鐵路大修列車液壓行走驅動系統牽引性能研究
2018-04-04 02:23:48趙存王麗娟胡軍科楊武繼方立志
鐵道科學與工程學報 2018年3期
關鍵詞:系統
趙存,王麗娟,胡軍科,楊武繼,方立志
(1. 中南大學 機電工程學院,湖南 長沙 410083;2. 武漢天興洲道橋投資開發有限公司,湖北 武漢 430011;3. 金鷹重型工程機械有限公司,湖北 襄陽 441001)
隨著我國鐵路朝著高速、重載、大運量、高密度方向發展,對鐵道線路提出了更高的要求,軌道狀態的好壞直接關系著鐵路運輸的安全和效率。按目前的運輸密度,鐵路鋼軌的使用壽命大約在 5~6 a,這樣每年需更換 20%的鋼軌,按現有運營里程計算我國每年的換軌量達上萬公里[1]。大修列車是集換軌和換枕為一體的大型鐵路養護機械,具有作業效率高、施工質量好等特點,使長期以來長大隧道內和大型橋梁上難以實現的換枕換軌問題得以解決[2?3]。為了滿足大牽引力和特殊工況的動力性要求,大修列車驅動系統采用靜液壓多軸驅動(Hydrostatic transmission , HST)方式。由于這種車輛的行走驅動馬達采用十分少見的串聯連接方式,在大負載工況作業時,出現了驅動車輪的連續打滑和跳動,造成牽引力不夠甚至損傷軌道和車輪的現象。針對鐵路機械液壓行走驅動系統的研究主要如下:周友中[4]針對國產連續式搗固車出現運行小車不平穩和作業小車驅動馬達頻繁斷軸等現象,設計了具有結構簡單、響應速度快、穩定性好的搗固車靜液壓馬達并聯驅動系統。王弦[5]針對搗固車的作業工況,為08-32搗固車設計了能同時滿足區間高速運行和作業低速運行的馬達并聯靜液壓獨立驅動系統。周燕飛[6]在對清篩機走行驅動系統(前后兩轉向架四軸驅動的變量泵-變量馬達并聯閉式系統)分析的基礎上,設計了清篩機高速行走系統半物理仿真平臺。胡軍科等[7]對國產某型清篩機閉式液壓系統馬達損壞問題研究,指出閉式系統低壓側的壓力隨負載波動會放大高壓側壓力和流量的振蕩,通過合理匹配補油泵、沖洗閥和系統流量,可維持低壓側壓力恒定。崔艷鷺等[8]對QS2-650型全斷面道砟清篩機高速行走驅動液壓系統(馬達并聯)采用定量馬達和變量馬達2種方案的對比分析,得出變量馬達應用于清篩機高速走行系統時能明顯提高清篩機的輸出特性。韓強[9]通過對鐵路清篩機走行系統發動機反拖分析,提出主動升速提高發動機摩擦力矩和串接制動液壓泵兩種方案來解決車輛的反拖失速問題。蔣亞軍[10]對鋼軌打磨車液壓行走系統的傳動平穩性進行了研究,指出泵?馬達傳動系統的脈動對行走平穩性影響最大。雖然上面的這些方法可以解決現有鐵路車輛液壓行走驅動系統的問題,但都是集中于馬達并聯的靜液壓驅動系統,這種系統只能用于路況平順和運行速度不高的車輛。