主動(dòng)質(zhì)量阻尼器控制方式在電梯振動(dòng)控制中的應(yīng)用研究
2018-04-16 08:35:17俞英杰
裝備機(jī)械 2018年1期
□ 俞英杰
上海三菱電梯有限公司 上海 200245
1 研究背景
隨著電梯運(yùn)行速度越來越快,空氣湍流、導(dǎo)軌不平產(chǎn)生的外部激勵(lì)越來越大,直接導(dǎo)致轎廂內(nèi)振動(dòng)加大,影響乘客乘坐的舒適感[1]。傳統(tǒng)的電梯減振方式主要為在導(dǎo)靴側(cè)或轎廂、轎架間增加彈簧或橡膠等,屬于被動(dòng)減振方式[2-3]。對(duì)于低速運(yùn)行的電梯而言,由于激勵(lì)幅值小,采用被動(dòng)控制方式可以取得顯著的減振效果。但是隨著運(yùn)行速度的加快,外部激勵(lì)幅值大幅增加,傳統(tǒng)被動(dòng)減振控制方式將無法進(jìn)行有效控制[1]。
因此,針對(duì)電梯振動(dòng),要采用主動(dòng)控制方式。主動(dòng)控制方式與電梯的被動(dòng)減振系統(tǒng)無關(guān),通過在電梯系統(tǒng)中引入與激勵(lì)方向相反的主動(dòng)控制力,從而達(dá)到抑制振動(dòng)幅值的作用。
電梯振動(dòng)的主動(dòng)控制主要采用電磁力控制[5-6]和主動(dòng)質(zhì)量阻尼器(AMD)[7]控制兩種方式。AMD控制結(jié)構(gòu)簡(jiǎn)單,成本較低,但響應(yīng)時(shí)間較慢。電磁力控制主要以電磁主動(dòng)導(dǎo)靴的形式進(jìn)行主動(dòng)控制,結(jié)構(gòu)復(fù)雜,成本高,但是由于具有快速響應(yīng)的特性,因此,可以更高效、精確地對(duì)外部激勵(lì)進(jìn)行抑制。
