三維自動進樣系統的結構設計與運動學分析
2018-04-18 10:35:35何德何毅斌李晶
機械 2018年3期
何德,何毅斌,李晶
三維自動進樣系統的結構設計與運動學分析
何德,何毅斌*,李晶
(武漢工程大學 機電工程學院,湖北 武漢 430074)
數字PCR設備三維自動取樣系統是完成數字PCR檢測儀設備核心結構。根據電子設備高精密度和緊促性要求,以絲桿步進電機與滑動導軌相結合的驅動設計方式能夠有效提高機器工作精度、降低運動噪音。取樣針采用雙層結構設計,使設備能夠有效實現無污染反復取樣,并能夠實現自動清洗。利用多剛體運動學理論,通過ADAMS軟件完成三維運動系統的運動學仿真,結果證明了系統運行的精密性和可靠性,運動能滿足要求。
數字PCR檢測儀;自動進樣;取樣針;ADAMS
數字PCR檢測技術作為最新一代聚合酶鏈式反應(Polymerase Chain Reaction,PCR)技術,對生物基因檢測不依賴標準曲線而能達到絕對定量、實驗精度高,在基因檢測領域有巨大應用前景。三維取樣系統的設計與研究是重要環節,本文設計以絲桿步進電機與滑動導軌相結合方式、結構緊促、精密度高的三維取樣進樣系統,采用雙層取樣針實現采樣的反復進行。對其結構進行運動仿真,得出取樣針各個方向位移、加速度的變化,驗證滿足設計要求。
1 三維取樣平臺的結構設計
1.1 驅動方式選擇
目前實現三維機構傳動目前主要有三種方式[1]:步進電機與皮帶輪(同步輪)設計;絲桿步進電機(伺服電機)與直線滑動導軌;兩種方式混合使用。絲桿電機通過脈沖信號控制電機運動,能保證運動的穩定性和高精度要求。同時由于電機運動路程較短,采用絲桿步進電機作為系統的驅動力,直線導軌相比于皮帶輪傳動平穩性更高,更能滿足系統的高精度要求。因此,選用本設計選用絲桿步進電機和直線滑動導軌的驅動方式,來控制三維系統的運動。
1.2 取樣針的設計
取樣針是取樣系統的核心部件,取樣針通過連接件固定在軸運動方向上,為保證取樣的反復進行,設計為內層和外層的雙層針(圖1),內層用于取樣,外層主要用于取樣完成后通清洗液清洗取樣針內層外壁、以防止試劑間的相互干擾。工作時,內層連接負壓機構進行負壓取樣,取樣完成后,外層連接正壓機構通清洗液對取樣針內層外壁進行清洗。取樣針內外壁保持光潔,焊接處選用A022不鑄鋼焊絲,焊接完成后拋光處理。取樣針外層使用PTFE鍍層加工和金屬渡層加工,PTFE渡層加工可增強防水性、減少交叉污染。取樣針內層內外徑為0.6 mm和1 mm,外層內外徑為1.4 mm與1.8 mm。材料選用316L不銹鋼,具有很好的防腐蝕性能。取樣針零件如圖1所示。