在鐵路大修作業時,其路況條件決定了不能使用這樣的并聯馬達驅動系統,除非在系統中加裝分流閥,但使用分流閥又存在分流誤差和壓力損失,這將導致車輛牽引力下降和系統發熱。相對于常用的馬達并聯靜液壓驅動系統,馬達串聯靜液壓系統具有路況適應性好、系統效率高和結構簡單可靠等優點,但其馬達的排量是并聯系統的2倍,加上在牽引力分配方面存在技術難度,故這種系統在車輛行走領域的應用和研究很少,目前還只有Harsco公司在鐵路大修列車上有工程應用。胡傳亮等[2]針對大修列車在使用中出現的車軸不同步問題,提出了調整控制油路補油閥彈簧預緊力的辦法。沙永柏等[11]對鉆孔機械中串聯馬達的承載力進行了分析,指出串聯時系統壓力主要由壓力油后經流的馬達承受。本文以某型大修列車行走系統為研究對象,對馬達串聯液壓驅動系統性能進行分析,指出串聯系統中的第1個馬達泄漏導致第2個馬達缺油吸空是車輛打滑的主因。為了補償泄漏,在2串聯馬達之間設置了旁路補油路,通過對旁路補油模塊分別設置減壓閥、電比例閥和三通流量控制閥3種補油方案建立系統動態數學模型,運用AMESim軟件進行仿真分析,結果證明了本文提出研究方案的正確性。
1 大修列車液壓驅動系統工作原理和打滑原因分析
1.1 液壓驅動系統工作原理
該型大修列車行走驅動系統是由4個油泵分別驅動4個轉向架,每個轉向架是由1臺電比例控制液壓泵和 2雙向變量馬達組成的串聯閉式液壓回路。系統原理圖如圖1所示。
驅動系統工作原理為:發動機1驅動雙向變量泵 2,變量泵出口壓力油先經過串聯第 1個馬達12.1(下文簡稱“馬達1”),再經過串聯第2個馬達12.2(下文簡稱“馬達2”),馬達2的進油口與馬達1的出油口順次相連,馬達2的回油直接返回變量泵的吸油腔,構成馬達串聯液壓行走驅動系統的閉式回路。當壓力油作用在馬達1和馬達2上時,在2個馬達上依次產生工作壓差,驅動車輛行走。通過泵的變量機構改變主油路中液壓油的流量和方向,實現馬達的變速和換向。
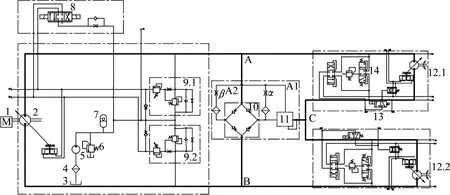
圖1 驅動系統液壓原理圖Fig. 1 Principle diagram of hydraulic driving system
旁路補油控制回路由α和β阻尼孔、單向閥橋路10和補油壓力控制模塊11組成。當馬達2缺油吸空時,C點壓力降低,來自系統高壓側的壓力油先經過單向閥橋路10,到達阻尼孔α,阻尼孔α出口的油液分成2路,一路作為補油壓力控制模塊的先導液,另一路經過阻尼孔β和單向閥,回到系統低壓側;補油模塊在先導壓力的作用下開啟,其開度大小由先導壓力、系統C處壓力和彈簧預緊力共同作用決定;閥口開啟后,系統高壓側的壓力油依次經過單向閥和補油控制模塊閥口,實現向2串聯馬達之間補油。阻尼孔α起延緩補油閥開啟速度防止液壓沖擊作用;固定阻尼孔β起建立先導壓力的作用,還可以在系統不需要補油時,控制補油閥彈簧復位。