筆者主要探討AMD控制方式,通過簡(jiǎn)化模型、仿真計(jì)算,分析AMD控制方式在電梯振動(dòng)控制中應(yīng)用的效果及可能存在的問題。
2 AMD控制原理
AMD控制結(jié)構(gòu)主要由三部分構(gòu)成:伺服電機(jī)、可動(dòng)質(zhì)量塊、滾珠絲杠。伺服電機(jī)帶動(dòng)滾珠絲杠旋轉(zhuǎn),從而推動(dòng)可動(dòng)質(zhì)量塊沿著滾珠絲杠的軸向方向來回運(yùn)動(dòng)[8-9]。
為了分析AMD控制原理,忽略電梯豎直向與前后向的振動(dòng),將電梯模型簡(jiǎn)化為一維方向的受力模型,如圖1所示。圖1中,M為轎廂系統(tǒng)質(zhì)量,k、c分別為轎廂系統(tǒng)與導(dǎo)靴間的剛度和阻尼,m為AMD控制結(jié)構(gòu)中可動(dòng)質(zhì)量塊的質(zhì)量,X0為導(dǎo)軌處產(chǎn)生的位移激勵(lì),XG為轎廂產(chǎn)生的位移,Xa為AMD系統(tǒng)可動(dòng)質(zhì)量塊產(chǎn)生的位移,θa為伺服電機(jī)產(chǎn)生的滾珠絲杠轉(zhuǎn)動(dòng)角速度,F(xiàn)a為轎廂對(duì)AMD可動(dòng)質(zhì)量塊的作用力,F(xiàn)a’為AMD可動(dòng)質(zhì)量塊對(duì)轎廂的作用力,即主動(dòng)控制力,F(xiàn)W為由導(dǎo)靴處傳入的外部激勵(lì)力。
當(dāng)外部輸入一個(gè)位移激勵(lì)X0,使整個(gè)轎廂受到一個(gè)向右的力FW,進(jìn)而產(chǎn)生了位移XG。如果此時(shí)安裝在支撐框架上部的AMD動(dòng)作,使可動(dòng)質(zhì)量塊也產(chǎn)生一個(gè)位移量Xa,Xa=XG+XF,XF為由伺服電機(jī)推動(dòng)可動(dòng)質(zhì)量塊相對(duì)于轎廂運(yùn)動(dòng)其中產(chǎn)生的位移,可動(dòng)質(zhì)量塊受到伺服電機(jī)產(chǎn)生的推力同時(shí)由于反作用力的關(guān)系,轎廂系統(tǒng)受到一個(gè)反向的力與外部的激勵(lì)力FW方向相反,從而可以起到抑制轎廂系統(tǒng)振動(dòng)的作用。
對(duì)于外部的位移激勵(lì)信號(hào)X0,通過求解力平衡方程,可以得到相應(yīng)的主動(dòng)控制力通過聯(lián)立伺服電機(jī)的回轉(zhuǎn)運(yùn)動(dòng)方程,可以得到伺服電機(jī)電壓U、轎廂加速度響應(yīng)的關(guān)系。因此,可以通過控制伺服電機(jī)達(dá)到抑制轎廂振動(dòng)的目的[10-11]。
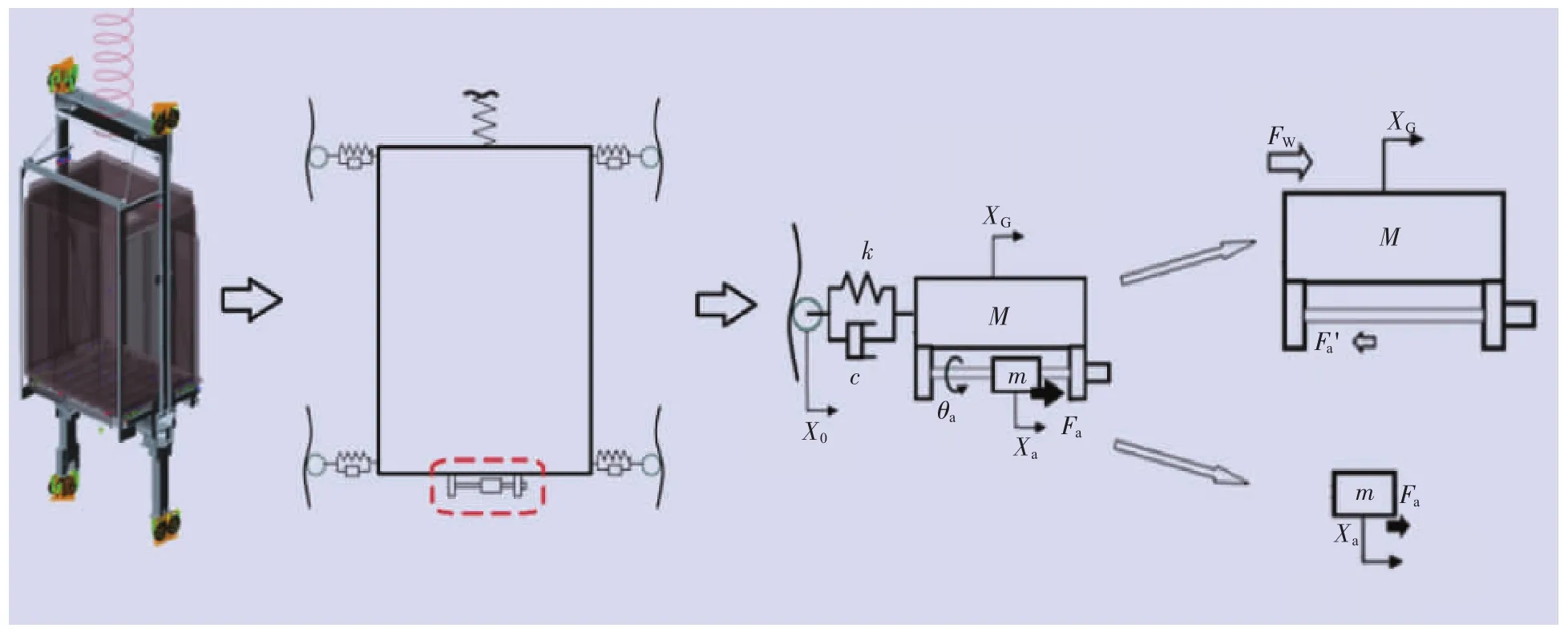
圖1 電梯受力模型
3 仿真計(jì)算
3.1 模型簡(jiǎn)化
應(yīng)用MSCADAMS軟件,建立簡(jiǎn)單的仿真模型,如圖2所示。將支撐框架和轎廂室的質(zhì)量相加,簡(jiǎn)化為一體,即圖2中大方塊部分。將導(dǎo)靴視為一體,即圖2中小方塊部分。在導(dǎo)靴側(cè)采用位移激勵(lì),模擬由于導(dǎo)軌不平產(chǎn)生的橫向激勵(lì)。
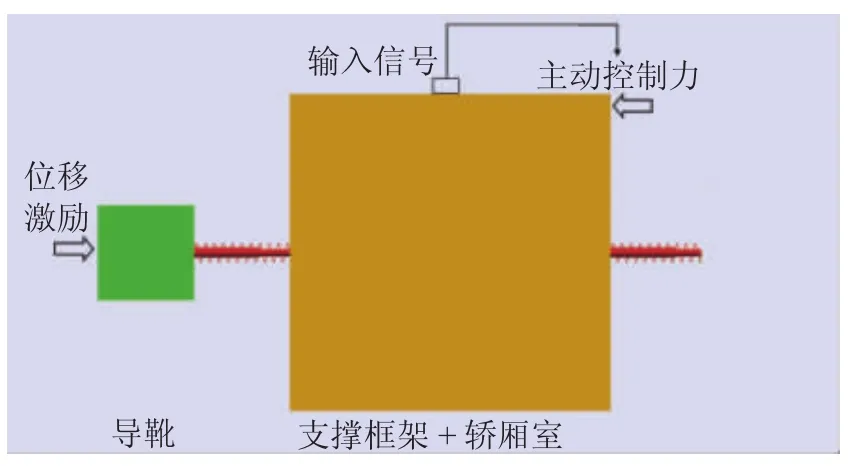
圖2 MS CADAMS簡(jiǎn)單仿真模型
3.2 輸入信號(hào)相位影響分析
采用單頻正弦信號(hào)作為激勵(lì),主動(dòng)控制力分別采用與輸入信號(hào)同相位、反相位,計(jì)算結(jié)果如圖3~圖6所示。
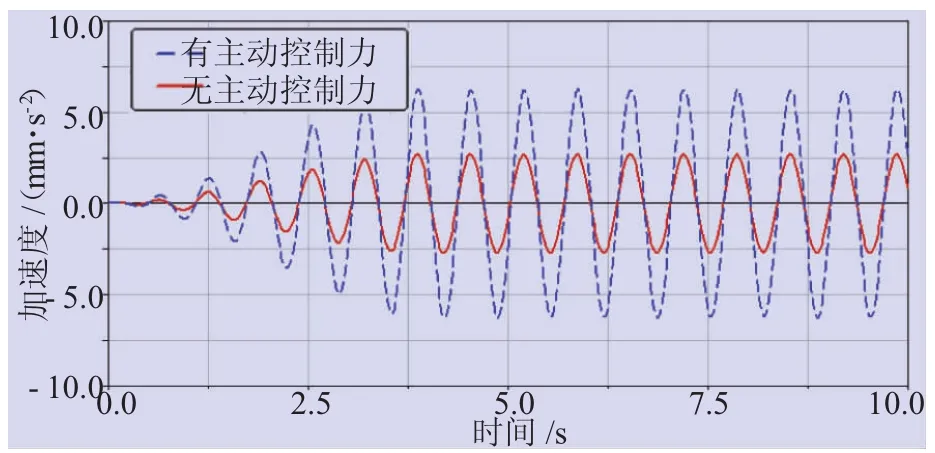
圖3 主動(dòng)控制力與輸入信號(hào)同相位時(shí)加速度響應(yīng)曲線
