白蘆筍選擇性收獲機末端執行器作業分析與試驗
2018-04-19 00:37:10劉雪美鄒亮亮
農業機械學報 2018年4期
劉雪美 杜 帥 苑 進 李 揚 鄒亮亮
(1.山東農業大學機械與電子工程學院, 泰安 271018; 2.山東省園藝機械與裝備重點實驗室, 泰安 271018)
0 引言
白蘆筍為多年生草本植物,營養價值比一般蔬菜高5倍以上,具有抗癌保健功效,被譽為“蔬菜之王”。我國是蘆筍種植大國,收獲面積占全球的90%,但以人工采收為主。白蘆筍需在筍尖剛出土時挖土收獲,因其采收時間為早上或傍晚,采收時間比較集中,人工采收工作量大、效率低[1]。白蘆筍的選擇性、高效、低損傷的采收要求已成為制約我國蘆筍產業發展的瓶頸。
近年,國內外針對白蘆筍收獲已經開展了相關技術研究[2-5],國內白蘆筍采收多為人工手持采筍刀收獲,勞動強度大,效率低;國外現有的白蘆筍收獲機為一次性收獲,即不區分蘆筍生長狀況、筍芽長度,從根部將其一次性切割。由于現有機械為一次性采收,破壞性強,損傷率高,大大降低了蘆筍產量。基于此,項目組提出了一種白蘆筍選擇性收獲機,依靠末端執行器扎入土壤,將白蘆筍切斷,夾住并帶出土壤,完成采收動作。由于蘆筍脆嫩、易折斷的特點,增加了末端執行器的采收難度,驅動力過大,會損傷白蘆筍,增加了損傷率;驅動力過小,就會存在切不斷、提不出等問題,降低了采收率。因此,末端執行器采收過程中驅動力以及高效、低損傷采收的要求成為實現白蘆筍機械化采收的關鍵。
為了解決采收過程中驅動力的問題,實現高效、低損傷采收,本文針對自行設計的采收白蘆筍的末端執行器,分析其與白蘆筍、土壤之間的相互作用過程,推導一種入土驅動力、剪切力和夾持力的計算方法,并通過萬能試驗機和DEM仿真對3個驅動力進行定量描述。首先,通過DEM仿真建立末端執行器-土壤的離散元模型,分析末端執行器入土驅動力;然后,利用萬能試驗機和DEM仿真建立白蘆筍-末端執行器-土壤的互作用模型,分析末端執行器分別與白蘆筍和土壤的作用關系;借助萬能試驗機模擬末端執行器剪切和夾持白蘆筍的過程,從DEM仿真角度分析末端執行器切割和夾持土壤所需的剪切力和夾持力,建立末端執行器剪切力與夾持力的約束條件,確定剪切力與夾持力參數范圍。
