一種無人機(jī)影像空三加密點(diǎn)抽稀算法
2018-04-08 01:45:56王刊生
測繪通報(bào) 2018年3期
關(guān)鍵詞:測繪
王刊生,鄭 亮
(中交第二公路勘察設(shè)計(jì)研究院有限公司,湖北 武漢 430056)
無人機(jī)遙感具有分辨率高、機(jī)動(dòng)靈活、實(shí)時(shí)性強(qiáng)等特點(diǎn),廣泛應(yīng)用于工程勘察領(lǐng)域。由于飛行姿態(tài)不穩(wěn)定、影像旋偏角大、航向及旁向重疊度不規(guī)則等因素,無人機(jī)影像容易產(chǎn)生復(fù)雜的幾何變形和灰度差異。影像匹配既是無人機(jī)影像空三加密的必要步驟,也是獲取測區(qū)全景正射影像圖的基礎(chǔ)性和關(guān)鍵性問題。目前無人機(jī)影像匹配主要采用基于計(jì)算機(jī)視覺的特征點(diǎn)檢測算法,如SIFT和SURF算法,這類算法對(duì)圖像的復(fù)雜變形和光照變化具有較強(qiáng)的適應(yīng)性,但是由于無人機(jī)影像分辨率高,匹配的特征點(diǎn)過多,雖然可以調(diào)整算法閾值減少特征點(diǎn)個(gè)數(shù),但是特征點(diǎn)的穩(wěn)定性也會(huì)同時(shí)下降,導(dǎo)致在紋理缺乏的區(qū)域,提取不到特征點(diǎn)。大量的匹配特征點(diǎn)一方面會(huì)降低區(qū)域網(wǎng)平差計(jì)算的效率,另一方面也會(huì)影響空三加密的精度。
為了提高大規(guī)模平差效率,Lourakis使用稀疏存儲(chǔ)與矩陣分解技術(shù)來求解法方程,Cornou等通過優(yōu)化減少位置變量個(gè)數(shù)來降低解算負(fù)擔(dān),馮其強(qiáng)等提出了對(duì)三維點(diǎn)逐點(diǎn)解算的點(diǎn)松弛法快速計(jì)算方法。本文針對(duì)無人機(jī)影像匹配特征點(diǎn)過多、分布不均勻的問題,在區(qū)域網(wǎng)平差前對(duì)特征點(diǎn)進(jìn)行預(yù)處理,通過全局抽稀和局部抽稀,控制特征點(diǎn)的數(shù)量和分布,達(dá)到優(yōu)化區(qū)域網(wǎng)平差的目的。全局抽稀是指對(duì)于整個(gè)影像集進(jìn)行點(diǎn)位抽稀,而局部抽稀則是對(duì)影像集中部分空間位置相鄰影像的抽稀,需要人工定義抽稀的目標(biāo)空間區(qū)域。局部抽稀是對(duì)全局抽稀的補(bǔ)充,主要是針對(duì)某些特殊情況,如全局抽稀后,某兩張影像之間徹底失去了點(diǎn)位聯(lián)系(即無法直接關(guān)聯(lián),或通過其他影像間接關(guān)聯(lián))。
1 基本需求
抽稀問題的需求,即解決以下描述的問題:如圖1所示,在一個(gè)影像集中,每一張影像上分布著大量的觀察點(diǎn)位,若干個(gè)觀察點(diǎn)位可能本質(zhì)上是同一個(gè)觀察位置,即同名點(diǎn)(文中稱連接點(diǎn))。現(xiàn)需要減少每一張影像上的觀察點(diǎn)位,使最終每一張影像上點(diǎn)位數(shù)量急劇減少且均勻分布,數(shù)量標(biāo)準(zhǔn)為盡量使劃分的網(wǎng)格中僅保留一個(gè)點(diǎn)位。刪除某一個(gè)觀察點(diǎn)位時(shí),必須刪除其他同名的觀察點(diǎn)位。此外還應(yīng)滿足一定的約束條件,如優(yōu)先保留連接度高的點(diǎn)(連接度指連接點(diǎn)包含觀察點(diǎn)的數(shù)量)、距離網(wǎng)格中心近的點(diǎn),以及其他約束條件。

