基于GPS系統的移動單機走行編碼器自動校正方法
2018-04-15 11:41:42齊凱軒
商品與質量 2018年41期
關鍵詞:信號
齊凱軒
神華黃驊港務公司 河北滄州 061113
黃驊港堆場區域移動單機采用集控操作、自動控制模式,自動程度的提高對單機實時位置的準確性要求特別高,本文針對目前設備現狀提出了可靠的、簡易的、極具推廣價值的方案。
1 黃驊港堆場現狀及其問題描述
隨著自動化技術的不斷推廣完善,目前國家能源集團黃驊港港務公司已實現堆場區域集控操作、現場無人化的階段性成果。為確保生產的安全可靠,實現作業的精細化管理,準確、實時掌握移動單機的各類狀態信息尤為重要,其中移動單機的位置信息是避免臨近單機發生碰撞、避免貨運事故的重要保障也是自動化作業準確運行的基本條件。目前堆場單機基于GPS建立統一的模型管理系統,所有設備在統一的坐標系統中,以實現單機的位置確認。隨著近幾年的運行,其中隱藏的問題逐漸凸顯出來,對自動化作業產生一定影響:編碼器數據由于依賴性降低,對編碼器數據的維護不到位,在GPS數據不可靠的情況下,編碼器數值不夠準確,影響自動作業。
(1)GPS信號采集及使用中存在的問題。GPS基本的定位原理是衛星不間斷地發送自身的星歷參數和時間信息,用戶接收到這些信息后,經過計算求出接收機的三維位置、三維方向以及運動速度和時間信息。每一顆衛星連續不斷地向GPS接收機發送可跟蹤的唯一編碼序列,GPS接收機可根據編碼辨認相關的衛星,進而計算出接收機的確切位置和準確時間[1]。
為建立統一坐標,在黃驊港堆場系統實際應用中,采用的是相對坐標:采用基站、移動站通訊,通過計算獲取用戶所需的坐標值。其基本原理如下:選擇合適地點作為基準站,并在該位置安裝一臺GPS天線接收器,不間斷地進行觀測接收器接收范圍內的所有GPS衛星,并通過相應的通訊設備將其數據實時地發送給各個移動站。各移動站的GPS天線接收器同樣的掃描和接收各GPS衛星信號通過有效的通訊接收基準站傳輸的觀測數據,然后通過計算,建立統一的相對坐標系統,各移動站的位置則實時的顯示出來。
GPS通訊由天線接收器、無線電臺、雙天線平板電腦、串口服務器以及相應通訊線纜組成。通過近幾年的連續工作,目前整體運行穩定,但出現問題后由于故障點不好排查,往往造成較長時間的故障停機,對生產造成一定的影響,其中各移動站故障事件較為突出:
(2)隨著自動化程度的逐步推進,現場設備附屬產品越來越多,天線接收器接收的高頻信號有時會包含其他誤信號,對GPS的精度產生影響。
(3)設備在實際應用中的工作環境并不理想。比如說,目前移動站單機由于軌道不平等一系列原因,各單機移動時會有不同程度的震動現象,GPS系統電器件較多,各接口偶爾出現松動現場導致GPS信號錯誤。
(4)其它未知原因造成的串口服務器死機或者GPS數據變慢情況時有發生。
當出現異常情況時,為保證移動單機能正常工作而不影響生產效率,則需要將準確的編碼器數值進行調用,以保證移動單機不受GPS問題的影響。
2 行走編碼器及使用中存在的問題
絕對值編碼器的位置確定唯一的輸出數值。編碼器的輸出值與位置的起始點和終點有關,而與中間的測量過程沒有關系:在一圈里,每個編碼器的輸出數值對應唯一的數字代碼,編碼器的每一個數字代碼對應的編碼器位置也是唯一的。絕對值編碼器按照使用量程一般又包括單圈編碼器和多圈編碼器。多圈絕對值編碼器生產制作方法是基于單圈絕對值編碼器的:根據鐘表齒輪機械的原理,當中心碼盤旋轉時,通過齒輪傳動另一組碼盤(或多組齒輪,多組碼盤),由此生產廠家利用此方法巧妙的在單圈編碼的基礎上再增加適當圈數的編碼,以擴大編碼器的測量范圍,這樣的絕對值編碼器就稱為多圈絕對值編碼器,它同樣是由機械位置確定編碼,每個位置編碼唯一不重復,從而每一個輸出值都是唯一的,由于數值由機械位置確定所以不會發生因為斷電產生丟失數據的情況。多圈編碼器另一個優點是由于測量范圍大,實際使用往往富裕較多,這樣在安裝時不必要費勁找零點,將某一中間位置作為起始點就可以了,而大大簡化了安裝調試難度[2]。
黃驊港移動單機行走距離較長,多采用多圈絕對值編碼器。根據編碼器通訊方式選擇對應的模塊進行連接通訊獲取編碼器初始值,并通過相應運算,計算出相應的數值。在現場實際的使用過程中,編碼器壽命可達10年以上,出色的使用年限是保證編碼器可靠的必要條件。但是由于編碼器安裝在行走輪的從動輪上面,由于從動輪偶爾會出現受力不均的情況,從動輪有時候會出現多轉或者少轉的情況,導致編碼器出現不同程度的偏差,需要進行校正。以往情況是在行走軌道上,布置用于觸發校正的開關,當單機移動至該位置并觸發此開關后進行校正,其缺點顯而易見:
