基于自適應遺傳算法的Pl控制在MPPT中的應用研究
2018-04-13 08:28:04龔波周永華
計算技術與自動化 2018年2期
龔波 周永華

摘要:光伏陣列是將太陽能轉化為電能的組合裝置,是光伏發電系統中的核心部分。最大限度利用光伏陣列的輸出能量是光伏發電技術所考慮的重要問題之一。根據硅太陽電池的電氣特性,建立了硅太陽電池的等效數學模型,介紹了傳統電導增量法實現最大功率點跟蹤(MPPT)的基本原理,并針對該方法電壓擾動步長的不足,提出了一種基于自適應遺傳算法的數字PI控制變步長跟蹤方法,通過Matlab/simulink進行S函數建模和仿真,實現了光伏陣列最大功率點(MPP)的跟蹤。仿真結果表明,該控制方法能夠快速準確的跟蹤最大功率點,使系統具有良好的動態性能和穩定性能。
關鍵詞:光伏陣列;MPPT;自適應遺傳算法;PI控制;S函數
中圖分類號:TP18
文獻標識碼:A
1 引言
隨著生態環境的惡化和化石燃料的日漸枯竭,清潔可再生能源的利用變得尤其重要,光伏發電便是其中最具代表的應用。在光伏發電技術中,為了提高光伏陣列輸出能量的利用率,如何快速準確地跟蹤最大功率工作點是所要考慮的重要問題之一。最大功率點跟蹤(MPPT)系統是一種能保持光伏陣列輸出功率始終處于最大值的實時控制系統。在實際運用中,主要的MPPT控制方法有定電壓跟蹤法[1-2]、短路電流比例系數法[3]、擾動觀察法[4-5]、電導增量法[6]和模糊控制[7-9]等。傳統電導增量法,實現起來相對復雜,其電壓擾動步長的選取也比較講究:步長太大,導致系統跟蹤誤差較大,輸出擾動較為明顯;步長太小,則系統跟蹤速度較慢,由此而導致過多的能量損失。本文所提出的方法是一種基于傳統電導增量法的改進型控制方法,主要采用自適應遺傳算法設計數字PI控制器,變步長擾動開關器件IGBT的通斷時間,能夠快速準確地跟蹤光伏陣列的最大功率點,具有良好的動態性能和穩定性能。
2 硅太陽電池數學模型
太陽電池的I-V特性主要與太陽輻照強度G和太陽電池溫度T有關。文獻[10]給出了以單結晶硅為材料的太陽電池等效數學模型。其中幾個重要技術參數:短路電流Isc、開路電壓Voc、最大工作電流Im和最大工作電壓Vm采用產品提供的數據。硅太陽電池輸出電流,和輸出電壓V的等效數學模型表述如下
3 最大功率點跟蹤方法
3.1 電導增量法的基本原理
電導增量法主要是通過擾動光伏陣列的輸出電壓來實現最大功率點的跟蹤,文獻[6]對此有較為詳盡的說明。當dV =0,d,≠0時,說明輻照強度發生變化:如果dI>0,表明輻照強度增加,輸出功率變大,應正向擾動輸出電壓;如果dI<0,表明輻照強度減少,輸出功率變小,應反向擾動輸出電壓;否則,光伏陣列工作在MPP。當dV≠0時,則比較電導的變化量和電導的負值。當光伏陣列工作在MPP左側時,電導的變化量大于電導的負值,應正向擾動輸出電壓;若電導的變化量小于電導的負值,則光伏陣列工作在MPP右側,應反向擾動輸出電壓;否則,光伏陣列工作在MPP。
3.2 電導增量法的改進
分析電導增量法的控制目標,實際上是通過擾動輸出電壓實現電導的變化量等于電導的負值或者滿足條件dV=dI=0。根據光伏陣列的P-D關系曲線(如圖1所示)可知,電導增量法對系統輸出電壓的擾動,可以轉化為對系統控制電路占空比的擾動,最大功率點也將在某一適當的占空比處達到。文獻[11,12]討論了采用數字PID控制方法實現占空比的擾動。在本文中,采用Boost電路作為MPPT的控制電路,通過自適應遺傳算法設計數字PI控制器實現占空比的擾動。
設第k時刻的擾動步長為△D (k),則該時刻的占空比D (k)為第k-l時刻的占空比△D (k-D和△D(k)之和。其中,△D(k)通過增量式數字PI控制算法獲得。圖2所示為改進的電導增量法控制流程圖。
4 控制器設計
4.1 算法設計