圖1 空三加密點(diǎn)示意圖
2 模型構(gòu)建和基本策略
2.1 抽稀的模型構(gòu)建
抽稀過程的模型,即是算法中操作的基本單元,在代碼中表現(xiàn)為類設(shè)計(jì)。整個(gè)抽稀算法過程涉及的相關(guān)類有5個(gè):①影像類:包含影像的名稱、編號(hào),觀察點(diǎn)列表及相關(guān)的標(biāo)記信息(如是否在圈定區(qū)域內(nèi),是否參與抽稀等);②觀察點(diǎn)類:包含從屬影像的編號(hào)、從屬連接點(diǎn)編號(hào)、自編號(hào)、坐標(biāo)信息;③連接點(diǎn)類:自編號(hào)、連接度、網(wǎng)格索引號(hào)列表、平均去心距離、觀察點(diǎn)列表,以及相關(guān)標(biāo)記;④關(guān)聯(lián)度類:被關(guān)聯(lián)的兩張圖像的指針、關(guān)聯(lián)度及相關(guān)標(biāo)記;⑤抽稀器類:與抽稀相關(guān)的設(shè)置參數(shù)(如影像寬高信息、數(shù)量信息、抽稀強(qiáng)度參數(shù)、網(wǎng)格劃分參數(shù)等)、中間統(tǒng)計(jì)信息、連接點(diǎn)容器,以及兼容的原始數(shù)據(jù)的各種接口和抽稀過程中的各種步驟方法函數(shù)等。這5個(gè)模型的協(xié)作關(guān)系如圖2所示。

圖2 抽稀模型間的關(guān)系
2.2 基本策略
抽稀的基本策略是選點(diǎn),即獲取原始點(diǎn)位數(shù)據(jù),將影像劃分為網(wǎng)格單元之后,將觀察點(diǎn)位歸并為連接點(diǎn)并根據(jù)約束條件進(jìn)行排序。清空所有的原始點(diǎn)位,然后從已排序的連接點(diǎn)列表中,對(duì)第一名的連接點(diǎn)開始考察選入,并填充單元網(wǎng)格,直到單元網(wǎng)格滿足每格一點(diǎn)的要求時(shí),即完成抽稀過程。
3 全局抽稀算法
3.1 讀入數(shù)據(jù)構(gòu)建模型
原始的數(shù)據(jù)格式可能有兩種情況:以連接點(diǎn)為單位,每一條數(shù)據(jù)記錄了一個(gè)連接點(diǎn)及其包含的觀察點(diǎn)的信息,影像編號(hào)作為觀察點(diǎn)的屬性;以圖像為單位,每一條數(shù)據(jù)記錄了圖像及其包含的觀察點(diǎn)的信息,連接點(diǎn)編號(hào)作為觀察點(diǎn)的屬性。
根據(jù)算法的需要,以連接點(diǎn)為單位的格式是更為合適的,因此,在處理以圖像為單位的數(shù)據(jù)之前,還需要作一步額外的轉(zhuǎn)換,轉(zhuǎn)換為以連接點(diǎn)為單位的模型。
構(gòu)建模型主要是構(gòu)建連接點(diǎn)的數(shù)組,計(jì)算連接點(diǎn)的相關(guān)信息(連接度、平均去心距離、觀察點(diǎn)指針集等屬性),以及計(jì)算各單元網(wǎng)格的屬性等。