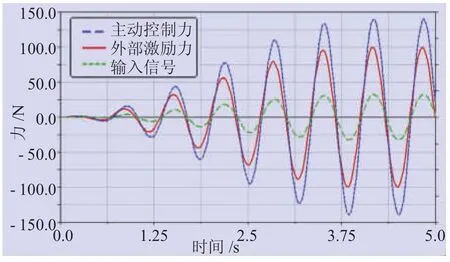
圖4 主動(dòng)控制力與輸入信號(hào)同相位時(shí)對(duì)比曲線
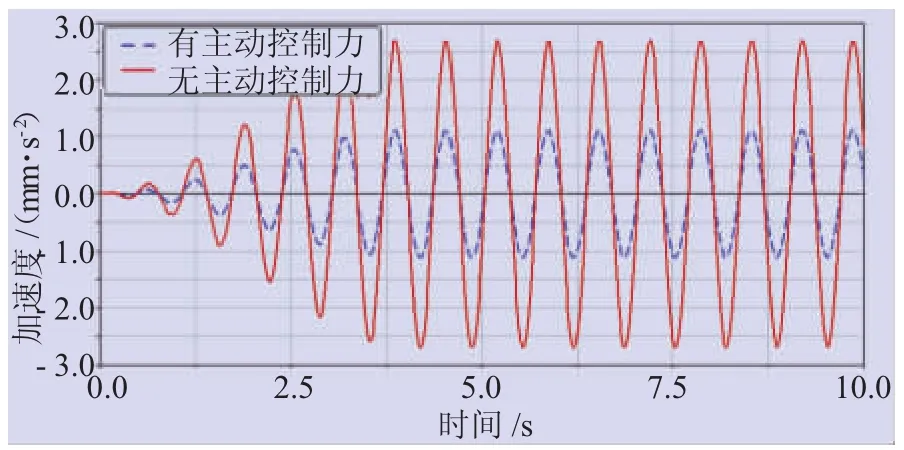
圖5 主動(dòng)控制力與輸入信號(hào)反相位時(shí)加速度響應(yīng)曲線
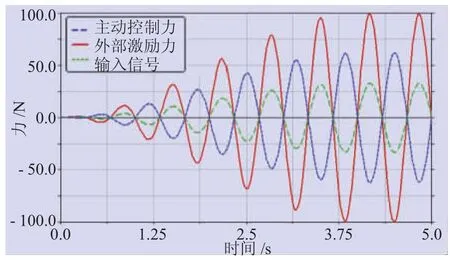
圖6 主動(dòng)控制力與輸入信號(hào)反相位時(shí)對(duì)比曲線
由圖3~圖6可知,主動(dòng)控制力與輸入信號(hào)同相位時(shí),主動(dòng)控制力與外部激勵(lì)力也為同相位,從而導(dǎo)致振動(dòng)被進(jìn)一步放大。主動(dòng)控制力與輸入信號(hào)反相位時(shí),主動(dòng)控制力與外部激勵(lì)力也為反相位,實(shí)時(shí)抵消外部激勵(lì)的影響,轎廂室的振動(dòng)幅值明顯下降。
由于AMD的可動(dòng)質(zhì)量塊由伺服電機(jī)所驅(qū)動(dòng),因此當(dāng)外部激勵(lì)頻率較高時(shí),相位不斷變化,為了抵消外部激勵(lì),所輸出力的相位也要隨之變化。此時(shí),伺服電機(jī)的響應(yīng)速度有可能無法跟上外部激勵(lì)的相位變化,反而有可能造成振動(dòng)幅值的增大。可見,AMD控制結(jié)構(gòu)的響應(yīng)速度,即伺服電機(jī)的響應(yīng)速度是影響AMD控制效果的重要因素。
3.3 主動(dòng)控制力大小影響分析
