基于實時控制分配策略的航天器姿態跟蹤
2018-04-13 08:28:04郭顥萌
計算技術與自動化 2018年2期
郭顥萌


摘要:針對含有冗余執行器的航天器姿態跟蹤控制系統,首先將故障觀測器得到的執行器部分失效因子估計矩陣的逆作為權值矩陣,改進了開環偽逆控制技術,并進一步考慮執行器飽和以及響應速率約束,設計了基于向量二次最優規劃的開環動態控制分配方案。考慮到執行器安裝矩陣偏差會導致開環實時控制分配策略方案產生的執行器實際力矩與控制器期望力矩誤差,設計了實時控制分配策略的系統結構,并給出了實時控制分配策略系統穩定的一個充分條件。最后,通過MATLAB仿真實驗,從結果中看出在保證實時控制分配策略系統角速度誤差和姿態四元數誤差快速收斂的同時,各執行器的輸出力矩均能滿足輸入飽和受限及響應速率約束,驗證了本文設計的實時控制分配策略方案的有效性和可靠性。
關鍵詞:航天器;姿態跟蹤控制;控制分配;執行器部分失效;冗余執行器
中圖分類號:TP732.1
文獻標識碼:A
0引言
由于航天器進入工作軌道后需要完成多種空間任務,其中,姿態跟蹤控制是一類實現航天器跟蹤任務的關鍵技術。然而,執行器故障往往會導致航天器在軌任務的失敗,對此,考慮含有冗余執行器的控制系統,采用控制分配技術可將偽控制指令進行重分配,確保所有的執行機構仍然能夠產生期望的控制量,從而保證系統對故障的容錯控制能力[1]。
早期的控制分配研究,主要是利用安裝矩陣求偽逆技術[2-3],本質上是固定分配,因而往往不能充分利用執行器冗余的優勢。考慮執行器冗余的控制分配方案,已有很多學者提出了不同的解決方法,如串接鏈形式[4]、直接分配[5]、以及動態控制分配[6],其中,Jin[7]在傳統偽逆控制分配方案基礎上,有效地解決了考慮執行器輸出飽和的控制分配問題。文獻[8]針對一類過驅動的線性系統,考慮執行器故障,設計了結合控制分配的積分滑模控制器,相比于傳統容錯控制方法,此方法避免了控制器重構的繁瑣;Shen[3]等人結合文獻[8]所述控制分配方案,考慮執行器冗余的航天器姿態跟蹤控制系統,設計了無需轉動慣量矩陣的自適應故障容錯控制器。
上述控制策略均需假設執行器安裝矩陣準確等于其真實值,但在實際工程中,安裝誤差難免會存在,因而會導致控制器輸出的虛擬控制力矩與實際執行器合成力矩存在誤差項。因而,上述開環實時控制分配策略方案不能確保閉環系統的穩定性,由此提出實時控制分配策略方案,2hang[9]針對衛星精確指向控制系統,在常見的串級廣義偽逆控制分配基礎上,設計了實時控制分配策略系統,并且給出了閉環系統穩定的一個充分條件;Hu和Lj[10]在文獻[9]的實時控制分配策略結構基礎上,考慮執行器飽和以及響應速率約束,改變了開環實時控制分配策略策略,證明了實時控制分配策略系統的穩定性。
