基于強(qiáng)跟蹤卡爾曼濾波的電池SOC估計*
2018-04-02 06:11:31趙亞妮
沈陽工業(yè)大學(xué)學(xué)報 2018年2期
趙亞妮
(西藏民族大學(xué) 信息工程學(xué)院, 陜西 咸陽 712082)
當(dāng)前能源危機(jī)和環(huán)境污染問題日益凸顯,新能源代替燃料緩和了能源與環(huán)境的矛盾[1-3],因此,發(fā)展新能源汽車成為汽車行業(yè)的主要趨勢.電動汽車是新能源汽車的主體,電池管理系統(tǒng)是電動汽車的重要組成部分,用于監(jiān)視電池的狀態(tài).電池荷電狀態(tài)(state of charge,SOC)作為電池管理系統(tǒng)最為關(guān)鍵的技術(shù),反映電池的剩余電量,代表汽車的續(xù)航能力,因此,研究電池SOC估計問題對駕駛員掌握續(xù)航能力,及時補(bǔ)充電量具有重要意義.
電池SOC無法直接測量,只能通過測量電池其他狀態(tài)量來間接測量.電池SOC估計的傳統(tǒng)方法有放電實驗法、按時積分法、開路電壓法及內(nèi)阻法等,放電實驗法[4]精度較高,但只適用于實驗室條件,無法應(yīng)用于汽車行駛中;按時積分法[5]簡單可靠,但對傳感器精度依賴性較強(qiáng),容易產(chǎn)生積累誤差;開路電壓法[6]只適用于電池穩(wěn)定狀態(tài),但汽車行駛過程中電池狀態(tài)突變較多;內(nèi)阻法[7]在電池放電后期估計精度較好,但是內(nèi)阻難以精確測量.電池SOC估計常用的智能算法包括神經(jīng)網(wǎng)絡(luò)算法和卡爾曼濾波,神經(jīng)網(wǎng)絡(luò)法[8]適用于所有電池,但是需要大量數(shù)據(jù)進(jìn)行訓(xùn)練;卡爾曼濾波[9]對電池模型的精確性要求較高,電池突變時此算法的估計結(jié)果極差.
尋求一種能夠時刻滿足SOC精度要求的估計方法是當(dāng)前研究的熱點.本文針對卡爾曼濾波無法跟蹤電池狀態(tài)突變的情況,結(jié)合強(qiáng)跟蹤原理提出了強(qiáng)跟蹤卡爾曼濾波方法,在電池狀態(tài)突變的情況下,此算法SOC的估計結(jié)果依然能夠滿足精度要求.
1 鋰電池建模及參數(shù)辨識
1.1 鋰電池建模
對鋰電池進(jìn)行建模要滿足兩個要求:一是能夠準(zhǔn)確模擬電池的動靜態(tài)特性;二是模型不能過于復(fù)雜,以減少運算量.常見的鋰電池等效電路模型包括理想模型、戴維南模型、PNGV模型及雙階RC模型等.理想模型只考慮電池內(nèi)阻;戴維南模型比理想模型多出并聯(lián)RC回路,模擬極化現(xiàn)象;PNGV模型在戴維南模型基礎(chǔ)上串聯(lián)了電容,反應(yīng)動態(tài)過程;雙階RC模型將電池的電化學(xué)極化和濃差極化現(xiàn)象分開等效,其在三種模型中具有最高的等效精度.文獻(xiàn)[10]已經(jīng)證明,三階RC模型相比于雙階RC模型精度變化不明顯,但模型復(fù)雜度卻顯著提高,因此,本文選用雙階RC模型,其等效電路如圖1所示.
圖1中,Uoc等效為電池的開路電壓;Ut等效為電池的端電壓;R0等效為電池的歐姆內(nèi)阻,用于反映電池的突變現(xiàn)象;RsCs回路等效電池的濃差極化,用于反映電池突變后的快速反應(yīng)過程;RdCd回路等效電池的電化學(xué)極化,用于反映電池突變后的慢速反應(yīng)過程;I為電池的內(nèi)部電流.
