基于CAN總線的大型鋼結構網架建筑動態檢測技術研究
2018-04-15 08:04:04王浩周雨王勇王寧
商品與質量 2018年50期
王浩 周雨 王勇 王寧
徐州市質量技術監督綜合檢驗檢測中心 江蘇徐州 221000
1 大型建筑動態檢測應用
大型建筑使用壽命較長,在役期間受環境侵蝕、荷載效應、疲勞效應、突變效應等因素疊加作用,致使其材料、結構產生損傷,而損傷的積累,最終導致重大事故的反生。因此,對大型建筑進行動態檢測及監測,可為鋼結構網架建筑在施工及運營期間安全性提供參考數據[3]。將每個鋼結構健康監測系統作為一個傳感單元,收集多個監測系統協同工作對各種自然災害對這些鋼結構建筑的影響的多個警示結果,利用智能算法進行相互校準,判斷警示結果的有效性和可信度,有利于大型鋼結構設計及施工優化。
大型建筑施工及使用過程中,其結構件因約束和荷載在不同階段而變化,其受力情況較為復雜,施工技術的非標準化,模擬計算預估不足等諸多因素導致結構件損傷,引發較多事故。大型建筑的動態加測,獲取結構件測動態檢測數據,經過數據處理分析,優化施工和設計,為建筑質量評定提供溯源數據。
大型建筑動態檢測監測已廣泛應用于各種大型建筑,例如鋼筋混凝土結構建筑、橋梁和水壩等。實現動態檢測的技術手段,主要是在建筑的柱、梁、拉鎖、壩體布置各種傳感器采集檢測檢測物體的力學參數、運動學參數和外部環境參數。大型建筑動態檢測監測為存在共性的大型建筑提供了施工及維護的參考數據[1]。
2 CAN總線的應用
CAN總線是由以研發和生產汽車電子產品著稱的德國BOSCH公司開發的,并最終成為國際標準(ISO11898),是國際上應用最廣泛的現場總線之一,CAN的高性能和可靠性已被認同,并被廣泛地應用于汽車、自動控制、航空航天、航海、過程工業、機械工業、紡織機械、農用機械、機器人、數控機床、醫療器械及傳感器等領域[5][6]。
2.1 CAN總線的優越性
CAN總線協議已形成國際標準。CAN控制器工作于多主方式,且采用通信數據進行編碼,上述特點使CAN總線各網絡節點之間實時通信性能強、傳輸距離遠、抗電磁干擾能力強和成本降低。CAN總線通過CAN控制器兩個輸出端CANH和CANL與物理總線相連,使網絡節點在錯誤嚴重的情況下具有自動檢錯功能,可以檢測出信號在傳輸中出現的錯誤,從而提高信息傳輸精度和數據傳輸質量。CAN總線可由CAN控制器芯片和接口芯片組合開發,降低了開發難度。CAN總線數據傳輸結構如圖1所示。
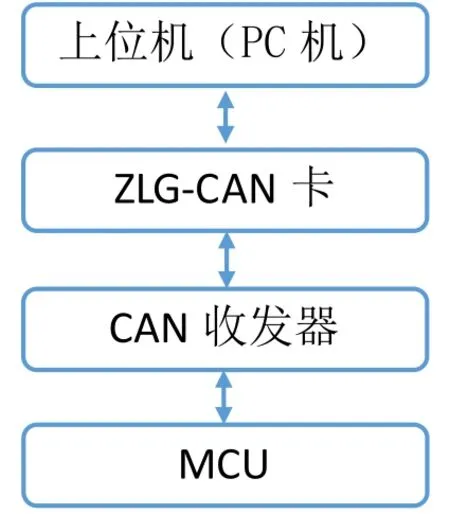
圖1 CAN總線數據傳輸結構圖
大型鋼結構網架建筑動態檢測技術融合結構力學、多傳感器融合和計算機通訊等學科的共融系統工程,目的是為了實現自動化實時連續檢測、監測和識別大型鋼結構網架建筑損傷狀況。
2.2 檢測系統設想
檢測系統集合了數據采集與處理技術,集傳感器、信號采集與轉換、計算機等技術于一體,是獲取信息的重要手段。傳統數據采集系統要使用大量外圍芯片,這需要主處理器控制、鏈接好各模塊以保證各通道的暢通,這樣不但使系統設計體積較為龐大,且開發成本高、設計效率低。為此本設計選擇將A/D轉換器、D/A轉換器、CAN控制器集于一體的C8051F04系列單片機來構建該數據采集系統。通過動態控制模擬輸入與未處理單元進行數據處理和存儲,并采用內部CAN控制器進行數據傳輸和CAN網絡進行通信的方法,大大簡化了設計,使整個系統達到了微小型化。