由于最大功率點的跟蹤是在占空比的基礎上進行的,控制器只需要獲得合適的占空比增量即可計算出當前時刻應輸出的占空比,因此采用增量式數字PI控制算法。控制器的輸入為電導的變化量和電導的負值之間的偏差信號,輸出為占空比。
增量式數字PI控制算法為
4.2 跟蹤步長靈敏度控制
由電導增量法的工作原理可知,在最大功率點附近時,電導的變化量和電導的負值之間的偏差量接近于零。為保證MPPT系統的跟蹤精度,設定一靈敏度系數A= θ|e(k)| (θ可自由取值),在e(k)|≤1時,AD (k)的實際取值為λ倍D(k)的計算值,使最大功率點附近的跟蹤步長隨系統的跟蹤情況而自適應變化。
5 自適應遺傳算法的應用
遺傳算法是計算數學中一種用于解決最優化問題的隨機化啟發式搜索算法,但標準遺傳算法的最大缺點是對新空間的探索能力有限,容易收斂到局部最優解[13]。本文將采用合作型協同進化的自適應遺傳算法來解決數字PI控制算法中KP和KI的取值問題。
(1)編碼和初始化。變速積分數字PI控制算式中兩個待優化的參數分別為KP和KI,根據經驗以及參數的物理意義,確定它們的取值范圍分別為(0,5)和(0,2)。為便于進行大空間搜索,以提高解的精度和收斂速度,因此采用實數編碼的方式并隨機生成規模為50的初始群體作為迭代優化的初始解。
(2)計算適應度。適應度為遺傳算法迭代過程中的群體進化和最優解的選擇提供了依據。本文選擇適應度函數J= 1/F, F為系統誤差絕對值與控制器輸出的平方項之和的時間積分。
(3)選擇。按照適應度的大小比例來確定個體進入下一代的概率。若當前代最佳個體的適應度大于下一代群體中最佳個體的適應度,則復制當前代的多個最佳個體隨機替代下一代群體中相應數量的最差個體。
(4)交叉和變異。交叉概率pc過大容易破壞優質個體,過小又使算法搜索過程緩慢;變異概率pm過小不利于保持種群多樣性,阻礙算法的全局搜索能力,過大則隨機性太強,不易收斂[13]。因此,適當減小pc和pm有利于保護適應度較高的優質個體直接進入下一代;而采用較大的pc和pm淘汰掉適應度較小的個體[14]。此外,在種群進化初期,多樣性程度較高,適合采用較小的pc和較大的pm以避免優質個體遭到破壞且有利于擴大搜索空間;在進化后期,適合采用較大的pc和較小的pm有利于在最佳區域進行搜索,提高了解的收斂速度和精度。
本文對同一初始種群分別引入兩種不同的交叉變異機制,并采用各代最優解的最優解作為問題解。機制一采用交叉變異概率一,并對交叉變異個體分別進行算術交叉和浮點數均勻變異;機制二采用交叉變異概率二,進化采用單模分布交叉算子和柯西變異。
交叉變異概率一:
(5)第(4)步完成后,在兩種運行機制下將會分別產生一個最佳個體,比較得出兩個個體中的最優個體并存入集合A中,在未達終止進化代數前,將生成的新種群再次按照(2)一(4)進行迭代。迭代結束,比較得出A中的最優個體,送入數字PI控制器,運算結束(流程如圖3所示)。
6 MPPT仿真設計和結果分析
運用上述硅太陽電池數學模型和控制算法,在Matlab/Simulink環境下,分別對天合光能有限公司的TSM-DD14A(II)型光伏組件和數字PI控制器編寫S函數并建立如圖4所示的MPPT仿真模型。仿真用光伏組件在標準測試條件下主要參數為:Isc=9.88 A,Voc=47.3 V,Im=9.35 A, Vm=39.1 V,Pm=365 W。仿真模型主要參數為:CO=100μF,Cl=380 μF,L=16 mH,R=15 Ω。
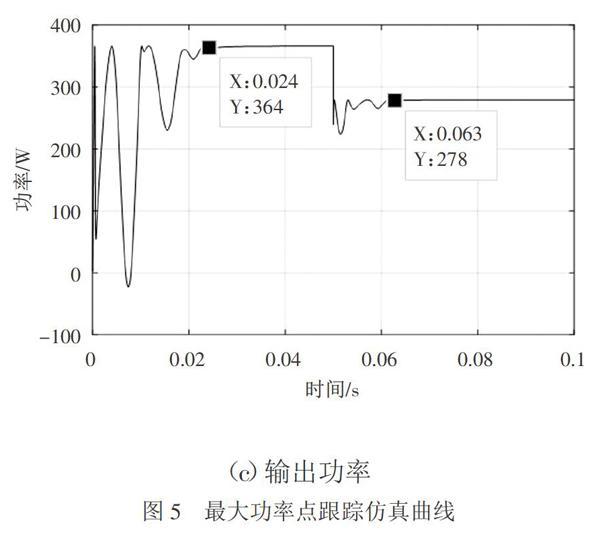
根據TSM-DD14A( II)的產品手冊,為仿真分析方便,設置光伏組件的環境溫度在0.05 s時由一5℃(等效于電池溫度25℃)突變為20℃,輻照強度由1000 W/m2突變為800 W/m2。仿真曲線(輸出電壓、輸出電流和輸出功率)與仿真結果如圖5和表l(相對誤差為仿真實驗值和手冊參考值之間的相對誤差)所示。在環境溫度不變而輻照強度突變時,該仿真設計的跟蹤情況如圖6所示:設置環境溫度為25℃,輻照強度在0.05 s時由800 W/m2突變為700 W/m2。