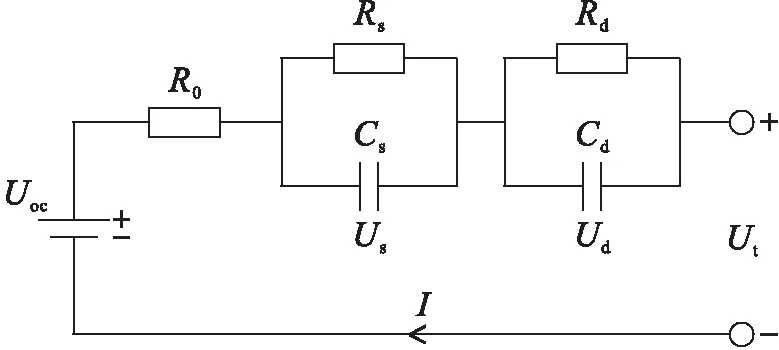
圖1 雙階RC模型Fig.1 Two-order RC model
記電池載荷狀態(tài)為qSOC,Rs端電壓為Us,Rd端電壓為Ud,選擇電池系統(tǒng)的狀態(tài)量為x=[qSOC,Us,Ud]T,則雙階RC模型的狀態(tài)方程為
(1)
式中:Qc為電池荷載量;τs、τd分別為RsCs回路、RdCd回路的時間常數(shù);初始參數(shù)為I(t0)=0 A,Us(t0)=0 V,Ud(t0)=0 V,Uoc=3.5 V.雙階RC模型的輸出方程為
Ut(t)=Uoc-Us(t)-Ud(t)-R0I(t)
(2)
1.2 模型參數(shù)辨識
首先建立開路電壓Uoc與荷電狀態(tài)qSOC的對應(yīng)關(guān)系,由于鋰電池具有滯回電壓特性,也就是其充電的開路電壓大于放電的開路電壓,因此,分別建立放電過程關(guān)系式與充電過程的關(guān)系式.以放電過程為例,在25 ℃恒溫下將電池充滿電至3.5 V后靜置2 h,而后放電1 C,放電時間為5 min,靜置5 min,將靜置期間最大電壓作為此荷電狀態(tài)的開路電壓,重復(fù)此過程直到電池電壓小于2 V,此時電池放電完畢.
對實驗所得數(shù)據(jù)進(jìn)行多項式擬合,經(jīng)擬合可知,7階模型的擬合精度比6階模型精度高一個數(shù)量級,但8階模型與7階模型精度相差較小,因此,本文使用7階模型進(jìn)行擬合,擬合曲線如圖2所示.由圖2可以看出,放電曲線與充電曲線差距相差較小,故選用其均值曲線作為最終結(jié)果,最終得到的均值曲線表達(dá)式為
由圖1可以看出,需要辨識的模型參數(shù)包括R0、Rs、Rd、Cs、Cd,由于電池在不同qSOC下模型參數(shù)值不同,因此,qSOC每間隔10%進(jìn)行參數(shù)辨識.充電和放電時模型參數(shù)不一致,因此,需要對充電和放電過程分別進(jìn)行辨識.本文使用HPPC測試方法[11],具體測試方法為放電10 s,放電電流為3.7 A,而后靜置40 s,再以2.8 A電流充電10 s.qSOC每間隔10%測試時,電池需靜置30 min,測試結(jié)果如表1、2所示.由表1、2可知,該模型在不同的qSOC時需要不同模型參數(shù),以保證近100%的精度.但考慮不同科學(xué)研究與工業(yè)測試具有一定的可容忍誤差,為此可采用平均值作為模型參數(shù)實現(xiàn)通用性與可移植性.