3.2 網(wǎng)格劃分
所有的影像均采取統(tǒng)一的劃分方式。劃分方式?jīng)Q定抽稀強(qiáng)度,即抽稀后點(diǎn)密度是最關(guān)鍵的因素,最小可以按3×3劃分,也可以按其他行列數(shù)劃分,但行數(shù)或列數(shù)不應(yīng)超過10,否則將導(dǎo)致后續(xù)解算過程中內(nèi)存不夠或耗時(shí)過長。
3.3 獲取原始空格編號(hào)
獲取原始空格編號(hào)是構(gòu)建算法過程結(jié)束的標(biāo)志的必要一步。本算法中以所有網(wǎng)格均有點(diǎn)為結(jié)束標(biāo)志,如果劃分的單元格中原本就沒有觀察點(diǎn),那結(jié)束條件將永遠(yuǎn)不能滿足,程序?qū)⑾萑胨姥h(huán),而實(shí)際上空間上排布在最外圍的影像的靠外圍的區(qū)域一般是缺少點(diǎn)或沒有點(diǎn)的,因?yàn)闆]有與其他影像形成公共區(qū)域。獲取原始空格編號(hào),即是讓原始空格不參與程序的運(yùn)算。
3.4 連接點(diǎn)排序
將第一步中得到的連接點(diǎn)數(shù)組,按照一定的排序規(guī)則進(jìn)行排序,為后續(xù)的選點(diǎn)抽稀作準(zhǔn)備。排序的規(guī)則是根據(jù)實(shí)際需求決定的,規(guī)則的靈活性決定了抽稀的靈活性。排序規(guī)則可以定性也可以定量,如目前抽稀算法使用的規(guī)則是定性規(guī)則,規(guī)則指標(biāo)有兩個(gè):①連接點(diǎn)的連接度(連接點(diǎn)包含觀察點(diǎn)的個(gè)數(shù));②連接點(diǎn)的去心距離(觀察點(diǎn)距離各自單元格中心的距離的均值)。連接度作為第一指標(biāo),去心距離作為第二指標(biāo),即判斷兩個(gè)連接點(diǎn)的順序,當(dāng)?shù)谝恢笜?biāo)不同時(shí),只考慮第一指標(biāo),相同則考慮第二指標(biāo),依次類推。如果使用定量規(guī)則,則應(yīng)當(dāng)對(duì)每一個(gè)指標(biāo)賦予權(quán)值,通過加權(quán)的方式計(jì)算綜合評(píng)分,然后根據(jù)評(píng)分進(jìn)行排序。
3.5 選點(diǎn)抽稀
如圖3所示,在得到排序后的連接點(diǎn)列表之后,清空原圖像中的所有點(diǎn)位,并從列表中第一個(gè)點(diǎn)開始判斷選入。選入一個(gè)連接點(diǎn)即選擇了該點(diǎn)包含的所有觀察點(diǎn),因此觀察點(diǎn)對(duì)應(yīng)的單元格所包含的觀察點(diǎn)個(gè)數(shù)開始增加,當(dāng)選擇了一定量的連接點(diǎn)后,除原先無點(diǎn)的單元格以外的所有單元格都應(yīng)有觀察點(diǎn),此時(shí)抽稀結(jié)束。值得一提的是,選點(diǎn)過程并非是完全根據(jù)連接點(diǎn)的排名順序,因?yàn)橛行c(diǎn)的排名很靠前,但是其觀察點(diǎn)所在的單元格已經(jīng)有點(diǎn)存在,則這樣的連接點(diǎn)對(duì)于填充單元格沒有意義,因此不選擇,同理對(duì)于填充單元格意義較小的點(diǎn)也暫不選擇。