1.2 車輪打滑原因分析
大修列車作業路況條件差,作業時負載波動大,同時,鐵路車輛沒有差速器,車軸與車輪、車輪與軌道都是剛性接觸,當負載增大時,系統壓力升高,馬達泄漏增加,其容積效率降低,導致流過馬達2的流量總是小于馬達1(2馬達排量相等),馬達2吸空,由于2馬達固定在同一個轉向架上屬于剛性連接則2馬達轉速相等,但馬達承擔的負載壓力不相等,導致功率寄生;當一個車輪的驅動力超過輪軌黏著極限時,車輛開始打滑。
2 旁路補油方法
基于上述分析,本文提出采用減壓閥、電比例閥和三通流量控制閥3種方式對馬達串聯液壓驅動系統進行旁路補油,以期補償串聯系統的泄漏流量,合理分配2馬達負載壓力,改善大修列車作業時的打滑情況。3種補油方案原理圖如圖2所示。
2.1 減壓閥補油原理
如圖2(a)所示的減壓閥補油原理為:通過設定減壓閥出口壓力(也是馬達2的入口C處壓力),使得作用在2馬達上的壓差相等。作業時,若2馬達壓差相等且能驅動負載,減壓閥不工作;當系統泄漏增大,通過馬達2的流量減少,其壓差不足以克服負載壓力時,該馬達吸空。此時,馬達2入口壓力低于減壓閥設定壓力,減壓閥開啟,通過補油路實現向系統補油。
2.2 電比例閥補油原理
電比例閥補油原理如圖 2(b)所示,原理為:2馬達壓差相等時,電比例閥無輸入信號時,閥口關閉;當2馬達壓差不等時,通過串接在系統中的壓力傳感器對2馬達的壓差自動檢測,放大元件對檢測的壓差信號放大處理并求差,然后將差值轉化為電流信號,電比例閥電磁鐵接收到輸入電流信號后,閥芯產生與控制電流相對應的開度,使油液經閥口流向補油管路,實現向串聯系統的補油。
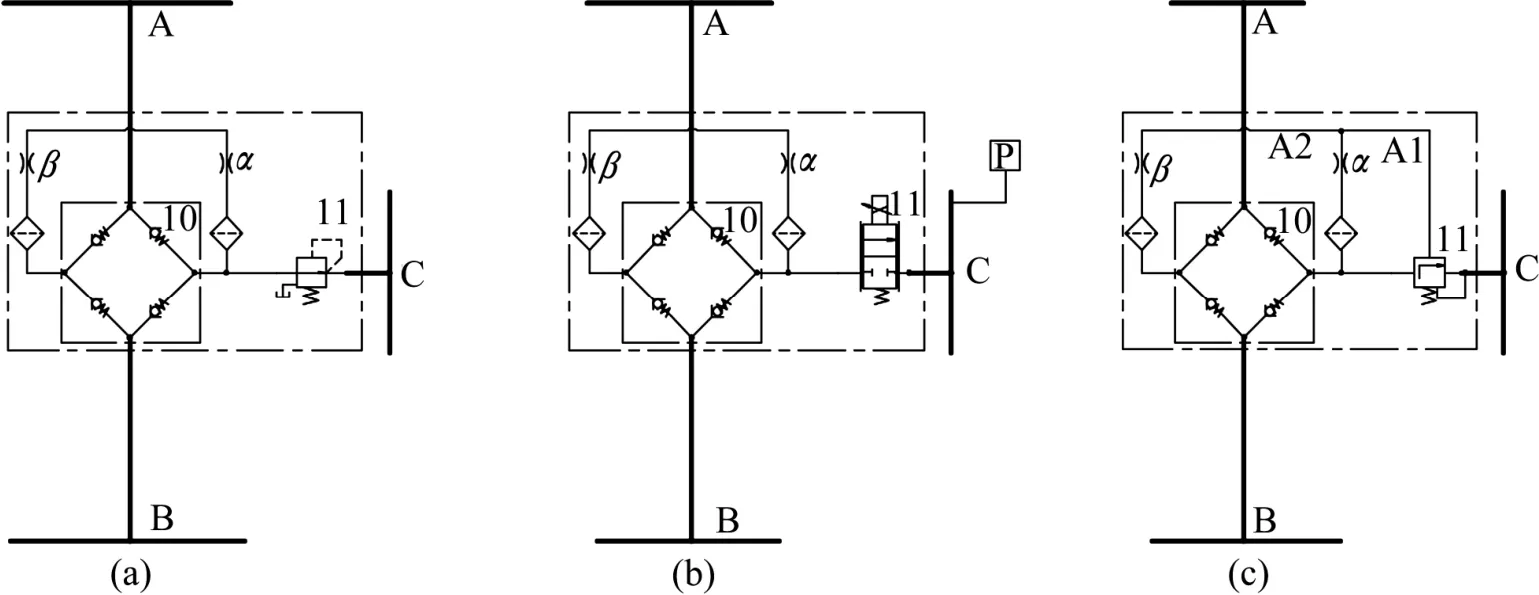
圖2 3種條件下的旁路補油原理圖Fig. 2 Principle diagram of bypass oil-compensating under three schemes
2.3 三通流量控制閥補油原理
三通流量控制閥補油原理如圖2(c)所示,三通流量控制閥是2個主油口常閉閥組,它有2個液壓先導端口,一端連在主閥出口(C處),另一端連在閉式系統補油路阻尼孔 α出口(A1處)作為先導壓力。閥芯的開啟由先導壓力決定,當先導壓力大于彈簧預緊力和閥出口壓力之和時,主閥芯開啟,實現向串聯系統的補油。三通流量閥可自動檢測系統壓力,通過判斷先導壓力、彈簧預緊力、2馬達之間C處的壓力來改變主閥芯位移,實現向系統補油。在閥的調節過程中,它實質上是一個可變阻尼。
3 系統數學模型
3.1 系統流量壓力特性、動力學分析
為了方便分析,假定2個馬達的泄漏系數相同,2馬達的流量損失可表示為:

3.1.1變量泵的輸出流量方程

式中: VP=Kdγ ;γ為變量調節機構的擺角;Kd為變量泵的排量梯度;np為變量泵的轉速;Cip為變量泵的內泄漏系數;Cep為變量泵的外泄漏系數;p和p2為泵高低壓腔的壓力。
由于p2為常數,不隨負載而變化,對上式進行簡化,并對其增量式進行拉氏變換,得到:

式中: Kqp為變量泵的流量增益,為變量泵的總泄漏系數
3.1.2液壓馬達的流量連續性方程
1) 泵出口到馬達1

式中:n1為馬達1轉速;Vm為馬達排量;V1為泵出口到馬達1的高壓側油路的工作容積;E為油液體積彈性模量;Pm1為馬達1工作壓差。
2) 馬達1到馬達2

式中:V2為馬達1出口到馬達2入口的密閉容腔的容積。
3.1.3液壓馬達與負載的動力學力矩平衡方程
1) 泵出口到馬達1

式中:Jm1為負載折算到馬達1軸上的總轉動慣量;Cfm為馬達轉動阻尼系數;TL1為折算到馬達1軸上的負載力矩。
2) 馬達1到馬達2

式中:Jm2為負載折算到馬達2軸上的總轉動慣量;TL2為折算到馬達2軸上的任意外加負載力矩。
3.2 補油路特性分析
3.2.1孔口流量表達式

式中:At為面積梯度;xv為閥芯位移(或閥口開度);Cd為流量系數;Δp為孔前后壓差;ρ為油液密度。
3.2.2減壓閥閥芯力平衡方程

式中: A=πd2/4為閥芯作用面積;d為當量直徑;P2為減壓閥出口設定壓力為彈簧預緊力為流量系數,αjet=69°;k為彈簧剛度;xv為閥口開度。
對上式進行整理得到:

3.2.3電比例閥閥芯力平衡方程

式中:x0為彈簧預壓縮量;xv為閥芯位移。對式(11)整理得到:

3.2.4三通流量控制閥補油閥口開度

式中:xv為閥口開度;Pmax為閥口最大開度對應的壓力。
4 仿真結果及分析
根據串聯系統特性函數,建立系統的AMESim仿真模型如圖3所示。
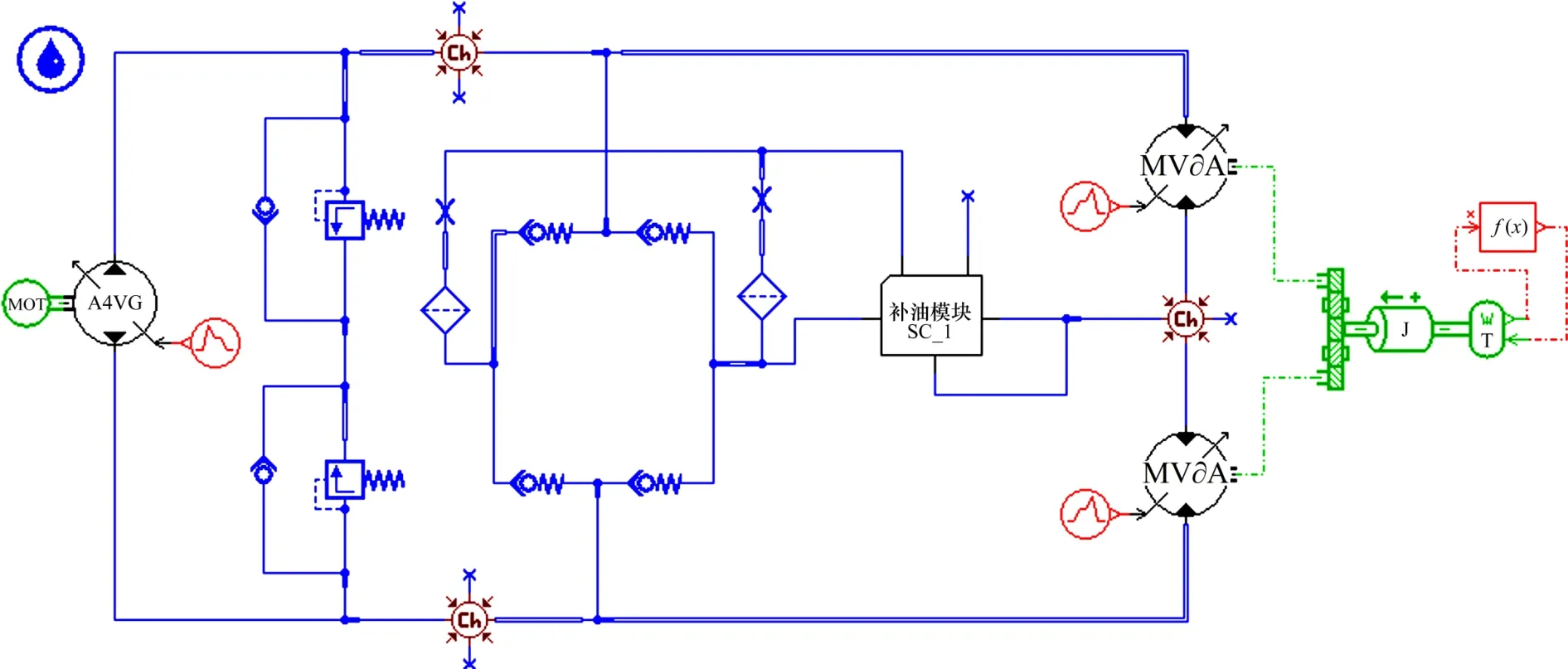
圖3 液壓驅動系統的AMESim仿真模型Fig. 3 AMESim model of hydraulic driving system
仿真模型中的泵、馬達子模型為超級元件,其中泵的超級元件子模型包含輔助泵。系統泄漏流量和沖洗流量通過泵、馬達的容積效率來體現。根據實驗測量數據,預先建立泵、馬達容積效率隨壓力、轉速變化關系的ASCII文件,仿真時將該文件中的數據組導入AMESim的子模型中。補油路中補油模塊根據3種補油方案,分別選用減壓閥、電比例閥和三通流量控制閥子模型。
參考實際工況,根據大修列車的主要技術參數,設置仿真模型參數。設定發動機轉速為額定轉速2 100 r/min;主泵最大排量78 ml/r,輔助泵排量為17 ml/r;液壓馬達排量160 ml/r;馬達軸上的等效轉動慣量為0.25 kg·m2,負載扭矩400 N·m。給泵斜坡信號,調節其排量從0到最大值變化。仿真運行4 s,時間間隔0.005 s。仿真結果如圖4~6所示。