主動(dòng)控制力大小對(duì)轎廂減振效果有很大的影響。如圖7、圖8所示,改變控制因數(shù)α,主動(dòng)控制力與外部激勵(lì)力的大小越接近時(shí),系統(tǒng)所受到的合力越小。根據(jù)公式可知,合力FW+Fa越小,轎廂系統(tǒng)的加速度也就越小。由此可以發(fā)現(xiàn),AMD控制的本質(zhì)就是通過主動(dòng)控制力抵消外部激勵(lì)力的影響,從而達(dá)到減振的目的。如果主動(dòng)控制力過大,則可能成為新的激勵(lì)源,使振動(dòng)變大。
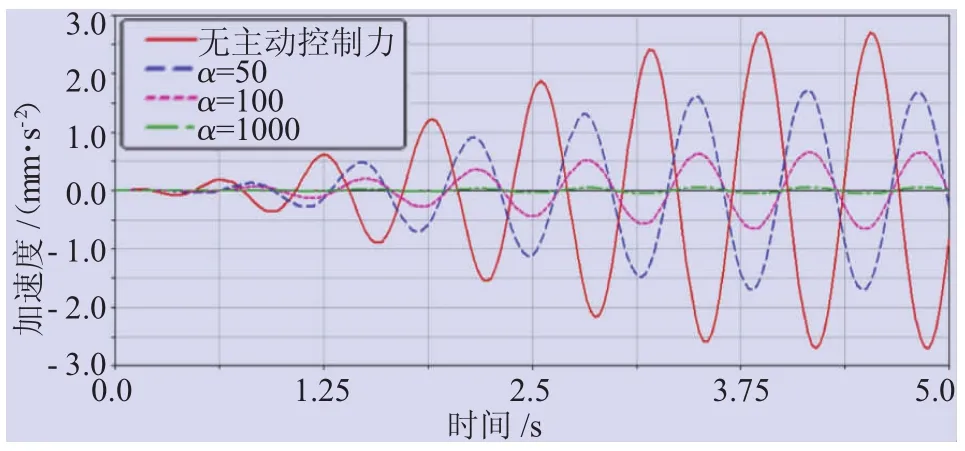
圖7 不同控制因數(shù)時(shí)加速度響應(yīng)曲線
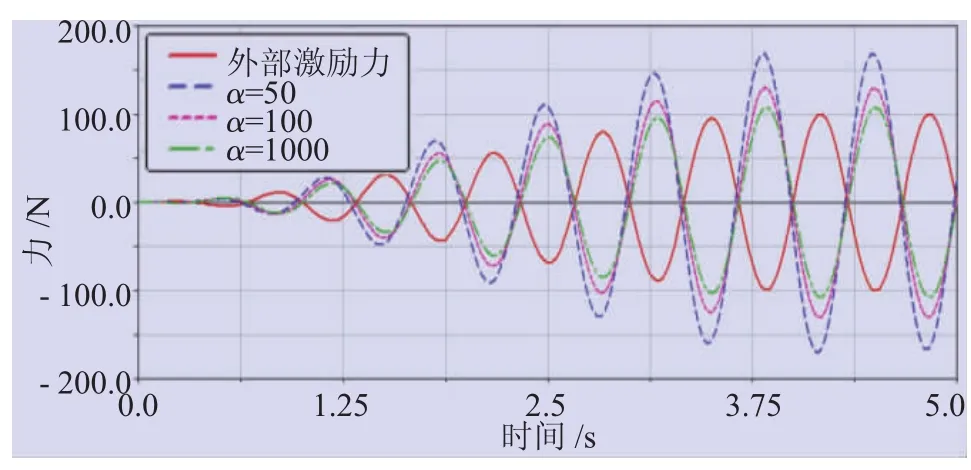
圖8 不同控制因數(shù)時(shí)外部激勵(lì)力與主動(dòng)控制力對(duì)比曲線
3.4 位移隨機(jī)激勵(lì)仿真計(jì)算
采用位移隨機(jī)激勵(lì)輸入,再次進(jìn)行仿真,分析在振動(dòng)幅值、頻率、相位隨機(jī)變化時(shí),采用AMD控制轎廂的振動(dòng)響應(yīng)情況,如圖9~圖12所示。
當(dāng)主動(dòng)控制力和輸入信號(hào)為同相位時(shí),主動(dòng)控制力與外部激勵(lì)力為同相位,且不發(fā)散,此時(shí)情況與正弦信號(hào)激勵(lì)時(shí)不同,加速度響應(yīng)幅值不僅沒有增大,而且反而有所衰減。
當(dāng)主動(dòng)控制力和輸入信號(hào)為反相位時(shí),主動(dòng)控制力與外部激勵(lì)力為反相位,主動(dòng)控制力抵消外部激勵(lì)力,使轎廂室的加速度響應(yīng)幅值有大幅度下降。當(dāng)外部激勵(lì)力很小時(shí),只需要給予一個(gè)很小的力,便可以取得很好的減振效果。當(dāng)外部激勵(lì)力很大時(shí),只需要增大AMD可動(dòng)質(zhì)量塊的質(zhì)量和伺服電機(jī)的輸出功率,同樣可以取得很好的減振效果。