對(duì)于填充單元格可以設(shè)定一個(gè)閾值,這個(gè)閾值代表了連接點(diǎn)的連接度重視程度,閾值越大,則更優(yōu)先保留連接度大的點(diǎn),但此時(shí)保留的總點(diǎn)數(shù)也會(huì)相應(yīng)增加。目前算法中初始閾值設(shè)定為0.5,即當(dāng)連接點(diǎn)能夠貢獻(xiàn)的“新格”數(shù)量大于等于其觀察點(diǎn)數(shù)量的一半時(shí)被選擇,如果按照初始閾值,對(duì)點(diǎn)列表選擇一遍之后,如果仍不能填滿單元格,則將閾值降為一半,降低要求再次從頭選擇,第二遍僅對(duì)沒有被選入的點(diǎn)進(jìn)行考察,即保留已經(jīng)選入的連接點(diǎn)。依次類推,直到所有單元格填充完畢。

圖3 選點(diǎn)抽稀算法流程
3.6 模型轉(zhuǎn)數(shù)據(jù)
模型轉(zhuǎn)數(shù)據(jù)是第一步的逆操作,即將算法的模型結(jié)果轉(zhuǎn)換保存為讀入時(shí)的數(shù)據(jù)形式,交還給用戶。
4 局部抽稀算法
局部抽稀算法是全局抽稀算法的一個(gè)拓展,區(qū)別在于支持用戶自定義抽稀區(qū)域。算法步驟與全局抽稀基本相同,但是在第一步讀入數(shù)據(jù)構(gòu)建模型之后,多出一個(gè)環(huán)節(jié),即計(jì)算影像與影像之間的關(guān)聯(lián)度,關(guān)聯(lián)度用兩張影像之間公共的連接點(diǎn)數(shù)量來表示。關(guān)聯(lián)度的計(jì)算與顯示,主要是為用戶服務(wù),是用戶圈定抽稀區(qū)域的主要依據(jù),一般來說,用戶希望抽稀應(yīng)該在關(guān)聯(lián)度過大的、空間相關(guān)的一批影像之間進(jìn)行。當(dāng)用戶根據(jù)影像的空間位置關(guān)系及影像的關(guān)聯(lián)程度圈定出抽稀區(qū)域之后,位于區(qū)域之內(nèi)影像將被逐一判斷是否與外界影像有聯(lián)系,如果沒有則參與抽稀,反之則不參與抽稀,其目的在于防止抽稀的刪點(diǎn)斷開了內(nèi)外影像間的聯(lián)系。
局部抽稀工具如圖4所示,圖中劃區(qū)僅示意,不代表任何實(shí)際需求,折線所包圍塊點(diǎn)表示實(shí)際參與抽稀的影像。

圖4 局部抽稀工具
5 試驗(yàn)結(jié)果
由于局部抽稀實(shí)質(zhì)上是劃定范圍的全局抽稀,因此本次試驗(yàn)僅以全局抽稀為例,驗(yàn)證算法的抽稀速度和抽稀后保留點(diǎn)的數(shù)量,并將抽稀前后的結(jié)果進(jìn)行平差對(duì)比,驗(yàn)證效率的提升和精度的不變性。
表1為湖北黃梅某測區(qū)無人機(jī)影像數(shù)據(jù),不同網(wǎng)格劃分方案,原始數(shù)據(jù)中影像數(shù)量為568張,連接點(diǎn)數(shù)量為217 663個(gè),觀察點(diǎn)總數(shù)量為1 028 363個(gè)。前3組劃分方式(3×3,4×4,5×5)為試驗(yàn)劃分方案,最后一組為多次試驗(yàn)之后實(shí)際工作中的采用方案。抽稀結(jié)果見表1。