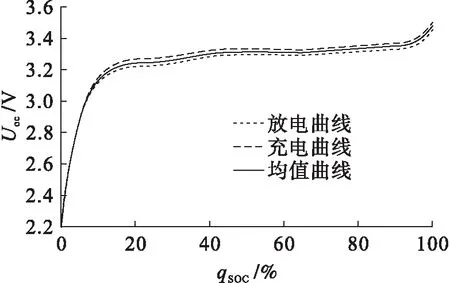
圖2 Uoc-qSOC擬合曲線Fig.2 Uoc-qSOC fitting curves
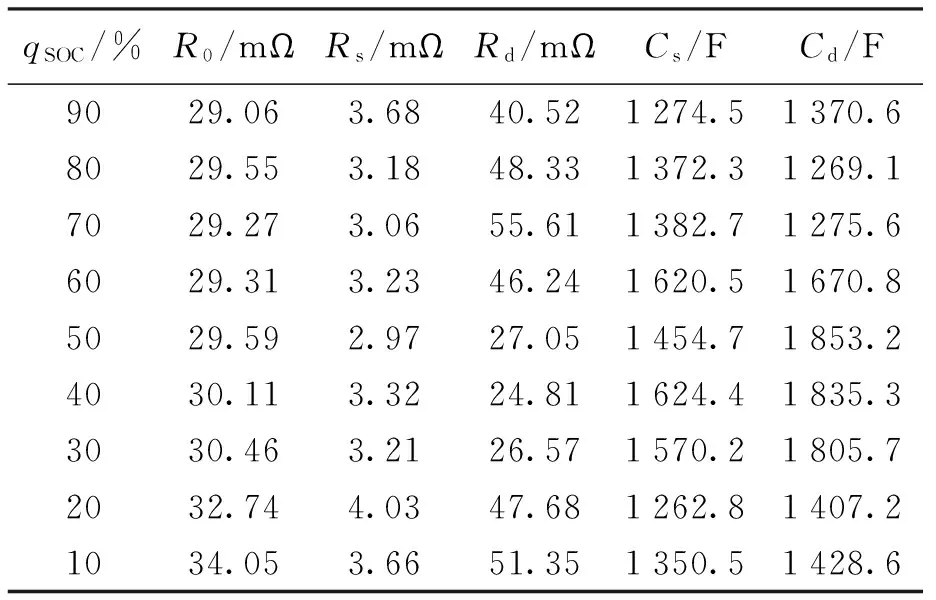
表1 放電過程模型參數(shù)Tab.1 Model parameters for discharge process
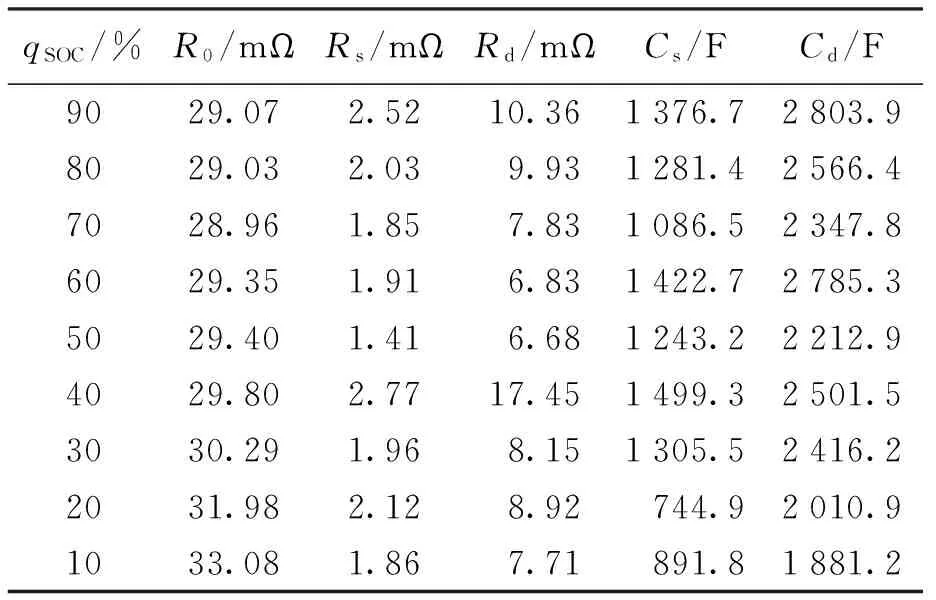
表2 充電過程模型參數(shù)Tab.2 Model parameters for charging process
2 強(qiáng)跟蹤卡爾曼濾波器
2.1 擴(kuò)展卡爾曼濾波
標(biāo)準(zhǔn)卡爾曼濾波只適用于線性系統(tǒng),但鋰電池在使用過程中是嚴(yán)重的非線性系統(tǒng),因此,本文使用擴(kuò)展卡爾曼濾波[12-17]對鋰電池系統(tǒng)狀態(tài)進(jìn)行估計.擴(kuò)展卡爾曼濾波就是將非線性系統(tǒng)進(jìn)行泰勒級數(shù)展開,保留其中的零次項和一次項,省略高次項,從而將非線性系統(tǒng)近似為線性系統(tǒng).非線性系統(tǒng)的狀態(tài)空間方程和觀測方程為
(3)

(4)
(5)
對線性系統(tǒng)式(5)使用卡爾曼濾波方程就實現(xiàn)了擴(kuò)展卡爾曼濾波,具體實現(xiàn)過程中各表達(dá)式表述為:
2) 誤差協(xié)方差矩陣,Pk=Ak-1Pk-1Ak-1+Qk-1,其中,Qk-1為誤差矩陣;
5) 誤差協(xié)方差陣更新,Pk+1=(I-LkCk)Pk.
按上述5個步驟進(jìn)行反復(fù)迭代,便可實現(xiàn)系統(tǒng)狀態(tài)的最優(yōu)估計.
2.2 強(qiáng)跟蹤卡爾曼濾波器設(shè)計
使用擴(kuò)展卡爾曼濾波算法對鋰電池系統(tǒng)狀態(tài)進(jìn)行估計存在以下問題:
1) 非線性系統(tǒng)進(jìn)行線性化時會產(chǎn)生較大的近似誤差;
2) 系統(tǒng)參數(shù)發(fā)生變化時,會產(chǎn)生系統(tǒng)模型不準(zhǔn)確問題;
3) 系統(tǒng)在平穩(wěn)狀態(tài)下,卡爾曼增益矩陣會趨于較小值,而鋰電池在使用過程中會發(fā)生狀態(tài)突變,增益矩陣無法產(chǎn)生相應(yīng)變化跟蹤這一突變,從而產(chǎn)生較大估計誤差.
為了解決這些問題,本文提出了強(qiáng)跟蹤卡爾曼濾波算法,引入時變漸消因子,強(qiáng)行使殘差序列保持正交,提高模型的魯棒性,從而提升電池系統(tǒng)狀態(tài)估計的精度.
對于式(3)所給的非線性系統(tǒng),設(shè)計的強(qiáng)跟蹤卡爾曼濾波器為
(6)

為了實現(xiàn)濾波器的強(qiáng)跟蹤特性,在確定增益矩陣Lk時,需要使其滿足
(7)
式(7)的含義為:當(dāng)模型不準(zhǔn)確時,狀態(tài)估計值與實際值差別較大,通過在線確定增益矩陣Lk,使式(7)成立,也就是使殘差相互正交保持高斯特性,并時刻保持對系統(tǒng)的精確跟蹤;若系統(tǒng)模型準(zhǔn)確,式(7)就會自然成立,此時強(qiáng)跟蹤卡爾曼濾波退化為擴(kuò)展卡爾曼濾波.