針對考慮執行器部分失效故障和受到外部干擾力矩的航天器姿態跟蹤控制系統,首先,利用執行器部分失效因子估計信息,設計開環偽逆控制分配方案,并在此基礎上,進一步考慮執行器飽和以及響應速率約束,設計開環動態控制分配方案,然后,設計實時控制分配策略系統,并給出了閉環系統穩定的充分條件;最后,借助MATLAB/Siumlink數值仿真實驗,驗證所設計的實時控制分配策略的有效性。
1 航天器姿態跟蹤系統模型
1.1 剛體航天器姿態跟蹤控制系統模型
考慮剛體航天器姿態跟蹤控制系統,假設航天器模型有m(m>3)個冗余配置的反作用飛輪,則航天器姿態跟蹤系統動力學和運動學模型為:
2 開環實時控制分配
考慮含有冗余執行器的航天器姿態跟蹤系統,首先,介紹傳統偽逆控制分配方案,并且考慮執行器部分失效故障,進一步改進偽逆控制分配方案;然后,考慮執行器飽和與響應速率約束問題,提出偽逆控制分配方案的常見處理方式,并最終設計開環動態控制分配方案。
2.1 執行器部分失效的偽逆控制分配方案
假設航天器模型有m(m>3)個冗余配置的反作用飛輪,則式(1)所示的航天器姿態跟蹤系統動力學方程可以改寫為:
本文主要討論航天器姿態跟蹤控制系統的控制分配問題,因此,可以根據文獻[12]設計故障觀測器得到執行器失效因子估計值г*,同時,采用傳統的PD控制器保證系統的穩定性,由此,可以進一步設計控制分配方案。
文獻[13]指出,如果控制分配問題為向量l范數,則為了利用盡可能少的執行器完成控制任務,往往會導致執行器處于飽和狀態,且優化問題的解不唯一;但是如果控制分配問題為向量2范數,則能更有效地將期望的控制力矩合理分配到每一個執行器,同時,優化問題的解將隨著某一參數的變化而連續變化且唯一。因而,本文均采用向量2范數描述的控制分配模型。
考慮式(4)所示的執行器部分失效故障,則向量2范數最優控制分配問題可以描述為:
其中,s表示由于執行器部分失效因子估計誤差帶來的殘差項,其向量2范數有界,Q為關于殘差項s的對角且是正定的權值矩陣。如果殘差項為零,則上述控制分配問題可以得到確切的解,而殘差項的存在,擴大控制分配問題解的集合,可以根據約束條件或者不同控制目標選取其近似解[14]。
2.2 執行器部分失效及約束的動態控制分配方案
偽逆控制分配方案的優點在于其求解過程相對較為簡單,更容易在計算性能有限的航天器在軌任務中實現,但偽逆控制分配方案最大的缺點在于很難處理執行器自身的約束,例如執行器飽和以及響應速率約束下,往往偽逆控制分配不能在可行集合中求得最優的控制分配問題的解。針對上述問題,文獻[15]在傳統偽逆控制分配方案基礎上,利用執行器控制效率矩陣零空間特性,去修正控制分配方案,可以將超出執行器飽和的解重新分配到可行解集合內。
本文將進一步考慮執行器部分失效、執行器飽和以及響應速率約束,設計開環動態控制分配方案,即在特定的優化目標和約束條件下,實時有效地實現優化的控制分配,更好地利用冗余執行器的解析冗余自由度。考慮執行器飽和約束及執行器響應速率約束,將執行器輸出力矩uc(t)受到的約束描述為:
3 閉環實時控制分配策略