表1 抽稀基本結(jié)果
被保留的連接點(diǎn)的連接度分布見表2。
由試驗(yàn)結(jié)果可以看出,該抽稀算法具有良好的抽稀效率,靈活性強(qiáng),能夠適應(yīng)不同抽稀程度要求及不同約束條件,抽稀結(jié)果穩(wěn)定,對(duì)于平差效率提升很大,且基本不影響平差精度。試驗(yàn)中抽稀后平差精度稍優(yōu)于抽稀前并不能說明抽稀能穩(wěn)定提升精度,稍優(yōu)是抽稀過程偶然去除了較多錯(cuò)點(diǎn)導(dǎo)致的。
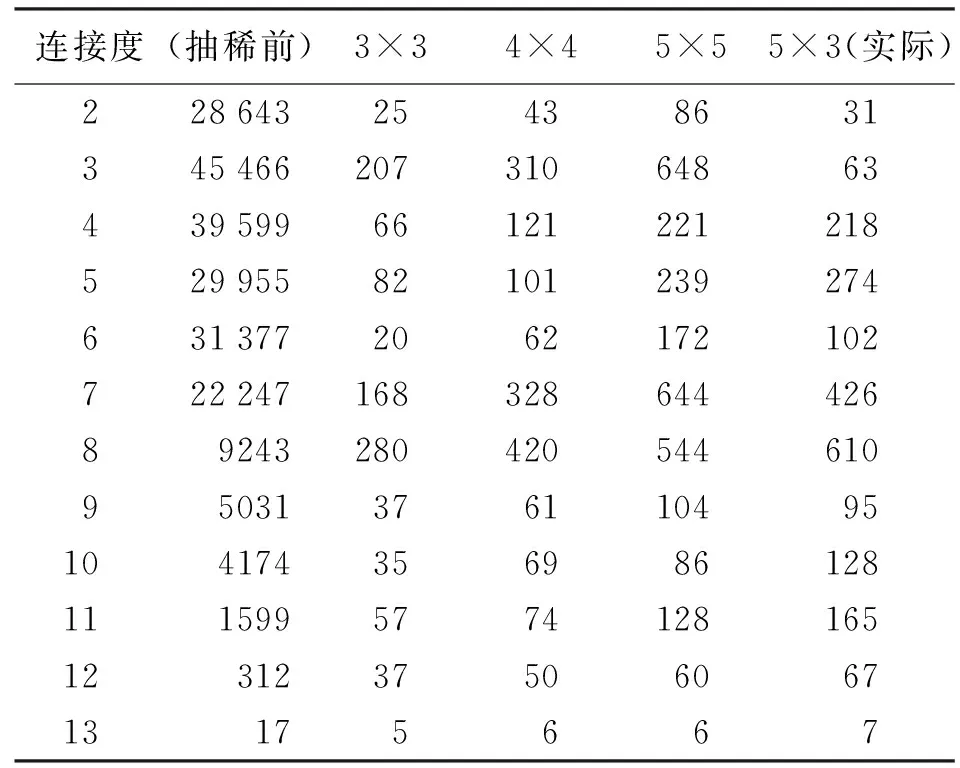
表2 連接度分布
參考文獻(xiàn):
[1] 鄭亮,董衛(wèi)艷,原保成.無人機(jī)遙感在海外高速公路勘測中的應(yīng)用[J].測繪通報(bào),2017(7):81-84.
[2] 李德仁,李明.無人機(jī)遙感系統(tǒng)的研究進(jìn)展與應(yīng)用前景[J].武漢大學(xué)學(xué)報(bào)(信息科學(xué)版),2014,39(5):505-513.
[3] 劉玉軒,藍(lán)朝楨,李參海,等.無人機(jī)影像匹配中尺度不變特征應(yīng)用改進(jìn)[J].測繪科學(xué),2016,41(7):37-40.
[4] 胡同喜,牛雪峰,譚洋,等.基于SURF算法的無人機(jī)遙感影像拼接技術(shù)[J].測繪通報(bào),2015(1):55-58.
[5] 梁煥青,謝意,付四洲,等.顏色不變量與 AKAZE特征相結(jié)合的無人機(jī)影像匹配算法[J].測繪學(xué)報(bào),2017,46(7):900-909.
[6] LOWE D G.Object Recognition from Local Scale-invariant Features[C]∥Proceedings of the Seventh IEEE International Conference on Computer Vision.Kerkyra:IEEE,1999:1150-1157.
[7] LI Qiaoliang,WANG Guoyou,LIU Jianguo,et al.Robust Scale-invariant Feature Matching for Remote Sensing Image Registration[J].IEEE Geoscience and Remote Sensing Letters,2009,6(2):287-291.
[8] LOURAKIS M,ARGYROS A.The Design and Implementation of a Generic Sparse Bundle Adjustment Software Package Based on the Levenberg Marquardt Algorithm[R].[S.l.]:ICS,2004.
[9] CORNOU S,DHOME M,SAYD P,et al.Bundle Adjustment:A FastMethod with Weak Initialisation[J].BMVC,2002:223-232.DOI:10.5244/C.16.20.