1 末端執行器設計與驅動力計算
白蘆筍的采收多為細長的蘆筍刀,成筍后的筍尖長出壟面,通過觀察壟面上的筍尖位置,挖開筍尖旁的土壤,鏟斷白蘆筍根部,抽出白蘆筍后需將土壤回填(圖1),采收步驟比較繁瑣,單根蘆筍采收耗時比較長;現有的一次性白蘆筍收獲機械,雖然采收效率比人工采收高,但是蘆筍的壞損率很高,降低了經濟效益;而自行設計的末端執行器(圖2)仿生人工采收過程,選擇性采收,實現白蘆筍的切根、夾持、拔取,且無需挖土回填,使復雜的作業步驟簡單化,單根蘆筍采收耗時短,不損傷其他蘆筍,保證了經濟效益。

圖1 白蘆筍人工采收過程Fig.1 Artificial harvesting process of white asparagus
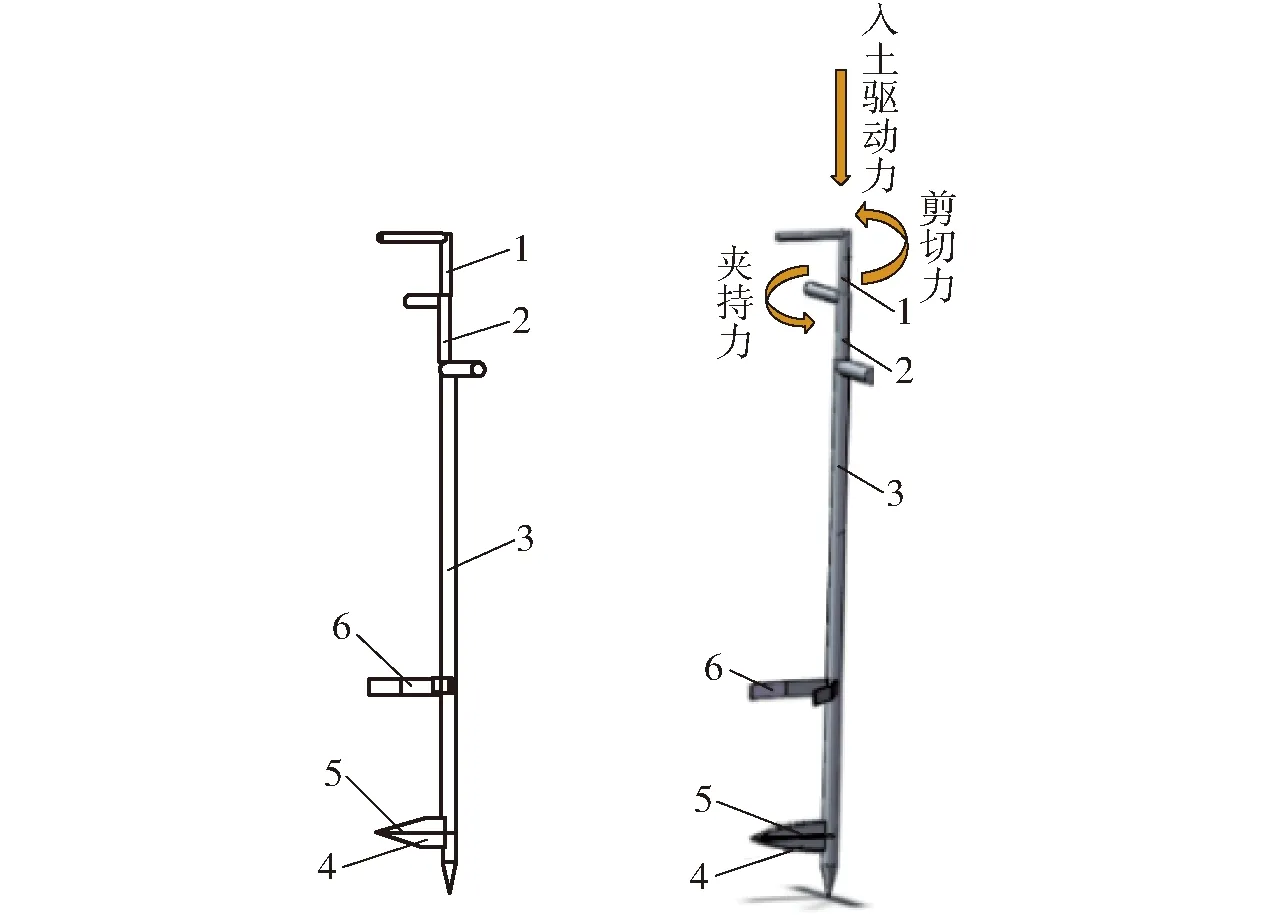
圖2 末端執行器結構示意圖Fig.2 Schematic diagram of end-effector structure1.剪切軸 2.夾持軸 3.外殼體 4.刀片 5.刀片護板 6.夾板
末端執行器工作原理如下:①入土:白蘆筍選擇性收獲機的末端執行器移動到蘆筍頭的側上方,根據當地的采收農藝,驅動末端執行器下插入土壤,到達采收深度。②剪切:剪切電動機驅動剪切軸轉動,從而帶動刀片轉動并切斷白蘆筍。③夾持:夾持電動機帶動夾持軸以及夾板轉動,夾住白蘆筍,然后拔出地面,完成采收工作。
1.1 末端執行器設計
1.1.1整體結構
白蘆筍為培壟種植,壟的尺寸一般為上邊寬700 mm、底邊寬1 300 mm、壟高700 mm的梯形結構,蘆筍一般為第2年開始采收,筍齡一般為10 a。經過在山東省曹縣等地調研發現:1~7 a筍齡的蘆筍生長環境土壤較松軟,蘆筍生長較直;8~10 a筍齡的蘆筍因土壤板結、有土塊等原因會出現彎曲現象。所設計的末端執行器只針對1~7 a筍齡的直蘆筍進行采收。白蘆筍的采收長度一般為地下250~300 mm,所以設計末端執行器的入土深度為250~300 mm。考慮到白蘆筍在地下的生長特性,采用同軸旋轉的結構(圖2),由外殼體、夾持軸、剪切軸、刀片、刀片護板、夾板等組成,其中外殼體、夾持軸、剪切軸、刀片護板、夾板所用材料均為304不銹鋼,為保證較好的剛度,刀片選用高碳鋼材質。
