.26kN·m上升至20.78kN·m,發生卡鉆。處理35h后泡油上提至170kN解卡。
(3)原因分析。解卡后循環鉆井液,振動篩返出大量巖屑,青山口組屬不穩定地層,井壁坍塌導致卡鉆。
2.3 改進技術措施
2.3.1 優化軌跡設計,精確軌跡控制
造斜段是水平井施工的關鍵,施工前根據直井段的位移偏差對井眼軌跡進行優化,選擇造斜率最低、摩阻和扭矩最小、施工效率最高的井眼軌跡剖面[8]。原則上設計造斜率不得超過6.5°/30m,實際最大狗腿度不得超過設計的30%,連續3點實際狗腿度不能同時超過8°/30m,下入旋轉導向工具前30m的狗腿度小于5°/30m,利于旋轉導向工具下一步施工。
水平段施工要以提高砂巖鉆遇率,實現水平段的有效延伸為目的,以旋轉導向工具不產生較大震動為原則,水平段最大井斜角不超過92°,狗腿度連續3點不超過3°/30m。現場施工人員要根據近鉆頭井斜及隨鉆曲線的變化,對軌跡及時調整,做到精細控制,同時要根據井下震動及扭矩的變化,對施工參數進行優選,保證實鉆井眼軌跡光滑,降低施工的摩阻和扭矩,避免井下復雜發生[9]。
2.3.2 降低鉆具剛性,優化鉆具組合
為盡可能降低鉆具的剛性強度,保證鉆具在井下的通過能力,將無磁鉆鋌改造為柔性短節,并進行抗壓、抗扭、抗拉強度校核以及剛度校核對比(表2),表明自研柔性短節滿足柔性短節鉆具性能要求,鉆具剛度較無磁鉆鋌大大降低,既能提高井下工具的安全性,又能保證測量數據的準確性[10]。
對于215.9mm井眼,應選用5刀翼及以上的PDC鉆頭,以減小儀器在井下震動。同時要確保鉆頭保徑良好,避免小井眼卡鉆、影響鉆進速度或損壞旋轉導向工具。通過現場應用和理論分析建立如下鉆具組合:?215.9mmPDC鉆頭+?193mmRSS+?172mm(PCD柔性短節)+?172mmLWD+?172mmPCM短節+?172mm浮閥+?127mm加重鉆桿×3根+?165mm震擊器+?127mm加重鉆桿×3根+?127mm鉆桿。
2.3.3 提高鉆井液性能,保證井眼暢通
針對水平井裸眼井段長、摩阻扭矩大、井壁容易垮塌、巖屑攜帶困難等施工難點,優選具有強抑制性、封堵性和潤滑性的高性能水基鉆井液體系。主要采取以下技術措施保證井眼暢通:
(1)鉆進過程中保證鉆井液排量在32L/s以上,鉆井液的動塑比3%~5%,粘度小于75s,提高攜巖能力。
(2)調整鉆井液流變性能,使用振動篩目不小于120目,保證四級固控設備運轉正常,及時清除有害固相和鉆井液中的巖屑。
(3)每鉆完一個單根至少正、倒劃眼一次,每鉆完一柱再進行正、倒劃眼一次,同時根據施工摩阻和扭矩情況,實時進行短起下鉆破壞巖屑床,保證井下安全。

表2 無磁鉆鋌與柔性短節性能對比表
3 應用效果
X38-P1井設計斜深3431.00m,垂深1834.93m,最大井 斜角 92.02°,網 格 方 位 350.69°,水平 位移1814.65m,水平段長1321.00m。按油藏方案要求,為了保證水平段的砂巖鉆遇率,實現水平段的有效延伸,水平段使用改進后的Geo-Pilot旋轉導向工具,采取有效的技術措施,從著陸點2120m下入旋轉導向工具,鉆進至設計井深3431m完鉆,全井未出現任何井下復雜事故,應用效果良好。
(1)機械鉆速明顯提高,降低了鉆井成本。應用旋轉導向系統,在鉆進過程中可以隨時監測井下工具的工作狀態,通過優選鉆井參數,可以最大程度地提高機械鉆速,水平段平均機械鉆速12.83m/h,縮短了施工周期,鉆井成本大幅度減少。
(2)井眼軌跡圓滑,摩阻扭矩降低,避免了井下復雜事故。與常規螺桿鉆具滑動鉆進相比,使用旋轉導向工具鉆成的井眼軌跡圓滑,摩阻扭矩明顯減少,實鉆與設計井眼軌跡吻合程度高,水平段全角變化率最大1.78°/30m,避免了井下復雜事故的發生。
(3)水平段控制精度高,有效鉆遇目的油層。旋轉地質導向工具不僅能夠在旋轉的條件下對井斜和方位進行調整,還擁有近鉆頭伽馬和電阻率,能夠及時發現儲層的變化。X38-P1井水平段設計與實鉆軌跡數據對比見表3,實鉆軌跡與設計軌跡吻合較好,實鉆水平段長1311m,砂巖有效鉆遇率87%。

表3 X38-P1井設計與實鉆軌跡數據對比表
4 結論與認識
(1)通過Geo-Pilot旋轉導向應用技術攻關與實踐,初步形成了適應大慶油田水平井特點的井身結構設計,井眼軌跡優化與精確控制,鉆井參數優選與鉆具組合優化等旋轉導向配套技術,提高了水平井井身質量與鉆井效率,降低了旋轉導向工具施工風險。
(2)應用旋轉導向鉆井技術鉆出的井眼軌跡圓滑,利用近鉆頭伽馬和電阻率傳感器,為準確鉆遇目的層,實現水平段的有效延伸提供了技術保障,進一步提高了水平井的單井產量,為油田開發創造了良好的經濟效益和社會效益。
(3)Geo-Pilot旋轉導向系統的引進與應用,為國內旋轉導向工具的研發和改進提供了技術依據,可借鑒世界先進技術,研制具有自主知識產權的、成熟的旋轉導向鉆井系統。
[1] 肖仕紅,梁政.旋轉導向鉆井技術發展現狀及展望[J].石油機械,2006,34(4):66-70.
[2] 薛啟龍,丁青山,黃蕾蕾,等.旋轉導向鉆井技術最新進展及發展趨勢[J].石油機械,2013,41(7):1-7.
[3] 趙金洲,孫銘新.旋轉導向鉆井系統的工作方式分[J].石油機械,2004,32(6):73-75.
[4] 付天明.Geo-Pilot旋轉導向系統發展與應用研究[J].石油礦場機械,2014,43(5):77-80.
[5] 雷靜,楊甘生,梁濤,等.國內外旋轉導向鉆井系統導向原理[J].探礦工程(巖土鉆掘工程),2012,39(9):53-58.
[6] 張曉廣,邵明仁,傅文偉,等.Geo-Pilot旋轉導向鉆井系統在水平分支井中的應用[J].海洋石油,2013,33(1):92-95.
[7] 李東立.水平井事故的預防措施[J].內蒙古石油化工,2007,9(4):57-58.
[8] 李增科,趙哲.旋轉導向鉆井技術的應用及探討[J].江漢石油職工大學學報,2015,28(2):25-27.
[9] 顧戰宇,熊偉,楊仕會,等.旋轉導向鉆井技術在HJ203H井的應用[J].西部探礦工程,2010,11(4):125-128.
[10] 狄勤豐,王明杰,胡以寶,等.柔性短節位置對帶旋轉導向工具底部鉆具組合動力學特性的影響[J].中國石油大學學報:自然科學版,2012,36(5):84-88.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32