[10]馮其強(qiáng),李廣云,李宗春.基于點(diǎn)松弛法的自檢校光束法平差快速計(jì)算[J].測繪科學(xué)技術(shù)學(xué)報(bào),2008,25(4):300-302.
[11]李鑫,孫偉,李林.基于改進(jìn)SIFT算法的無人機(jī)影像匹配[J].測繪科學(xué)與工程,2017,37(3):39-43.
歡迎訂閱《測繪通報(bào)》
《測繪通報(bào)》創(chuàng)刊于1955年,是由國家測繪地理信息局主管、中國地圖出版社(測繪出版社)主辦的反映我國測繪地理信息科技發(fā)展現(xiàn)狀和指導(dǎo)全國測繪地理信息生產(chǎn)業(yè)務(wù)的綜合性、技術(shù)性刊物。現(xiàn)為《中文核心期刊要目總覽》收錄期刊、中國科技核心期刊(中國科技論文統(tǒng)計(jì)源期刊)、中國科學(xué)引文數(shù)據(jù)庫(CSCD)來源期刊、中國學(xué)術(shù)期刊網(wǎng)絡(luò)出版總庫(CAJD)全文收錄期刊、中國學(xué)術(shù)期刊綜合評(píng)價(jià)數(shù)據(jù)庫(CAJCED)核心統(tǒng)計(jì)源期刊、《中國學(xué)術(shù)期刊文摘》收錄期刊。曾被評(píng)為第二、三屆國家期刊獎(jiǎng)百種重點(diǎn)期刊,多次榮獲全國優(yōu)秀測繪地理信息期刊獎(jiǎng)。
《測繪通報(bào)》的主要內(nèi)容包括大地測量、全球?qū)Ш叫l(wèi)星系統(tǒng)(GNSS)、攝影測量、遙感(RS)、地圖制圖、地理信息系統(tǒng)(GIS)、工程測量、礦山測量、地籍測繪、海洋測繪、測繪儀器、信息傳輸、圖形圖像處理等方面的新成果和新技術(shù);行業(yè)管理、科研、教學(xué)、生產(chǎn)的先進(jìn)經(jīng)驗(yàn);計(jì)算機(jī)、通信等相關(guān)理論技術(shù)在測繪地理信息領(lǐng)域里的應(yīng)用及測繪地理信息科技在國家經(jīng)濟(jì)建設(shè)各個(gè)方面的應(yīng)用;國內(nèi)外測繪地理信息學(xué)術(shù)動(dòng)態(tài)及有關(guān)測繪地理信息科技信息等。
《測繪通報(bào)》的主要欄目有學(xué)術(shù)研究、技術(shù)交流、測繪地理信息論壇、經(jīng)驗(yàn)介紹、測量員之窗、國外測繪地理信息、行業(yè)管理、行業(yè)研究、行業(yè)調(diào)查、知識(shí)窗、新書介紹、企業(yè)之窗、測繪地理信息教學(xué)等。
《測繪通報(bào)》為月刊,2018年定價(jià):35.00元,郵發(fā)代號(hào):2-223。
編輯部地址:北京市西城區(qū)三里河路50號(hào),郵編:100045,訂閱電話:010-68531192(金老師),68531317(傳真)。
網(wǎng)址:http:∥tb.sinomaps.com
猜你喜歡
城市勘測(2023年5期)2023-11-03 01:32:36
經(jīng)緯天地(2021年5期)2021-12-27 02:32:28
浙江國土資源(2019年10期)2019-10-31 03:17:00
建材發(fā)展導(dǎo)向(2019年10期)2019-08-24 06:25:28
江西建材(2018年4期)2018-04-10 12:37:38
中國公共安全(2017年7期)2017-10-13 08:18:11
電子制作(2017年9期)2017-04-17 03:01:00
衛(wèi)星與網(wǎng)絡(luò)(2015年5期)2015-12-20 09:07:37
衛(wèi)星與網(wǎng)絡(luò)(2015年12期)2015-10-27 02:21:46
河南科技(2014年1期)2014-02-27 14:04:09