1.3 主體結構設計
運動平臺采用組裝式原則,、、三個方向相互垂直,根據運動范圍確定軸機構設計,再確定軸,最后確定軸。通過有序設計和計算保證設計過程合理性與可靠性,所以從下至上三個方向上主動件和從動件的運動方式可設定為笛卡兒坐標系中的、、三軸向。由于三軸的裝配關系直接影響整體運行的精度,故各部件的接觸表面都要求保持相應的精度。通過三維取樣平臺的驅動系統,、、軸電機與滑動導軌分別控制整個機構的、、運動。絲桿連接末端通過彈性管套連接,降低系統運行時的震動強度。連接取樣針軸臂上有壓力傳感器,當針頭壓力過大時可通過壓力傳感器反饋使整個機器停止工作。在每個軸的運動方向上,通過槽式光電開關確定零點位置,通過限位柱限定系統的最大運行路程,防止系統出現故障而產生更大的破壞,從而實現機構通過三維空間的任意位置。整體結構如圖2所示。
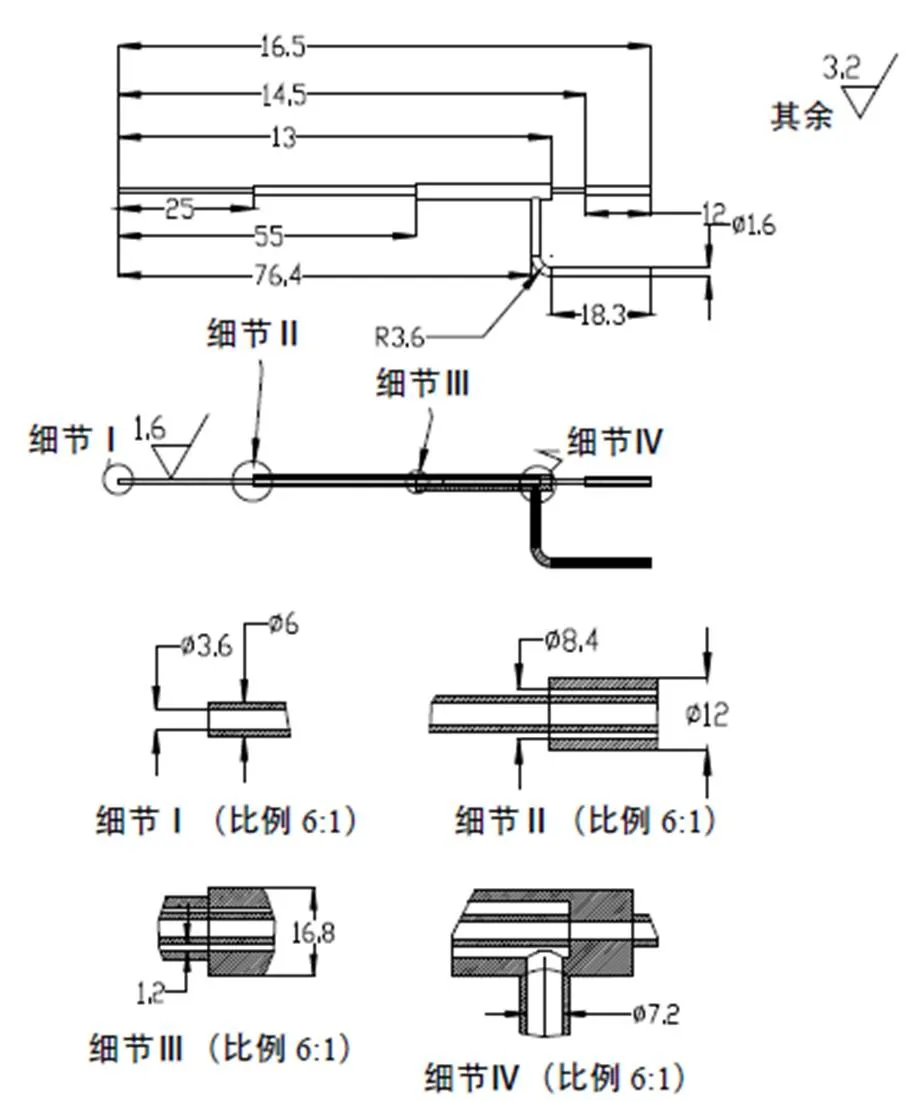
圖1 取樣針零件圖

圖2 三維運動機構整體結構圖
2 基于ADAMS的運動學仿真
2.1 三維運動機構仿真模型的建立
做運動學仿真之前需構件物理模型,通過對部分零部件進行一定抽象和簡化,將固定螺栓和不重要零件去掉,為構建運動學模型提供實體模型。在Creo軟件中輸出.X_T文件導入ADAMS。多剛體系統運動學模型中部件(part)的定義并不一定要與實際工程零部件一一對應,通常只將與運動形態密切相關的零部件定義為部件,而與運動無關的零部件通過合并操作進行組合形成一個構件,從而減少整個運動系統的構件數,以降低運動學模型的復雜程度[2]。
主要步驟為:①定義材料屬性,選擇材料為steel;②重命名部件;③將相對位置不變的零部件創建固定副,在電機軸與固定板上創建圓柱副、在滑動導軌上創建移動副;④在移動副上添加驅動,設置驅動函數;⑤設置求解器。
三維運動機構多剛體運動學模型[3]中所有的零部件都是采用不會變形的剛體,通過運動副的相互約束將處于自由狀態的零部件連接構具有相對運動關系的機構,并設置滑移副、旋轉副等運動副的主從運動關系,設置固定副固定元件,最后通過添加驅動使得整個的機構自由度為0。
2.2 多剛體運動機構仿真
由實際工作過程可知,三維運動平臺需要、、三個方向上的運動,需要三個運動控制 Motion來實現,通過測量取樣針到達取樣點三個方向的距離,確定、、三個方向的運動距離。、方向同時進行,到達取樣點上方后再移動軸。通過驅動程序控制電機的運行速度和時間,三維機構運動參數如表1所示。
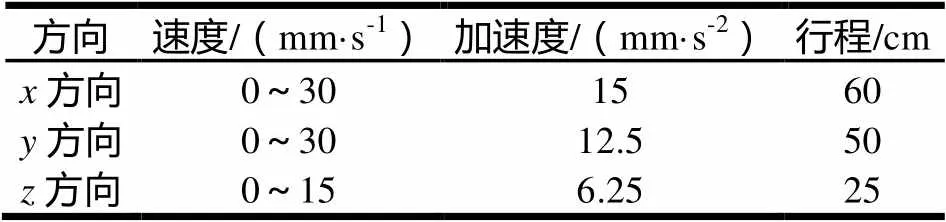