2.3 檢測系統的設計
檢測系統主要組成包括參數的檢測與處理模塊(傳感器,CAN節點,主控制器)和上位機監控中心兩部分組成,如圖2所示。工作參數的檢測與處理模塊主要負責數據采集、處理、發送。從鋼結構網架建筑結構中提取反映結構特征的參數信息,如擾度、震動頻率、加速度、位移、風速。溫度等信號送入主控制器進行數據處理,然后將處理后的數據按照通信協議封裝后通過現場CAN總線傳送至上位機CAN總線,最后通過串口將采集的信息發送至上位機,上位機對數據進行處理分析,實時顯示各種參數信息,如圖3所示。PC機監控中心負責解析現場發出的數據,并分析數據。
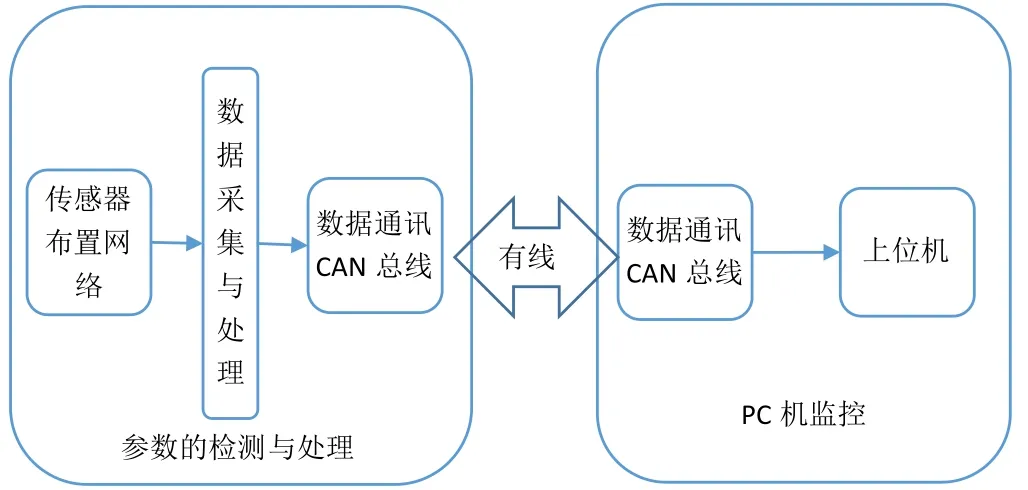
圖2 檢測系統整體結構
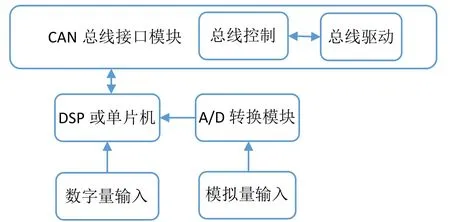
圖3 數據采集硬件結構
2.4 檢測系統的硬件設計
數據的采集與處理,通信模塊的接收和發送是基于英飛凌公司XC2267M微控制進行設計的。XC2267M是一款16/32位單芯片微控制控制器,片上有MultiCAN接口、通用串行接口模塊并且帶有兩個可同步的A/D轉換器,可以提供多達16個通道,完全能夠滿足本系統的要求,信號采集模塊電路如4所示[7]。
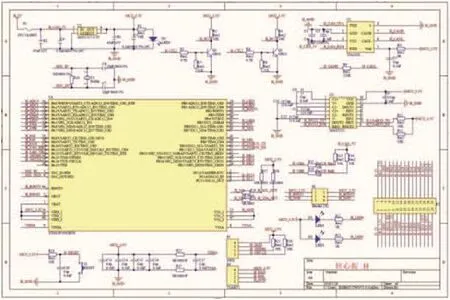
圖4 信號采集模塊電路
(1)模擬量采集電路。以應力應變采集裝置舉例,應力應變采集裝置有應變片、正弦應變計、壓力傳感器等。在檢測系統施工現場,收到檢測結構件、施工條件等因素影響,應力應變檢測需選用各種不同型號傳感器,甚至不同類型的傳感器,數據的傳輸需采用不同串口協議,但傳感器輸出多為電壓/電流輸出,采集模擬量采集電路很好上述問題,另外在A/D轉換之前接入一個電壓跟隨器,可以較好提高帶負載能力,獲得穩定的輸出信號。模擬量采集的部分硬件原理圖如圖5所示。
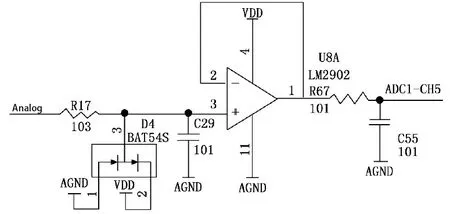
圖5 模擬量采集電路
(2)數字量采集電路。開關信號只有兩種狀態,處理電路相對簡單,如圖5所示。MCU要求的I/O輸入端電壓范圍為0~5V,因此使用肖特基二極管BAT54S進行鉗位處理,即當輸入電壓高于+5V時,將電壓鉗位在+5V,當電壓低于0V時,將電壓鉗位在0V。輸入電壓鉗位后,送入反相器中處理,經反相器再送入MCU。圖6位信號采集模塊電路。

圖6 數字量采集電路
CAN外圍收發器電路
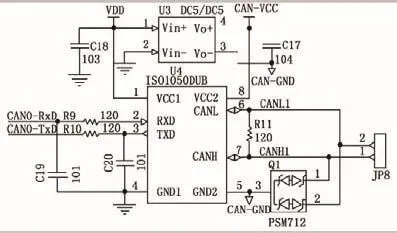
2.5 CAN通信電路