2.3 強(qiáng)跟蹤卡爾曼濾波實現(xiàn)
實現(xiàn)卡爾曼濾波算法的前跟蹤特性,基本思想是通過引入漸消因子逐漸減小老數(shù)據(jù)對估計值的權(quán)重,對擴(kuò)展卡爾曼濾波的誤差協(xié)方差矩陣改進(jìn)為
Pk=λkAk-1Pk-1Ak-1+Qk-1
(8)
式中,λk為時變漸消因子,且λk≥1.
使用式(7)給出的正交原理求解漸消因子時,需要使用梯度方法.此方法使用非線性規(guī)劃求解最優(yōu)漸消因子,計算量過大,無法實現(xiàn)在線計算,因此,文獻(xiàn)[18]給出次優(yōu)漸消因子的計算方法,即
(9)
式中,ek=tr(Nk)/tr(Mk).其中的Nk,Mk定義為
(10)
結(jié)合式(1)、(2)給出的鋰電池系統(tǒng)狀態(tài)空間方程描述,得到離散化的狀態(tài)空間模型為
(11)
式中:
Dk=diag(1,exp(-Δt/τs),exp(-Δt/τd))
Bk= [-Δt/Qc,Rs(1-exp(-Δt/τs)),
Rs(1-exp(-Δt/τd))]T
基于以上分析,強(qiáng)跟蹤卡爾曼濾波算法的電池qSOC估計具體表述為:
3) 誤差協(xié)方差矩陣,Pk=λkAk-1Pk-1Ak-1+Qk-1;
6) 誤差協(xié)方差陣更新,Pk+1=(I-LkCk)Pk.
按上述6個步驟進(jìn)行反復(fù)迭代,便可實現(xiàn)對鋰電池系統(tǒng)狀態(tài)的強(qiáng)跟蹤最優(yōu)估計.
3 仿真實驗設(shè)計
首先給出算法的參數(shù)和初值,ρ=0.95,β=1.2,x0=[40%,0,0]T,P0=I3×3,Q=diag(0.001,0.1,0.1).
為了驗證算法對系統(tǒng)模型不準(zhǔn)確和狀態(tài)突變的強(qiáng)跟蹤能力,本文在開路電壓中加入均值為0.01,方差為0.1的隨機(jī)噪聲,并設(shè)計了帶有電流突變的脈沖充放電實驗.實驗的數(shù)據(jù)采集頻率為1 Hz,共采集了8 320個數(shù)據(jù)點,采集結(jié)果如圖3所示.
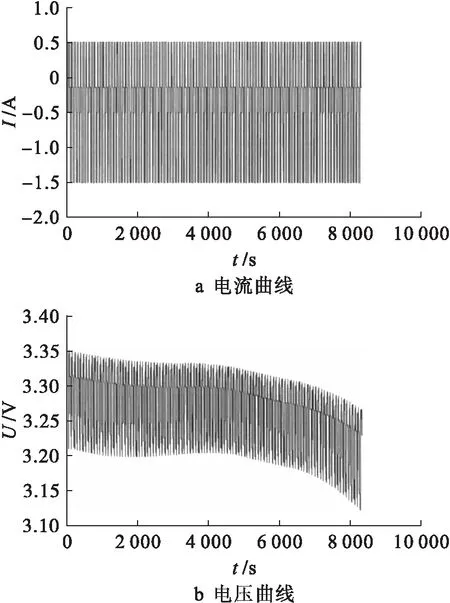
圖3 數(shù)據(jù)采集結(jié)果Fig.3 Data acquisition results
根據(jù)Uoc-qSOC關(guān)系式可知,電池qSOC初值為80.5%,但為了驗證算法對初始誤差的反應(yīng)速度,將qSOC初值設(shè)置為80%,分別使用擴(kuò)展卡爾曼濾波和強(qiáng)跟蹤卡爾曼濾波對電池qSOC進(jìn)行估計,其結(jié)果如圖4所示.