表1 三維機構運動參數
將運動參數方程輸入Motion中,模擬一個完整取樣過程,選擇GSTIFF積分器進行求解,通過后處理,選擇最后分析,選擇結果分析,選擇取樣針,分量選擇速度和加速度,得出取樣針的加速度和位移曲線如圖3所示。可知,在18 s的一個取樣流程內,取樣針沿軸方向往復運動60 mm、沿軸方向往復運動50 mm、沿軸方向往復運動25 mm,剛好完成一層完整的取樣,加速度分別為15 mm/s2、12.5 mm/s2、6.25 mm/s2。由唯一曲線可知在8~10 s時間段內,、、方向位置沒有發生變化,取樣針在定點取樣,運動仿真過程滿足需求。
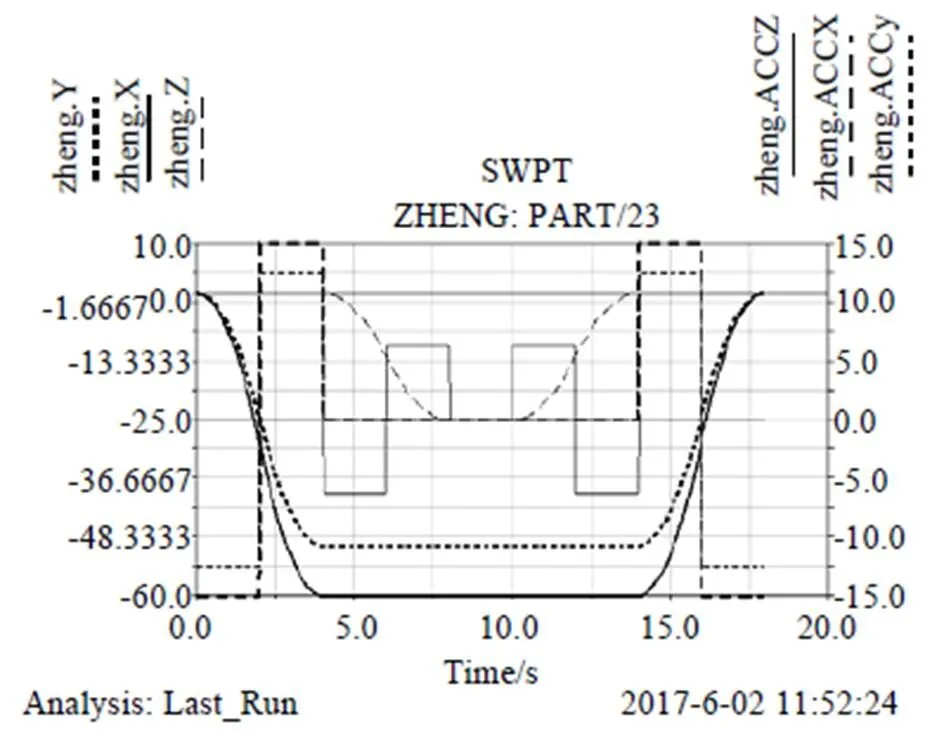
圖3 取樣針加速度與位移仿真圖
3 小結
雙層取樣針的設計能夠很好地滿足重復進樣而又不會帶來污染,光電傳感器和限位柱的使用能夠保證運動精度的準確性,通過以絲桿步進電機和直線滑動導軌為驅動部件的三維取樣平臺滿足了取樣系統的高精度需求。最后通過ADAMS運動學仿真,反應出了運動的真實工作情況,與實驗預期結果相同,驗證了三維自動取樣系統的可靠性,滿足了設計要求。
[1]莫易敏,魏麗娜,姜宏霞,等. 微型汽車離合器操縱機構傳動比的研究[J]. 機械研究與應用,2009,3(2):26-28.
[2]李堅. 單立柱有軌巷道式堆垛機結構及多體系統動態仿真分析[D]. 重慶:重慶大學,2006.
[3]呂博. CT-SIM激光燈定位系統的設計研究[D]. 沈陽:沈陽建筑大學,2011.
Structural Design and Kinematics Analysis of 3D AutoSampling System
HE De,HE Yibin,LI Jing
(School of Mechanical and Electrical Engineering, Wuhan Institute of Technology, Wuhan430074 , China )
Digital PCR equipment, three-dimensional automatic sampling system is to complete the core structure of the PCR detector device, according to the high precision of electronic equipment and tightening requirements, to study the screw stepper motor and sliding guide combination of drive design, can effectively improve Machine work accuracy, reduce movement noise. Sampling needle with double-layer structure design, so that equipment can effectively achieve repeated pollution-free sampling, and can achieve automatic cleaning. The kinematic simulation of the three - dimensional motion system is completed by ADAMS software. The results show that the system is accurate and reliable, and the kinetic energy can meet the requirements.
digital PCR detector;autosampling;sampling needle;ADAMS
TP216
A
10.3969/j.issn.1006-0316.2018.03.011
1006-0316 (2018) 03-0043-03
2017-06-12
何德(1992-),男,湖北咸寧人,工學碩士,主要研究方向為生物分析儀器。
何毅斌(1966-),男,湖北武漢人,工學博士,教授,主要研究方向為機械設計仿真及輕量化。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
計算機應用(2022年2期)2022-03-01 12:33:42
計算機應用(2021年4期)2021-04-20 14:06:36
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
計算機應用(2021年1期)2021-01-21 03:22:38
北京測繪(2020年12期)2020-12-29 01:33:58
藝術啟蒙(2018年7期)2018-08-23 09:14:18
家庭影院技術(2017年9期)2017-09-26 03:41:45
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16