剪切軸下端固定有長度為100 mm的刀片,用于切斷白蘆筍,刀片的轉動角度為90°。夾持軸為直徑10 mm的不銹鋼管,嵌套在剪切軸(8 mm)外面,固定有一片夾板,夾板彎曲一定角度θ,增加夾持白蘆筍時接觸面積。外殼體為直徑12 mm的不銹鋼管,嵌套在夾持軸外面,中部與夾持軸上夾板配合固定另一片夾板,夾板自然狀態下張開60°的夾角。外殼體的下部有保護刀片的刀片護板。其中,為了完成白蘆筍的剪切與夾持,刀片與夾板距離150 mm,既要保證采收長度,還要夾持白蘆筍完成拔取作業。末端執行器固定在白蘆筍選擇性收獲機上作為關鍵作業部件,采收時基于機器視覺的定位方法,通過圖像采集、數字圖像處理的手段,識別出筍尖的位置,進而進行白蘆筍的定位和入土采收。其中外殼體與液壓缸連接,實現末端執行器的入土與拔取;剪切軸由剪切驅動電動機驅動旋轉,實現白蘆筍的剪切;夾持軸由夾持驅動電動機驅動旋轉,實現白蘆筍的夾持。
1.1.2夾板
為了實現夾板夾持白蘆筍,防止打滑,夾板設計如圖2所示,中間有一定彎曲角度θ。夾板夾持白蘆筍的簡化模型如圖3所示。
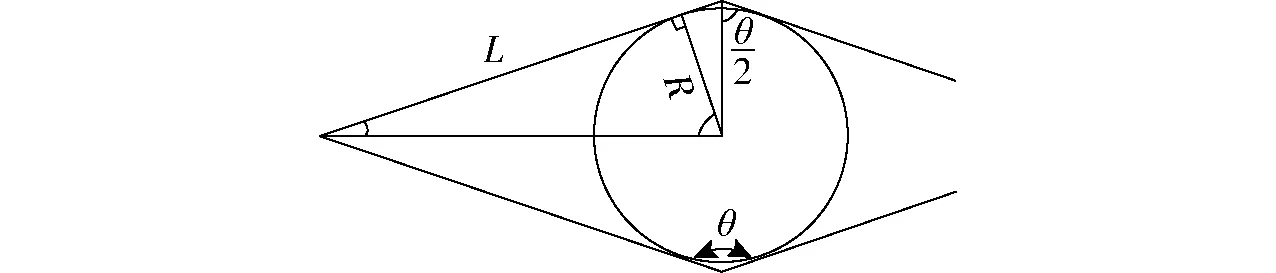
圖3 夾板夾持白蘆筍簡化模型Fig.3 Model of white asparagus with splint
由圖3中夾板夾持白蘆筍的模型簡圖分析可知
(1)
式中R——白蘆筍半徑
L——夾板第1節長度,取50 mm
由式(1)可得
(2)
通過在山東省曹縣等地實地調研,收獲的白蘆筍直徑為10~30 mm,其中80%以上為(20±2) mm。設計夾板彎曲角度時應考慮夾板第1節長度L以及白蘆筍直徑的取值范圍,夾板的彎曲角度θ可由式(2)計算,得出夾板的彎曲角度應在110°~127°,特別針對占比較大的20 mm直徑的蘆筍,最終設計夾板的彎曲角度為120°。
