基于Proteus的無刷電機系統仿真研究
2018-03-30 02:26:56王偉石歡歡劉海強時洋洋
電子技術與軟件工程 2017年16期
王偉 石歡歡 劉海強 時洋洋
摘要
本文介紹了無刷直流電機(Brushless DC Motor,BLDCM)的工作原理,分析了其換相邏輯,對電機系統在Proteus環境下進行了建模和調試,在此基礎上對電機開環系統的工作性能進行了仿真和分析,并著重設計和實現了基于Arduino單片機的轉速閉環系統。通過仿真結果,驗證了該電機具有良好性能,控制系統設計合理,具有可行性。
【關鍵詞】無刷直流電機 Proteus PID算法
目前,工業上常用的電力拖動系統包括同步電動機、異步電動機、有刷直流電動機、無刷直流電動機等,其中交流機占主導地位,特別是異步電動機。但在有些領域上,異步電動機暴露了其自身功率因數滯后,輕載功率因數低,調速性能稍差等缺點。因此在調速性能要求較高的大型設備如乳鋼機,都采用有刷直流電動機拖動,但其存在著直流換向問題,結構復雜且不方便維護維修。近年來無刷直流電動機及其控制技術發展迅猛,有效地解決了有刷直流電機的主要缺陷。無刷直流電動機取消了普通直流電電機的滑環、碳刷結構,繞組多采用三相星形接法,轉子為永磁體,并具有檢測轉子位置的霍爾傳感器。電機具有直流電動機的所有優點,并具有體積小、重量輕、出力大、結構簡單、響應快、啟動轉矩大、轉矩恒定等諸多優點。因此,BLDCM以其卓越性能,在越來越多的拖動和伺服控制場合替代現有的直流調速電機、變頻電機、以及異步電機等,成為性價比最高的選擇。
Proteus是英國Labbcenter公司開發的電路分析與仿真軟件,可以分析各種模擬器件和集成電路,具有模擬電路、數字電路仿真、單片機及外圍電路仿真功能。
1 BLDCM工作原理
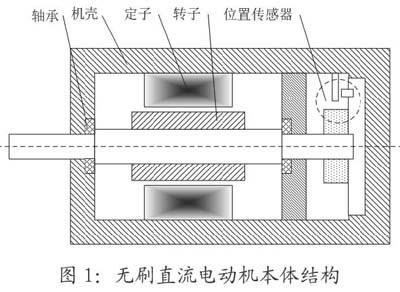
無刷直流電動機作為一種典型機電一體化產品,由電機本體、逆變電路、控制器、及位置傳感器組成的電動機系統。控制器通過對位置傳感器檢測出的轉子磁極位置信號進行邏輯整合后可以得到逆變電路各功率開關管相應的觸發信號,從而使電源功率按邏輯分配給各相定子繞組,電機產生順向電磁轉矩。
無刷直流電機本體結構如圖1所示。
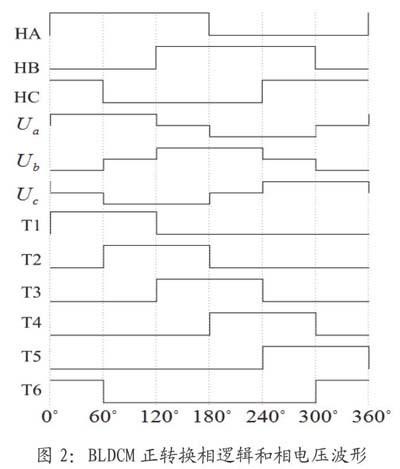
每次換相過程中,電機三相繞組中會有一相繞組接電源正,另一相繞組接負,第三相繞組失電,繞組電流從接正端流入,接負端流出。通電的定子繞組會產生磁場,該磁場與轉子永磁體互相作用會產生電磁轉矩。理想狀態下,電磁轉矩峰值出現兩個磁場正交時,而在兩磁場平行時最弱,轉子會向著與定子磁場方向平行的方向轉動。因此,當定子繞組產生的磁場不斷變換位置時,轉子會受到順向磁拉力的作用,從而實現固定方向的旋轉運動。霍爾位置傳感器信號(HA、HB、HC),通過改變逆變器功率開關管的導通順序,可實現電機正轉(順時針)或反轉(逆時針)。BLDCM正轉時,在一個360°的通電周期內,霍爾信號HA、HB、HC與逆變器功率器件(T1?T6)之間的換相邏輯和對應的三相繞組相電壓(Ua、Ub、Uc)波形如圖2所示。電機反轉時,情況類似推理。
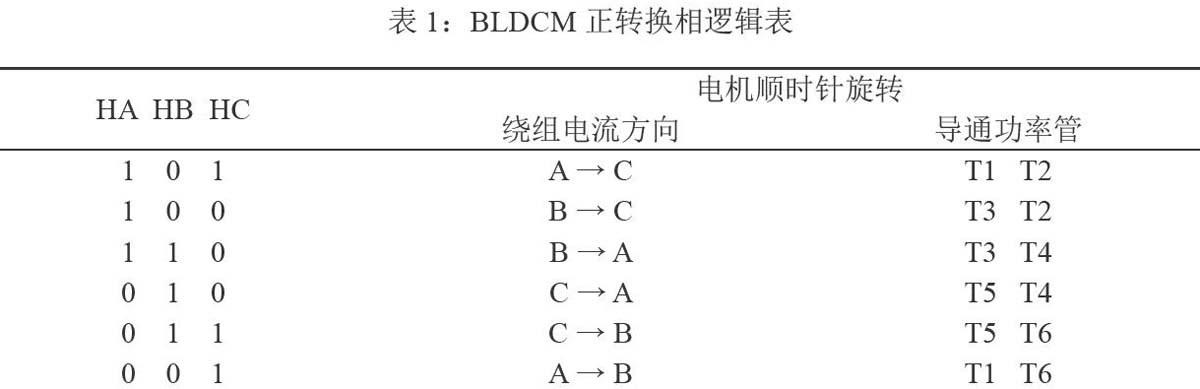
表1給出了Y連接兩相導通三相六狀態無刷直流電機正/反轉時的換相邏輯關系和繞組電流方向。
當電機正轉時,六只功率管的導通順序是:Tl、T2→T3、T2→T3、T4→T5、T3→T5、T6→Tl、T6,依次循環。在電機正轉,功率管Tl、T2導通時,電流從直流電源正極開始,依次流過T1管、A相繞組和C相繞組,并經T2管流回電源地,其他功率管導通時情況類似。因此,根據上述邏輯關系可以得到各開關管的控制邏輯表達式如下式(1)所示。
2 開環系統建模與仿真
根據無刷直流電機工作原理,在Proteus環境里對無刷直流電機開環系統進行仿真。Mechanical器件庫支持星形連接、三角形連接方式,本文采用星形連接方式的無刷直流電機BLDC-STAR。