主動(dòng)控制的實(shí)質(zhì)是力的抵消,即通過主動(dòng)控制力抵消外部激勵(lì)力。根據(jù)圖9~圖12,當(dāng)最后系統(tǒng)趨于穩(wěn)定,由于偏載作用而存在一個(gè)恒定靜力并導(dǎo)致系統(tǒng)位移不為0時(shí),若要AMD控制結(jié)構(gòu)仍然提供一個(gè)反方向的控制力,這顯然是不可實(shí)現(xiàn)的。AMD控制本質(zhì)是由伺服電機(jī)推動(dòng)可動(dòng)質(zhì)量塊時(shí)產(chǎn)生對(duì)支撐框架的反作用力,由于可動(dòng)質(zhì)量塊的行程有限,這一反作用力不可能恒久存在,因此采用位移控制,對(duì)于偏載情況顯然會(huì)出現(xiàn)可動(dòng)質(zhì)量塊超出行程的問題。可見,在采用位移控制時(shí),控制因數(shù)α不能為一個(gè)常數(shù),應(yīng)該在系統(tǒng)接近穩(wěn)定時(shí)使控制因數(shù)α變?yōu)?。
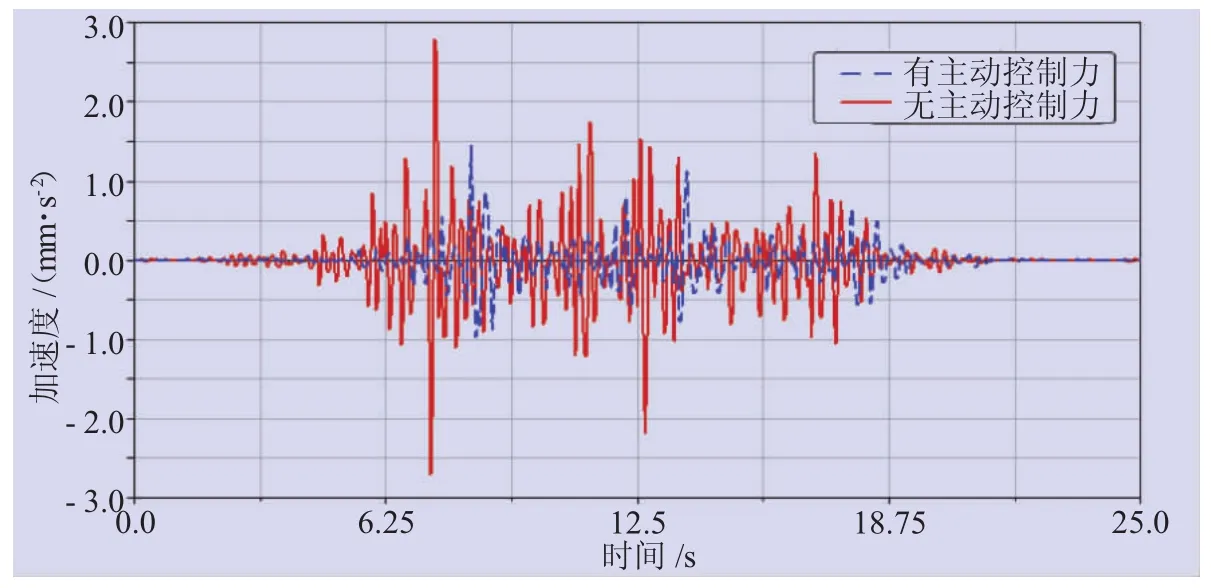
圖9 位移隨機(jī)激勵(lì)下主動(dòng)控制力與輸入信號(hào)同相位時(shí)加速度響應(yīng)曲線
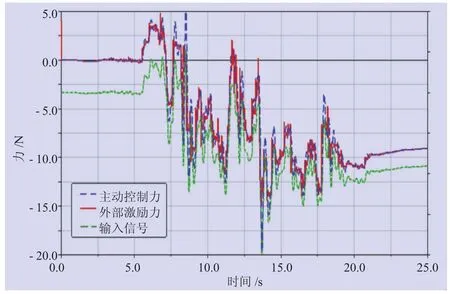
圖10 位移隨機(jī)激勵(lì)下主動(dòng)控制力與輸入信號(hào)同相位時(shí)對(duì)比曲線
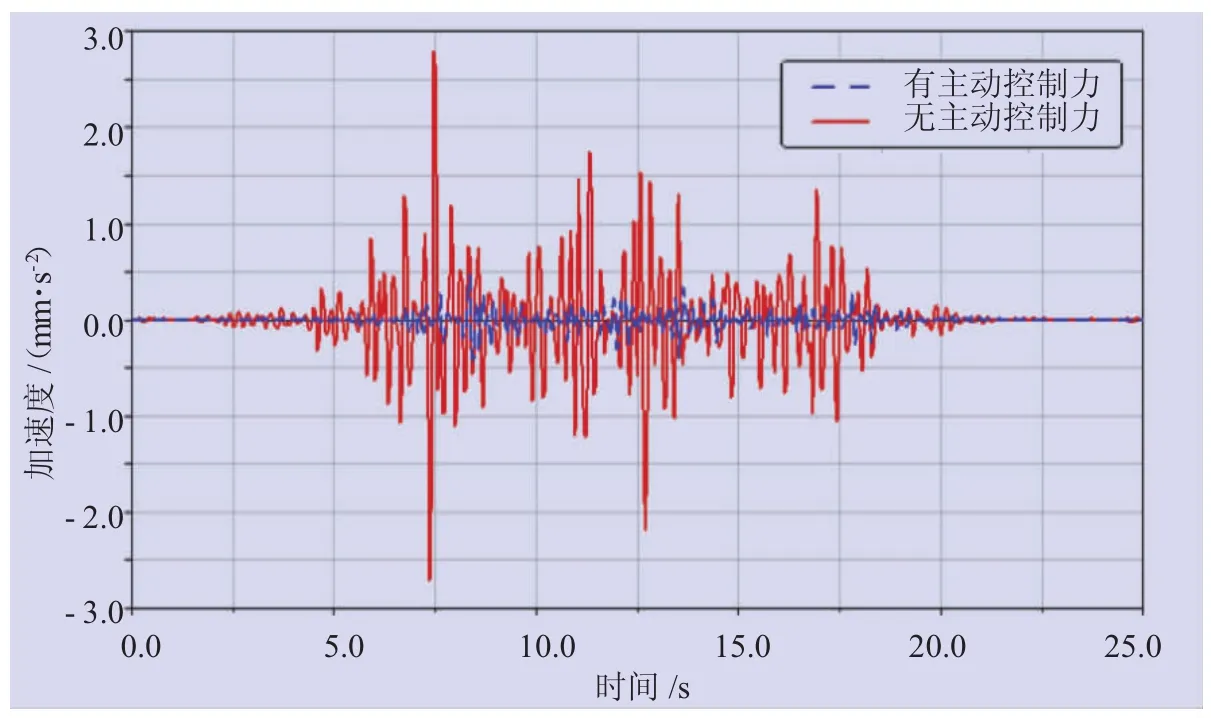
圖11 位移隨機(jī)激勵(lì)下主動(dòng)控制力與輸入信號(hào)反相位時(shí)加速度響應(yīng)曲線
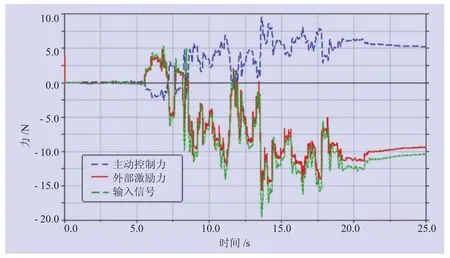
圖12 位移隨機(jī)激勵(lì)下主動(dòng)控制力與輸入信號(hào)反相位時(shí)對(duì)比曲線