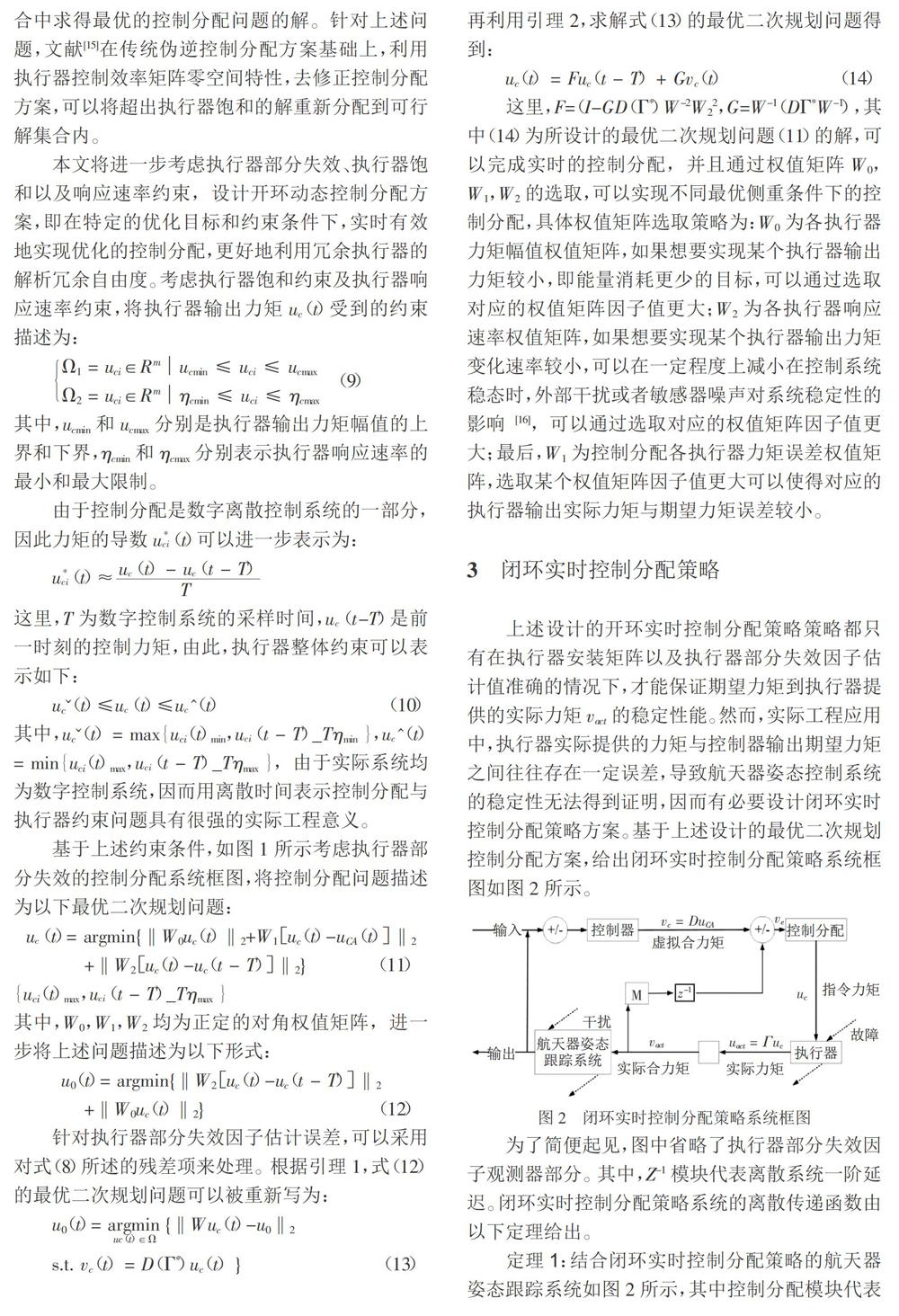
上述設計的開環實時控制分配策略策略都只有在執行器安裝矩陣以及執行器部分失效因子估計值準確的情況下,才能保證期望力矩到執行器提供的實際力矩vact的穩定性能。然而,實際工程應用中,執行器實際提供的力矩與控制器輸出期望力矩之間往往存在一定誤差,導致航天器姿態控制系統的穩定性無法得到證明,因而有必要設計閉環實時控制分配策略方案。基于上述設計的最優二次規劃控制分配方案,給出閉環實時控制分配策略系統框圖如圖2所示。
為了簡便起見,圖中省略了執行器部分失效因子觀測器部分。其中,Z-1模塊代表離散系統一階延遲。閉環實時控制分配策略系統的離散傳遞函數由以下定理給出。
定理1:結合閉環實時控制分配策略的航天器姿態跟蹤系統如圖2所示,其中控制分配模塊代表式(14)所示開環最優二次規劃控制分配問題的解,則閉環實時控制分配策略離散傳遞函數可以表示為:
利用MATLAB/Simulink仿真平臺,搭建航天器姿態跟蹤實時控制分配策略系統,根據實際數字系統選取采樣時間T= 0.2s,并經過不斷調試參數,選取實時控制分配策略權值矩陣,同時給出執行器約束條件如表1所示:
考慮上述給出的執行器故障和約束情況,運行整個航天器姿態控制閉環系統,得到仿真結果如下所示:
由圖3和圖4可知,在受到外部干擾情況下,執行器發生未知常值部分失效時,所設計的基于實時控制分配策略的姿態跟蹤主動容錯控制系統,在15s內實現姿態誤差以及角速度誤差的收斂。并且,從圖5可以明顯看到,各執行器的輸出力矩均滿足飽和受限及響應速率約束,說明利用本文提出的控制分配算法可以獨立于控制器的設計來解決執行器飽和與響應速率約束問題。決執行器約束問題。最后,從圖6中可以看出,本文所設計的實時控制分配策略保證各執行器實際輸出合力矩能夠在內較好地跟蹤上控制器輸出的期望三軸力矩,驗證40s了所設計算法的有效性。
5 結論
隨著航天器種類和數量的增多,對航天器的姿態跟蹤技術正朝著實時控制的方向發展。從現實的角度提出了含有冗余執行器實時控制策略的航天器姿態跟蹤系統。首先介紹了航天器姿態跟蹤的發展現狀和本文的研究背景。然后給出了剛體航天器姿態跟蹤控制系統模型和執行器部分失效故障模型,并給出了相關引理。最后提出了偽逆控制分配方案的常見處理方式,并設計開環動態控制分配方案,設計的最優二次規劃控制分配方案,給出閉環實時控制分配策略。在對此系統做了相關性能測試后,證明了所設計的基于實時控制分配策略方案的航天器姿態跟蹤容錯控制算法的有效性。
目前只在系統理論上實現了對航天器姿態跟蹤的實時控制策略,下一步的工作是將研究閉環控制分配系統穩定的充分必要條件。同時還會在執行器全部失效條件下對航天器進行姿態跟蹤研究,且使航天器姿態跟蹤系統實現最短的時延控制。
參考文獻
[1] 張愛華.過驅動航天器執行機構姿態容錯控制分配研究[D].哈爾濱:哈爾濱工業大學,2014.