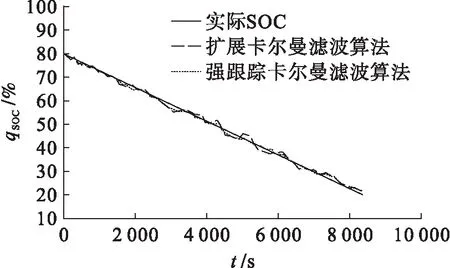
圖4 兩種算法的電池SOC估計結(jié)果Fig.4 Battery SOC estimation results of two algorithms
為了觀察兩算法對初始誤差的修正能力,對前50個數(shù)據(jù)進(jìn)行局部放大,結(jié)果如圖5所示.
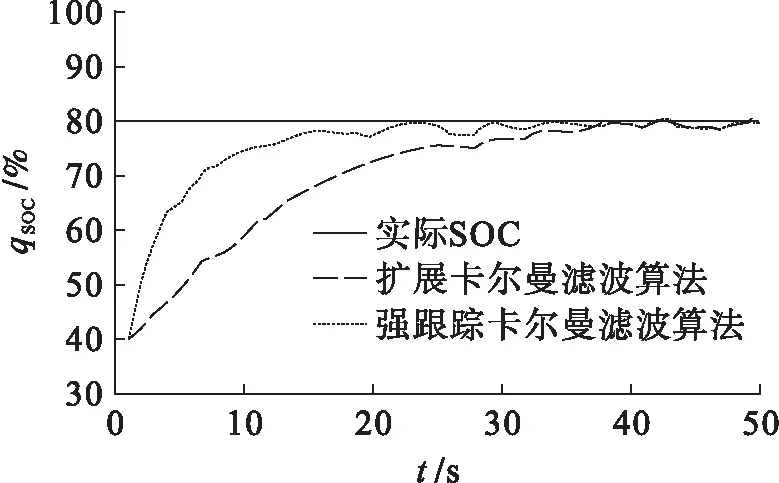
圖5 前50個數(shù)據(jù)放大圖Fig.5 Enlarged diagram for ahead 50 data
從圖5中可以看出,兩種算法最終均可收斂到真值,但強(qiáng)跟蹤卡爾曼濾波算法在20 s時就實現(xiàn)了真值跟蹤,而擴(kuò)展卡爾曼濾波在40 s時才收斂到真值,這充分說明了強(qiáng)跟蹤卡爾曼濾波比擴(kuò)展卡爾曼濾波具有更快的收斂速度與強(qiáng)跟蹤特性.兩種算法的估計誤差曲線如圖6所示.
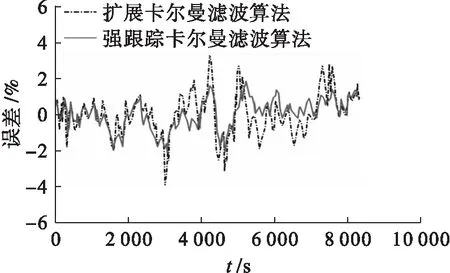
圖6 估計誤差曲線對比Fig.6 Comparison in estimation error curves
由圖6可以看出,在系統(tǒng)模型不準(zhǔn)確和帶有電流突變的情況下,強(qiáng)跟蹤卡爾曼濾波的估計誤差維持在2.5%之內(nèi);而擴(kuò)展卡爾曼濾波的最大估計誤差達(dá)到了4%.這是因為強(qiáng)跟蹤卡爾曼濾波通過調(diào)整增益矩陣,使殘差強(qiáng)行滿足正交特性,殘差變?yōu)楦咚拱自肼?這樣既提高了算法的估計精度,又使算法快速向真值靠近,提升了算法收斂速度和突變跟蹤能力.通過對比可以看出,在系統(tǒng)模型不準(zhǔn)確和狀態(tài)突變的情況下,本文提出的強(qiáng)跟蹤卡爾曼濾波具有較高的估計精度.