由以上仿真波形可以看出,經過很短的時間后光伏組件的輸出電壓、輸出電流和輸出功率穩定在最大功率點附近,而且在輻照強度和環境溫度產生突變時能夠快速準確地跟蹤到新的最大功率點,輸出曲線平滑,幾乎沒有波動。此外,光伏組件的最大功率工作點受環境因素影響較大,尤其受輻照強度影響最為明顯。本文是基于自適應遺傳算法來設計的數字PI控制器,其仿真結果與給定數值之間存在少量偏差(相對誤差5%以內),在最大功率點跟蹤的初始階段均有不同程度的尖峰振蕩,這主要與仿真模型的電氣參數和控制算法有關,通過優化算法和改善模型的電氣參數可以得到改善。
綜上,本文針對電導增量法擾動步長的局限性,在此基礎上提出了基于自適應遺傳算法的數字PI控制算法,在Matlab/Simulink環境下進行仿真分析,驗證了所提方法的合理性和有效性。仿真結果表明,該模型可以模擬不同環境條件下的光伏陣列工作情況,所提出的算法能夠實現最大功率點的跟蹤,且具有良好的動態性能和穩定性能。
參考文獻
[1]戴志威,舒杰,吳昌宏.基于環境參數模型的定電壓MPPT控制算法研究[J].電力電子技術,2015,49 (5):61-63.
[2]許潔,劉星橋.基于恒電壓跟蹤法和自適應占空比擾動法的最大功率點跟蹤研究[J].電測與儀表,2016,53 (9):7-12,29.
[3]齊潔瑩,周明,史文秀,等.基于分區域控制法的MPPT研究與仿真D].黑龍江電力,2016,38 (6):529-532,536.
[4] 榮德生,劉鳳.改進型擾動觀察法在光伏MPPT中的研究[J].電力系統及其自動化學報,2017,29 (3):104-109.
[5] CHEN Kai, TIAN Shu-lin, CHENG Yu-hua,et al.A Si-ngle-Phase Single-Stage Grid-Connected Photovolt-aic (PV System[J].China Academic Journal Elect -ronic Publishing House,2015:728-734.
[6]湯濟澤,王叢嶺,房學法.一種基于電導增量法的MPPT實現策略[J].電力電子術,2011,45 (4):73-75.
[7] 萬慶祝,張翊帆.基于模糊控制與自適應步長相結合的光伏發電系統最大功率點跟蹤研究[J].電氣工程學報,2017,l2(3):33-40.
[8]李宏玉,落文斌,呂金淼.基于改進的模糊控制在MPPT系統中的應用[J].自動化與儀器儀表,2017 (3):162-164,168.
[9] YAO Zhi-qing, ZHANG Qian, LIU Xi-mei. Applicationof aFuzzy Self-tuning Pl Controller in a Grid -C -onnected PVGeneration SvstemECl//.lnternational Conference on ICCE2011,AISC 112. Germany:2011:823-834.
[10]蘇建徽,余世杰,趙為,等.硅太陽電池工程用數學模型[J].太陽能學報,2001,22 (4).409-412.
[11]孟蕾,鐘寧帆.一種數字PID控制的擾動觀察法光伏電池MPPT仿真[J].科研發展,2012:77-79.
[12]吳茂.基于數字PID控制的光伏MPPT研究[J].中國教育技術裝備,2012 (9):98-100.
[13]韓瑞鋒.遺傳算法原理與應用實例[M].北京:兵器工業出版社,2010:330-333.
[14]黃友銳,曲立國.PID控制器參數整定與實現[M].北京:科學出版社,2010:28-35.