(1)單機行走過程中通過觸發預定位置的校正開關來校正編碼器數值,由于行走速度、開關響應時間以及程序運算的影響,校正后的位置不夠準確,往往存在半米左右甚至更高的誤差,即便PLC運算中各主管人員添加校正偏差,由于每一次的工況都不盡相同,其結果也不大理想,偏差一直存在。
(2)開關存在誤觸發情況,導致編碼器位置錯誤。
(3)開關數量多,線路較長,損壞后恢復不易。
編碼器的優點以及校正存在的客觀問題,使得港口機械對于編碼器可以說是又愛又恨,既舍不得丟掉,又擔心校正問題出現偏差。
本論文所提供的方法將解決以上問題,確保編碼器數值真實有效。GPS信號作業移動單機行走的常規數據來源,當出現GPS信號問題時,通過PLC控制器用編碼器數據替代GPS數據參與移動單機的自動、手動控制,實現數值間的無間斷投切。本文設計系統由編碼器、GPS系統和PLC控制系統的各硬件設備組成,無需額外添加其他設備,甚至于一定程度上可以精簡其他不必要的檢測裝置,例如布置在單機及其行走軌道上的各校正開關等等。本文設計利用GPS系統,在GPS信號正常情況下,通過計算偏差值來校正行走編碼器,使移動單機能夠在GPS信號異常情況下能自動投切到編碼器數值并保持與原有GPS坐標的一致性,從而保證移動單機能不間斷作業,減少甚至避免因此造成的故障停機,提高移動單機的作業效率。
3 軟件設計與實現
編碼器基于GPS數值校正程序設計思路分為兩種方法,均基于GPS信號正常的情況下。第一種是每月定期校正:當行走命令消失60秒后,在GPS信號(標簽gIN_GPSSignalsValid_OK)正常的情況下,每月1日自動計算一次GPS行走數值與行走編碼器數值的偏差,然后計算編碼器數值與該偏差值數值之和即為校正后的單機位置值。第二種是因其他情況出現較大誤差時的自動校正:移動單機行走結束一分鐘后計算GPS數值與編碼器數值的差值,差值的絕對值在1(可根據實際情況進行調整,以下數值相同)米以內不校正,1到5米之間自動校正,校正的計算方法與第一種方法相同;大于5米或者每天自動校正次數超過2次則不再觸發該校正程序,因為按照編碼器的穩定性來講,一般不會出現頻繁校正或者誤差值突然增大的情況,誤差都是較長時間的累積疊加起來的,出現此種情況該段程序結束執行,并通過HMI報警進行報錯,提醒操作員以及技術人員及時查找原因并解決問題,避免出現編碼器因長時間不使用而不了解其工作狀態的情況。
以上校正方法,通過獲取靜止時候,GPS信號正常下的GPS行走數值來校正移動單機編碼器,有效解決了GPS信號不準的問題以及常規情況下編碼器數值出現偏差的問題。
4 試驗數據分析
為了驗證本方法的可行性,對1號堆取料機進行了長期的數據觀察對比,在GPS信號以及編碼器正常運轉情況下,通過觸發自動校正程序,編碼器與GPS數值的差值始終維持在1米以內,滿足黃驊港堆場單機自動作業條件。
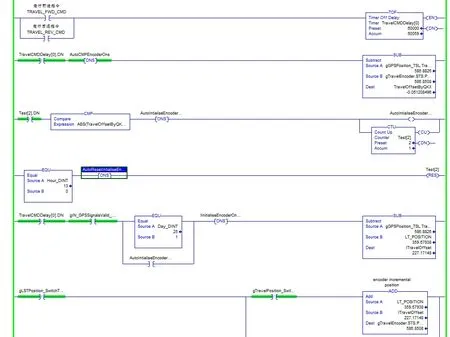
圖1 程序設計圖
5 結語
本論文基于現場現有設備,并對編碼器校正環節進行改進和完善,解決了造成編碼器校正不準的問題,減少了人工的干預程度,提高了設備的自動化程度。
經測試本文設計的移動單機行走編碼器基于GPS的校正方案,很高的準確性,能保證編碼器數值處于待命狀態,當GPS信號異常時可隨時進行投切并投入使用,能有效避免因行走位置不準確造成的故障停機,在保證移動單機持續作業方面具有很高的推廣價值。
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
媽媽寶寶(2019年10期)2019-10-26 02:45:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
鐵道通信信號(2018年11期)2019-01-19 01:15:08
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(2018年2期)2018-04-18 12:18:10
鐵道通信信號(2016年11期)2016-06-01 12:11:32
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
中國病理生理雜志(2015年8期)2015-12-21 12:38:06