4 總結(jié)
AMD控制的本質(zhì)是用一個(gè)主動(dòng)控制力來抵消外部激勵(lì)力,從而抑制轎廂系統(tǒng)的振動(dòng)響應(yīng),達(dá)到減振的目的。改變控制因數(shù),使主動(dòng)控制力與外部激勵(lì)力的大小越接近,系統(tǒng)所受到的合力就越小,系統(tǒng)的振動(dòng)響應(yīng)幅值也就越小。
AMD可動(dòng)質(zhì)量塊由伺服電機(jī)驅(qū)動(dòng),當(dāng)外部激勵(lì)頻率較高時(shí),相位迅速發(fā)生變化,為了抵消外部激勵(lì),所輸出力的相位也要隨之變化。此時(shí),伺服電機(jī)的響應(yīng)速度有可能無法跟上外部激勵(lì)的相位變化,進(jìn)而有可能造成振動(dòng)幅值的增大。
當(dāng)采用反相位輸入信號(hào)進(jìn)行控制時(shí),主動(dòng)控制力與外部激勵(lì)力方向相反,可以有效抑制轎廂系統(tǒng)的振動(dòng)幅度。
對(duì)于位移輸入控制,當(dāng)系統(tǒng)最后由于偏載作用而存在一個(gè)恒定靜力并導(dǎo)致系統(tǒng)的位移不為0時(shí),AMD控制結(jié)構(gòu)為了抵消由于偏載而產(chǎn)生的作用力,仍然需要提供一個(gè)恒定的反方向控制力。由于AMD控制結(jié)構(gòu)的行程有限,通過慣性力來提供一個(gè)恒定力顯然是不可實(shí)現(xiàn)的。因此,在采用位移控制時(shí),控制因數(shù)不能為一個(gè)常數(shù),應(yīng)該在系統(tǒng)接近穩(wěn)定時(shí)使控制因數(shù)逐漸變?yōu)?。
[1] 馬燁.高速電梯氣動(dòng)特性研究[J].裝備機(jī)械,2013(2):47-48.