1.1.3刀片護板
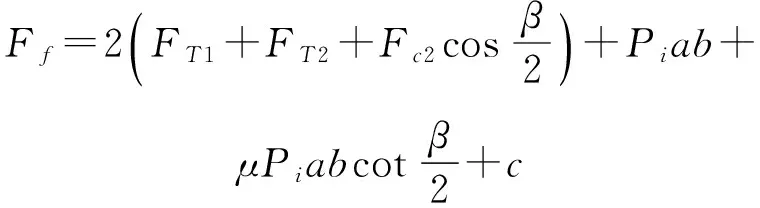
在末端執行器的外部設計了在入土時保護刀片的刀片護板,如圖2所示。刀片護板為中間開槽用于藏刀片的三角結構,為了能完全護住刀片,刀片護板的厚度比刀片寬度大2 mm。刀片護板入土時需要切割土壤,在其入土方向為倒三角結構,如圖4所示。其中由于刀片護板厚度的尺寸固定,入土角成了減少阻力的關鍵,入土角越小,越容易切割土壤;但是入土角減小導致護板與土壤的接觸面積增大,增加了摩擦阻力。

圖4 夾板靜力學模型Fig.4 Splint static model
刀片護板入土阻力
(3)
其中
FT1=μFN1FT2=μFN2FN2=PiA
(4)
對式(4)進行二次求導可得出入土阻力最小時的入土角
(5)
式中β——刀片護板入土角
FN1、FN2——刀片護板法向力
FT1、FT2——刀片護板摩擦力
Fc1、Fc2——刀片護板粘附力
c——土內聚力A——刀片護板側面積
μ——摩擦因數
a——刀片護板厚度
b——刀片護板長度
Pi——單位面積上所受壓強
刀片護板入土角與入土阻力的關系可由式(4)表示,入土角設計由式(5)得到,保證入土阻力最小。
1.2 驅動力計算
1.2.1入土驅動力
在分析末端執行器所需的入土驅動力時,將末端執行器與土壤的接觸模型簡化為圖5,末端執行器扎入土壤一定采收深度時,從深度為H末端執行器與土壤交界處取一末端執行器單元和土單元,對其進行受力分析[6]。
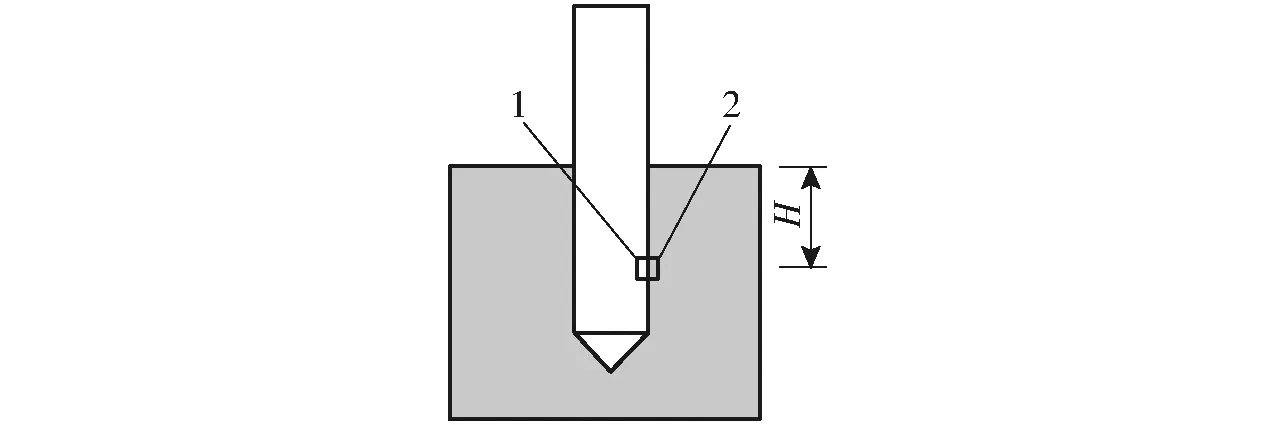
圖5 末端執行器入土驅動力模型Fig.5 Driving force model of end-actuator embedded in soil1.末端執行器單元 2.土單元
末端執行器扎入土壤過程中受到土壤的阻力,即末端執行器的側阻力,入土驅動力需要克服側阻力。由末端執行器入土驅動模型分析可得如下關系:
土的抗剪強度為
τ=c+σtanφ