4 結(jié) 論
經(jīng)過以上分析,本文得出以下結(jié)論:
1) 雙階RC模型可更好模擬鋰電池內(nèi)部充放電過程,具有較高的建模精度;
2) 通過調(diào)節(jié)卡爾曼濾波增益,使殘差具有高斯白噪聲特性,提高了算法估計精度,減少了算法收斂時間;
3) 強(qiáng)跟蹤卡爾曼濾波算法在應(yīng)對狀態(tài)突變和模型不準(zhǔn)確等情況時,具有較高的估計精度.
[1] 齊仁龍,朱小會,張慶輝.光伏發(fā)電系統(tǒng)暫態(tài)特性仿真 [J].沈陽工業(yè)大學(xué)學(xué)報,2017,39(2):121-126.
(QI Ren-long,ZHU Xiao-hui,ZHANG Qing-hui.Simulation for transient characteristics of photovoltaic power generation system [J].Journal of Shenyang University of Technology,2017,39(2):121-126.)
[2] 涂濤,鐘其水,李波.鋰電池荷電狀態(tài)估算Matlab仿真研究 [J].電子設(shè)計工程,2016,24(20): 129-132.
(TU Tao,ZHONG Qi-shui,LI Bo.The Matlab simulation research for the SOC estimation of lithium-ion battery [J].Electronic Design Engineering,2016,24(20): 129-132.)
[3] 楊春生,牛紅濤,隋良紅,等.基于貝葉斯正則化算法BP神經(jīng)網(wǎng)絡(luò)釩電池SOC預(yù)測 [J].現(xiàn)代電子技術(shù),2016,39(8): 158-161.
(YANG Chun-sheng,NIU Hong-tao,SUI Liang-hong,et al.Application of BP neural network improved by Bayesian regularization algorithm in VRB SOC prediction [J].Modern Electronics Technique,2016,39(8): 158-161.)
[4] 付浪,杜明星,劉斌,等.基于開路電壓法與卡爾曼濾波法相結(jié)合的鋰離子電池SOC估算 [J].天津理工大學(xué)學(xué)報,2015,31(6):9-13.
(FU Lang,DU Ming-xing,LIU Bin,et al.Estimation of lithium-ion battery SOC based on combination of open-circuit voltage and Kalman filter [J].Journal of Tianjin University of Technology,2015,31(6):9-13.)
[5] 鮑慧,于洋.基于安時積分法的電池SOC估算誤差校正 [J].計算機(jī)仿真,2013,30(11):148-151.
(BAO Hui,YU Yang.State of charge estimation calibration based on ampere-hour method [J].Computer Simulation,2013,30(11):148-151.)
[6] 吳明澤.“開路電壓法”電動汽車電池電量計算與行駛里程預(yù)測 [D].成都:電子科技大學(xué),2013.
(WU Ming-ze.“The open circuit voltage method” electric vehicle battery mileage calculation and prediction [D].Chengdu:University of Electronic Science and Technology of China,2013.)
[7] 易明亮.基于內(nèi)阻法的電池健康狀態(tài)估計技術(shù)研究 [D].杭州:杭州電子科技大學(xué),2012.
(YI Ming-liang.The technology research of battery health state estimation method based on the internal resistance [D].Hangzhou:Hangzhou Dianzi University,2012.)
[8] 黃耀波,唐海定,章歡,等.基于遺傳神經(jīng)網(wǎng)絡(luò)的電動汽車鋰電池SOC預(yù)測 [J].機(jī)電工程,2013,30(10):1255-1258.
(HUANG Yao-bo,TANG Hai-ding,ZHANG Huan,et al.Prediction of lithium-ion battery SOC in EV based on genetic neural network [J].Journal of Mechanical & Electrical Engineering,2013,30(10):1255-1258.)