根據電機仿真參數,電源選擇24VDC,主功率電路中的功率開關管選用型號為IRF540的MOSFET。電機霍爾傳感器輸出信號為HA、HB、HC,根據公式(1)采用與門、非門對霍爾信號進行邏輯運算,將運算結果T1?T6分別接MOS管的門極,得到BLDCM開環仿真模型如圖3所示。
運行系統,得到電機開環轉速和相電流波形圖如圖4、5所示。根據圖4仿真波形可知,電機的開環額定轉速為730r/min,系統穩態響應良好;電機起動時間和起動轉速超調在可接受范圍內且穩態轉速波動較小,系統動態性能較好。
由圖5仿真波形可知,電機的電流穩態波形良好,波動較小且毛刺較少,啟動過程也基本平穩。
根據仿真結果可知,該電機的穩態和動態性能良好,可滿足一般運動控制系統要求。
3 閉環系統建模與仿真
BLDCM閉環控制系統需要用到模擬量采集,外部中斷計數,PWM輸出功能,主控芯片選擇了Arduino單片機。Arduino是一款使用AtmelAVR單片機的開放性單芯片控制器,片上含有豐富的資源,具有輸入捕獲、輸出比較、PWM模式、串行UART通信等功能,支持內置數模轉換ADC。閉環控制還需要用到脈沖寬度調制技術(Pulse Width Modulation,PWM),將模擬給定信號轉換為周期固定,占空比依模擬信號大小而變化的數字控制信號。
BLDCM有多種斬波方式,此處采用“PWM-ON”方式或“上斬下不斬”方式,即逆變橋上橋臂的三個開關管采用PWM斬波,下橋臂采用正常導通方式。利用Ardino的109口產生PWM信號,將其與控制信號Tl、T3、T5相與,從而實現電機轉速閉環控制,仿真模型如圖6所示。
針對于電機調速,我們采用比例積分的方式調節:
在程序中e(k)是預設速度值與實際速度值得偏差,積分項e(k-l)是本次速度偏差與上次速度偏差的差值。
在Proteus中實現的關鍵程序如下:
其中,給定值SetPoint是電位器分壓經AD轉換后的值,原參數范圍是0?1024之間,在仿真中我們對其進行映射為轉速0?600r/min,Pulse為仿真中實際電機轉速。
程序運算輸出值關鍵在于確定Kp與Ki,首先確定Kp的值,先不加積分環節,比較不同Kp值對電機轉速的影響,依照超調量不能過大、響應時間不能過長的原則確定Kp值取值范圍,之后加上積分環節,調節Ki值,確定最佳的Kp和Ki值。
經調試,Kp值設置為0.3,Ki值設置為0.15,電機響應效果最佳。如圖7所示的是在此控制參數下,給定轉速為300時,電機實際轉速波形。分析仿真波形可知,閉環系統中,電機轉速從0開始逐漸爬升并逐步穩定到給定轉速300r/min,在此過程中,存在一定超調量,調節時間相對較短,系統具有良好的轉速閉環特性,穩態和動態性能良好。
4 結論
本文對無刷直流電動機的工作原理、運行方式以及閉環調速系統進行了分析,并在Proteus中對系統進行了開環控制和閉環調速仿真。經驗證,系統具有良好穩態和動態性能,適合用于運動伺服控制系統。通過分析總結無刷直流電動機調速系統的工作方式、調速方法及可能遇到的問題,為下一步進行實物設計打下了基礎。
參考文獻
[1]朱杰.基于PIC16F1933的無刷直流電機控制器的研究與實現[J].科技風,2013,24(10):40-42.
[2]林明耀,陳華鋒等.永磁無刷直流電動機的控制技術研究綜述[J].機械制造與自動化,2016,6(06):1-3.
[3]鐘煒,李澤滔.基于AT89S52單片機的電子記分牌設計[J].現代機械,2015,6(01):83-86.
[4]王林濤.BLDCM驅動的電動門控系統的研究[D].上海:上海交通大學,2008.
[5]王淑紅,熊光煜.無刷直流電動機特性有限元分析[J].微電機,2007,12(06):42-45.
[6]高輝,姚莉莉.“六步換向”法控制無刷直流電機設計[J].防爆電機,2012,6(04):3-5.