(6)
其中
σ=K0∑riHi
(7)
式中σ——土的側壓力
K0——土的靜壓力系數
ri——第i層土的重度
Hi——第i層土的厚度
φ——土壤內摩擦角
末端執行器的側阻力為
(8)
式中R1——末端執行器橫截面直徑
dz——入土深度的微分變元
h——末端執行器入土深度
末端執行器入土時側阻力由式(8)表示,入土驅動力應大于入土側阻力f,才能保證完成入土動作。
對3組檢測值的皮爾森相關系數進行分析,觀察兩種快檢方法檢測結果與原吸法檢測結果的相關性水平,并比較兩種方法哪種相關程度更高,結果見表4。
1.2.2剪切力
末端執行器的刀片在完成剪切運動時,首先切割土壤,然后再切割蘆筍。刀片進行剪切運動時的靜力學模型如圖6所示,刀片的剪切力需要克服來自土壤的抵抗機械破壞的粘結力、抗壓力、土壤對刀片的摩擦力和粘附力以及白蘆筍的抗剪強度[7]。
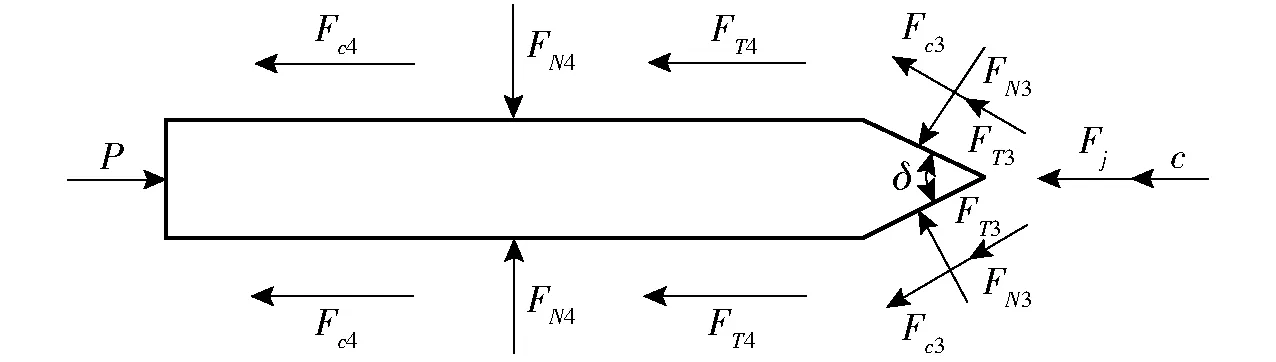
圖6 剪切力靜力學模型Fig.6 Shear stress static model
刀片剪切力為
(9)
其中
FT3=μFN3FT4=μFN4
式中δ——刀片刃角
FN3、FN4——刀刃法向力
FT3、FT4——刃口摩擦力
Fc3、Fc4——刀刃黏聚力
末端執行器剪切白蘆筍時所需剪切力由式(9)表示,刀片需要克服土壤的摩擦力、黏聚力以及白蘆筍的抗剪強度才能完成剪切動作。
1.2.3夾持力
末端執行器夾板夾持白蘆筍靜力學模型如圖7所示,由于夾板在夾持白蘆筍的過程中,夾板先壓縮土壤再夾住白蘆筍,土壤的壓縮運動對白蘆筍產生一個擾動Fd,夾板產生抵抗干擾力的壓力FNx。為了方便計算,假設土壤擾動產生的力作用在白蘆筍的X軸方向[8]。夾板側邊倒角處理,設計成“V”型結構。夾板通過壓實的土壤或其本身夾住白蘆筍,并對白蘆筍莖稈造成一定微量變形。以白蘆筍豎直方向為Z軸,夾板徑向方向為Y軸,夾板軸向為X軸,建立如圖7所示的坐標系。其中,A、B為左右夾板與白蘆筍的接觸點。