[9] 韓忠華,劉珊珊,石剛,等.基于擴(kuò)展卡爾曼神經(jīng)網(wǎng)絡(luò)算法估計電池SOC [J].電子技術(shù)應(yīng)用,2016,42(7):76-78.
(HAN Zhong-hua,LIU Shan-shan,SHI Gang,et al.Estimation of battery SOC based on extended Kalman filter with neural network algorithms [J].Application of Electronic Technique,2016,42(7):76-78.)
[10]Zhang H,Chow M Y.Comprehensive dynamic battery modeling for PHEV applications[C]//Power and Energy Society General Meeting.California,USA,2010:1-6.
[11]周武生.電動汽車磷酸鐵鋰電池建模及荷電狀態(tài)估計研究 [D].南昌:南昌航空大學(xué),2015.
(ZHOU Wu-sheng.Research on modeling and SOC estimation for LIFEPO4 battery of electric vehicle [D].Nanchang:Nanchang Hangkong University,2015.)
[12]劉浩.基于EKF的電動汽車用鋰離子電池SOC估算方法研究 [D].北京:北京交通大學(xué),2010.
(LIU Hao.Study on SOC estimation method of lithium-ion battery based on EKF for electric vehicles [D].Beijing:Beijing Jiaotong University,2010.)
[13]王長清,朱敏.基于復(fù)合EKF算法的鋰電池組的SOC估計 [J].電源技術(shù),2015,39(2):285-286.
(WANG Chang-qing,ZHU Min.A new estimation method of li-batteries SOC based on composite EKF [J].Chinese Journal of Power Sources,2015,39(2):285-286.)
[14]張娟.基于遠(yuǎn)程監(jiān)控系統(tǒng)的純電動汽車鋰離子電池SOC估算算法研究 [D].長春:吉林大學(xué),2014.
(ZHANG Juan.Study on SOC estimation algorithm of lithium-ion battery based on remote monitoring system for pure electric vehicle [D].Changchun:Jilin University,2014.)
[15]馮光.基于EKF的鋰離子電池SOC估算的建模與仿真 [D].武漢:武漢理工大學(xué),2013.
(FENG Guang.Modeling and simulation based on EKF lithium-ion battery SOC estimation [D].Wuhan:Wuhan University of Technology,2013.)
[16]胡新宇,張鋒,王博思,等.基于EKF的18650鋰電池SOC在線估算 [J].激光雜志,2016,37(5):72-75.
(HU Xin-yu,ZHANG Feng,WANG Bo-si,et al.On-line estimation of 18650 lithium battery SOC based on extended Kalman filtering [J].Laser Journal,2016,37(5):72-75.)
[17]榮雅君,楊偉,牛歡,等.基于BP-EKF算法的電動汽車電池管理系統(tǒng)SOC精準(zhǔn)估計 [J].電工電能新技術(shù),2015,34(9):22-28.
(RONG Ya-jun,YANG Wei,NIU Huan,et al.Accurate estimation of SOC value of electric vehicle battery based on EKF algorithm optimized by BP neural network [J].Advanced Technology of Electrical Engineering and Energy,2015,34(9):22-28.)
[18]陳林,張持健,殷安龍,等.基于LabVIEW的鋰電池監(jiān)測系統(tǒng)及SOC預(yù)測研究 [J].電子設(shè)計工程,2016,24(15): 73-75.
(CHEN Lin,ZHANG Chi-jian,YIN An-long,et al.Lithium battery monitoring system based on LabVIEW and research on the prediction of SOC [J].Electronic Design Engineering,2016,24(15): 73-75.)
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
工業(yè)設(shè)計(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(2020年2期)2020-06-02 11:29:24
北京航空航天大學(xué)學(xué)報(2017年9期)2017-12-18 07:12:25
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
電源技術(shù)(2016年9期)2016-02-27 09:05:39