[2] 吳慧,葉文華,沈言,等.高速電梯垂直振動(dòng)建模與實(shí)驗(yàn)分析[J].機(jī)械制造,2013,51(4):19-22.
[3] 王磊,馮永慧,薛金蓮.基于Aduc7026的高速電梯液壓主動(dòng)導(dǎo)靴控制系統(tǒng)設(shè)計(jì)[J].機(jī)械制造,2011,49(7):25-29.
[4] 嚴(yán)濟(jì)寬.機(jī)械振動(dòng)隔離技術(shù)[M].上海:上海科學(xué)技術(shù)文獻(xiàn)出版社,1986.
[5]廖小波.高速電梯水平振動(dòng)實(shí)驗(yàn)系統(tǒng)設(shè)計(jì)及主動(dòng)控制仿真研究[D].上海:上海交通大學(xué),2005.
[6]NOGUCHI N,ARAKAWA A,MIYATA K,et al.Study on Active Vibration Control for High-Speed Elevators[J].Journal ofSystemDesign and Dynamics,2011,5(11):164-179.
[7] 豊嶋順彥,上村晃生,永井正夫,その他.AM Dによる超高速エレベータの振動(dòng)制御(第1報(bào),最適制御理論による検討)[J].日本機(jī)械學(xué)會(huì)論文集(C編),1999,65(637):3479-3485.
[8] 豊嶋順彥,上村晃生,永井正夫,その他.AM Dによる超高速エレベータの振動(dòng)制御(第2報(bào),実機(jī)模擬試験)[J].日本機(jī)械學(xué)會(huì)論文集(C 編),2000,66(647):2181-2186.
[9]劉川.直線電磁驅(qū)動(dòng)AMD主動(dòng)減振控制系統(tǒng)的研究[D].哈爾濱:哈爾濱工業(yè)大學(xué),2007.
[10]卞永明,金曉林,泰利升.集裝箱橋吊吊具的電子主動(dòng)防搖裝置試驗(yàn)研究[J].振動(dòng)、測(cè)試與診斷,2005,25(4):292-295.
[11]徐洋,華宏星.AMD結(jié)構(gòu)主動(dòng)控制系統(tǒng)的建模研究[J].振動(dòng)與沖擊,2008,27(5):79-80.
[12]李惠,鈴木祥之,吳波.AMD控制結(jié)構(gòu)地震反應(yīng)的試驗(yàn)研究[J].振動(dòng)工程學(xué)報(bào),1999,12(2):223-228.
[13]馮永慧,張建武.高速電梯水平振動(dòng)模型的建立與仿真[J].上海交通大學(xué)學(xué)報(bào),2007,41(4):557-560.
猜你喜歡
科學(xué)大眾(2023年17期)2023-10-26 07:39:14
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評(píng)價(jià)·高一版(2020年6期)2020-11-02 02:45:24
天天愛科學(xué)(2020年6期)2020-09-10 07:22:44
電子制作(2018年11期)2018-08-04 03:25:42
小學(xué)生學(xué)習(xí)指導(dǎo)(低年級(jí))(2018年3期)2018-01-31 02:18:58
數(shù)學(xué)物理學(xué)報(bào)(2017年6期)2018-01-22 02:26:40
小學(xué)生時(shí)代·綜合版(2016年7期)2016-05-14 17:53:49
鑿巖機(jī)械氣動(dòng)工具(2016年3期)2016-03-01 04:00:25
小說月刊(2015年4期)2015-04-18 13:55:18