圖4 減壓閥補油時馬達壓力特性曲線Fig. 4 Pressure characteristics of motors with pressure reduce valve in the oil-compensating circuit
由圖3減壓閥補油仿真結果可知:1)在啟動階段,馬達2壓差高于馬達1,這是由于減壓閥的在起始工作階段并不能減壓的特性引起的;當穩態運行時,2馬達承擔的負載壓力相等;2)對比圖 4(a)和圖4(b)可以看出,旁路無阻尼孔時,0.1~0.3 s之間,系統壓力存在劇烈振蕩;設置阻尼孔后,振蕩消失,這是由于阻尼孔的濾波作用導致的;3)在1.0 s之前,馬達2壓力持續上升直至最大,馬達1壓力為0;在1.0~2.0 s,馬達2壓力保持不變,馬達1壓力從0開始上升,2 s后穩態運行時,2馬達壓差相等,即系統驅動力分配均勻。
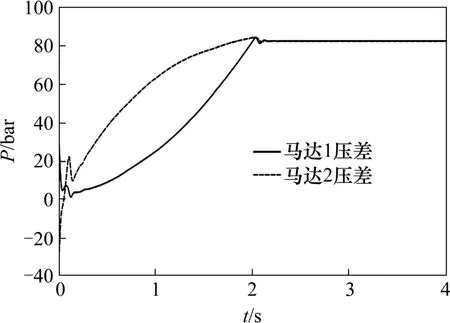
圖5 電比例閥補油時馬達壓力特性曲線Fig. 5 Pressure characteristics of motors with electric proportional valve in the oil-compensating circuit
由圖4可以看出,電比例閥補油時:1)在0~0.1 s之間,馬達 1壓差為正、馬達 2為負(吸空);在0~0.2 s之間,壓力有輕微的振蕩;在0.2~2.1 s之間,2馬達壓力開始升高,但是馬達2壓力曲線高于馬達1,表明在系統達到穩定之前,馬達2對負載的敏感性更強;2)穩態運行時,2馬達承擔的負載壓力相等,表明采用電比例閥基本能解決打滑問題。
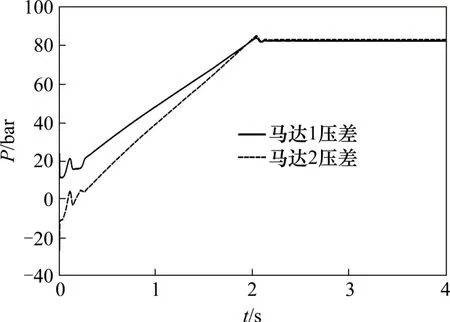
圖6 三通流量控制閥補油時馬達壓力特性曲線Fig. 6 Pressure characteristics of motors with 3-way-flow-control valve in the oil-compensating circuit
三通流量控制閥補油仿真結果如圖5所示,結果顯示:1)在0~0.25 s之間,壓力有輕微的波動;在 0.25~2.1 s之間,2馬達壓差曲線接近,表明 2馬達的同步性好,且其驅動力接近,系統的跟隨性和平穩性好。原因在于三通流量控制閥實質上可以等效為一個可變阻尼,它通過自動檢測系統壓力來控制其開度大小,從而實現補油量多少的精確控制;2)2.1 s后2馬達壓差相等,表明2馬達驅動的負載壓力相等,故采用三通流量閥補油能滿足車輛牽引性要求。
根據仿真結果,以現役的DXC500型大修列車行走驅動系統為研究對象,對采用液動閥的補油方案進行了試驗,該液動閥結構形式和工作原理類似于三通流量控制閥,試驗結果顯示,在作業過程中,采用液動閥補油后2馬達壓差誤差控制在5‰以內,試驗結果與仿真結果吻合,局部驗證了仿真結果的正確性。由于其他方式對行走驅動系統的改動較大,受到條件限制,完整全面的試驗驗證有待以后進一步的深入研究。
5 結論
1) 大修列車液壓驅動系統中,采用2馬達串聯的驅動方式,串聯第1個馬達泄漏導致容積效率降低,串聯第 2個馬達缺油吸空是車輪打滑的主要原因。
2) 串聯系統旁路補油回路補油閥分別采用減壓閥、電比例閥和三通流量控制閥均可以實現對系統泄漏的補償、改善車輪打滑情況和均衡負載壓力。通過在補油回路加阻尼的方式,可以減小系統在啟動時的壓力振蕩。
3) 對比3種補油閥方案,采用三通流量控制閥補油時串聯系統的同步性、平穩性和牽引力協調能力具有顯著優勢。
參考文獻:
[1] 高文. 無縫線路快速換軌作業車的設計[D]. 長沙: 中南大學, 2011.GAO Wen. Design of a rapid switching car for continuous welded rail[D]. Changsha: Central South University, 2011.
[2] 胡傳亮, 張炳山. DXC-500型大修列車驅動不同步問題的解決方案[J]. 交通世界, 2014, 10(4月上): 62?63.HU Chuanliang, ZHANG Bingshan. Solution to synchronization problem of driving system for DXC-500 overhaul-train[J].Transpoworld, 2014,10(Apr): 62?63.