[2] ALWI H,EDWARDS C.Fault Tolerant Control Using SlidingModes with On -line Control Allocation [J]. Autoruatica,2014,44 (7):1859-1866.
[3] SHEN Q,WANC D,ZHU S,et a/.lnertia-free Fault-tolerantSpacecraft Attitude Tracking Using Control Allocation [J].Automatica,2015,62:114-121.
[4]
BUFFINCTON J M, ENNS D F,TEEL A R.Control Allocationand Zero Dynamics [J].Joumal of guidance, control, 305 anddynaruics, 2014, 21 (3): 458-464.
[5] DURHAM W C.Constrained Control Allocation[J].Joumal ofGuidance, Control, and Dynamics, 2013, 16 (4): 717-725.
[6] ZHONG S,BO L,H Qing-lei,et a/.Dynarruc Control AllocationBased-on Robust Adaptive Backstepping Control for AttitudeManeuver of Spacecraft with Redundant Reaction rWheels [C].CControl and Decision Conference (CCDO ,2012 24th 23 -25May, Taiyuan, Chinese, IEEE,2012: 1354-1359.
[7] JIN J.Modified Pseudoinverse Redistribution Methods forRedundant Controls Allocation U]. Joumal of guidance,control, and dynamics, 2015,28 (5): 1076-1079.
[8]
HAMAYUN M T,EDWARDS C,ALWI H.Design and Analysisof an Integral Sliding Mode Fault-tolerant Control Scheme EJ].Automatic Control, IEEE Transactions on. 2014, 57 (7):1783-1789.
[9]
ZHANC Y,CHEN Z.A Closed-loop Control Allocation Methodfor Satellite Precision Pointing [C]. Industrial Informatics(INDIN), 2012 lOth IEEE Intemational Conference on. 25-27July 2012, Beijing, Chinese,IEEE,2012:1108-1112.
[1O] HU Q,LI B,ZHANC Y.Nonlinear Proportional-derivativeControl Incorporating Closed -loop Control Allocation forSpacecraft [J] Joumal of Cuidance, Control, and Dynamics,2014,37 (3):799-812.
[11] XIAO B,HU Q,FRISWELL M I.Active Fault-tolerant AttitudeControl for Flexihle Spacecraft with Loss of ActuatorEffectiveness [J]. Intemational Joumal of Adaptive Control andSignal Processing, 2013 ,27(ll):925-943.
[12]肖冰.執行器故障的航天器姿態容錯控制[D].哈爾濱:哈爾濱工業大學,2014.
[13] HARKECARD 0.Backstepping and Control Allocation withApplications to Flight Control [D]. Linkoping: LinkopingUniversity,2013.
[14] CASAVOLA A,CARONE E.Fault-tolerant Adaptive ControlAllocation Scherues for Overactuated Systems [J].lntemationalJournal of Robust and Nonlinear Contr01,2015,20 (17): 1958-1980.
[15]張世杰,趙亞飛,陳閩,過驅動輪控衛星的動態控制分配方法[J].航空學報,2016,32 (7):1260-1268.
[16] ZHONG S,BO L,H Qing-lei,et a/.Dynamic Control AllocationBased-on Robust Adaptive Backstepping Control for AttitudeManeuver of Spacecraft with Redundant Reaction Wheels [C].Control and Decision Conference (CCDO ,2012 24th 23 -25May,Taiyuan, Chinese,IEEE,2012:1354-1359.