CAN通訊節點由CAN控制器、CAN收發器、終端電阻、防靜電(electro-stanticdischarge,ESD)保護電路組成。微控制器InfineonXC2267集成了MultiCAN模塊,其包含6個全功能CAN節點,每個CAN節點可以獨立工作或者通過網關功能交換數據和遠程幀。CAN總線收發模塊選用T1公司ISO1050DUB,ISO1050DUB是一款電鍍隔離的CAN收發器。該器件可為總線和CAN控制器分別提供差分發射能力和差分接收能力,信號傳輸速率高達1M/s。該器件尤其適合工作在惡劣環境下,其具有串線、過壓和接地損耗保護。CAN通信電路如圖6所示。圖中CAN0-TXD和CAN0-TXD分別對應CAN控制器的發送與接收。ISO1050DUB對電壓穩定度要求很高,選用DY-05S05進行電壓隔離。采用PSM71芯片為其提供保護,防止靜電,三級雷電和開關瞬變。在CAN L和CAN H接入阻值為120Ω的終端保護電阻即圖中R11為120Ω,它增強CAN總線通訊的可靠性與抗干擾能力。圖7為信號采集模塊電路。
2.6 數據采集軟件設計
(1)驅動底層電路,實現對傳感器采集到的信號進行處理。
(2)對采集到的數據,采用中位值平均濾波法進行濾波處理,消除因脈沖干擾引起的采樣偏差。
(3)將濾波處理過的數據進行數據打包處理,然后通過CAN將數據傳輸至上位機數據采集系統上電后,先進行硬件電路的初始化(MAIN_vInit()),然后進行CAN收發器和串口的初始化。CAN接收中斷收到PC端數據發送請求后,通過CAN_vTransmit()發送函數將數據緩沖區的數據以設計好的CAN報文形式發送至PC端CAN節點,CAN通信流程圖如圖7所示。
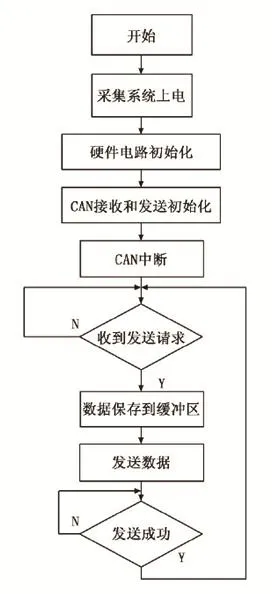
圖7 CAN通信流程圖
監控端軟件是基于VisualC++進行編程,數據接收與處理的部分代碼界面如圖8所示:
圖8 數據接收與處理的部分代碼界面
2.7 數據處理分析
對單傳感器動態信號進行處理分析[2][4],使用傅立葉變換函數,將時域信號轉換單頻域,轉換后的信號所包含的頻率信息則直觀的展現出來,并對其進行功率密度普進行分析。利用多傳感器數據融合處理技術,確定結構件檢測結構。
3 結語
本文提出的大型建筑的動態檢測系統解決了多傳感器兼容性的問題,為在建和在役大型建筑的動態檢測提供了技術手段;大型建筑的動態檢測數據為建筑的建設企業提供施工階段結構的特征數據,有利于施工技術的優化,便于形成標準化的施工流程,同時為建筑的運營單位提供了直觀可靠的安全參數,有利于建筑的維護。
猜你喜歡
北方建筑(2021年6期)2021-12-31 03:03:54
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
鴨綠江(2021年35期)2021-04-19 12:24:18
文苑(2020年10期)2020-11-07 03:15:36
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
現代裝飾(2020年6期)2020-06-22 08:43:12
電子制作(2018年11期)2018-08-04 03:25:42
海峽科技與產業(2016年3期)2016-05-17 04:32:12