[3] 夏春華. P95 大修列車龍門架齒輪箱走行裝置的國產化研制[J]. 上海鐵道科技, 2014(4): 44?45.XIA Chunhua. Domestic research of Longmen gear box running device for overhaul train[J]. Shanghai Railway Science & Technology, 2014(4): 44?45.
[4] 周友中. 連續式搗固車行走驅動液壓系統的研究[D].長沙: 中南大學, 2011.ZHOU Youzhong. Research on hydraulic driving system of the continuous tamping machine[D]. Changsha:Central South University, 2011.
[5] 王弦. 08_32搗固車靜液壓傳動行走系統的研究[D].長沙: 中南大學, 2008.WANG Xian. Research on hydrostatic transmission system of tamper 08-32[D]. Changsha: Central South University, 2008.
[6] 周燕飛. 清篩機高速走行系統半物理仿真平臺的研究[D]. 杭州: 浙江大學, 2016.ZHOU Yanfei. Research on hardware-in-the-loop simulation of the running system in ballast cleaner machine[D]. Hangzhou: Zhejiang University, 2016.
[7] 胡軍科, 周創輝, 劉鑫. 清篩機挖掘鏈閉式液壓系統低壓側壓力對系統輸出特性的影響[J].中國鐵道科學,2012, 33(5): 47?53.HU Junke, ZHOU Chuanghui, LIU Xin. Effect on the system output characteristics by the low pressure of excavating chain closed hydraulic system of ballast cleaning machine[J]. China Railway Science, 2012, 33(5):47?53.
[8] 崔艷鷺, 葉賢東, 王亞. AMESim 在清篩機液壓走行驅動系統分析中的應用[J]. 現代機械, 2015(5): 10?13.CUI Yanlu, YE Xiandong, WANG Ya. The application of AMESim in analysis of ballast screening machine hydraulic driving system[J]. Modern Machinery, 2015(5):10?13.
[9] 韓強. 軌道車輛液壓驅動走行系統的反拖問題研究[D].長沙: 中南大學, 2014.HAN Qiang. Research on dragging problem of rail vehicle hydraulic driving walking system[D]. Changsha:Central South University, 2014.
[10] 蔣亞軍. 鋼軌打磨車液壓行走系統傳動平穩性研究[D].長沙: 中南大學, 2015.JIANG Yajun. Research on transmission stability of hydraulic driving system of rail grinder[D]. Changsha:Central South University, 2015.
[11] 沙永柏, 孫友宏, 趙曉影. 串聯馬達承載力分析[J]. 液壓液力, 2009(40): 47?49.SHA Yongbo, SUN Youhong, ZHAO Xiaoying. Load capacity analysis of serial motors[J]. Hydrostatic and Hydrodynamics, 2009(40): 47?49.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32