圖7 白蘆筍受夾持力時靜力學模型Fig.7 Statics models of white asparagus under clamping force
當夾板夾住白蘆筍處于夾持臨界狀態時,也即末端執行器剛好將白蘆筍夾住并拔取出。根據白蘆筍受力模型圖,分別通過A、B兩點垂直于ZOX面作旋轉軸,并對A、B兩點列力矩方程
(10)
式中D——白蘆筍直徑x1——兩夾持點距離
G——白蘆筍重力
L0——夾板上下接觸點距離
L——擾動點與X軸距離
FAx、FAz——A點在X、Z方向的壓力分量
FBx、FBz——B點在X、Z方向的壓力分量
解得
(11)
(12)
夾板預緊力FA在x方向上的分力
(13)
正壓力FR在x方向上的分力
(14)
末端執行器夾持白蘆筍時,受力較為復雜,當白蘆筍受到土壤的擾動Fd時,夾板的夾持力
F=2(FAx+FRx)
(15)
2 末端執行器驅動力分析
2.1 入土驅動力
現有和土壤相關的研究表明[9-10],末端執行器與土壤相互作用過程中,由于土壤的區域性差異、土壤緊實度等因素的影響,通過傳統的方法研究末端執行器與土壤的作用過程,很難全面深刻地揭示末端執行器與土壤作用的內在機理。因此,近年來與土壤相關的研究[11-12],開始借助離散元法分析土壤顆粒與作業部件的作用機理。本文從DEM仿真角度建立末端執行器-土壤的離散元模型,分析末端執行器與土壤的作用關系,確定末端執行器所需的入土驅動力。
2.1.1離散元模型
土壤粒徑的測定采用篩分法[13-14],土壤篩為8層,由上到下每層的篩孔直徑為3、2、1、0.45、0.3、0.2、0.1、0.05 mm。其中3 mm的土壤篩不作為統計標準。從試驗區采集3份土壤樣本,均為400 g,記為樣品1、樣品2、樣品3。將樣品倒入疊加好的上層土壤篩中,進行篩分。測得土樣中土壤的粒徑分布如表1所示。
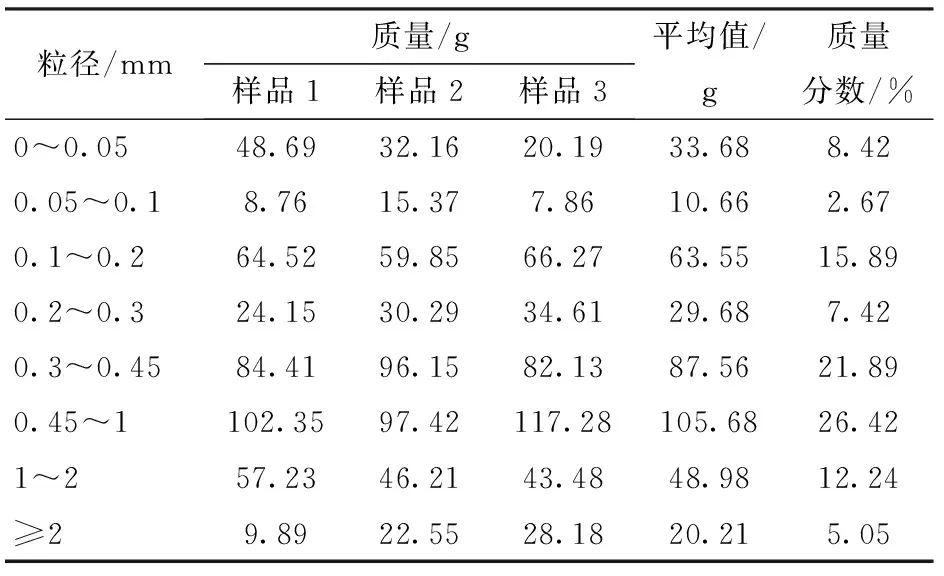
表1 試驗區土壤粒徑分布Tab.1 Distribution of soil particle size in test area
為測定仿真需要的土壤剪切模量,首先借助三軸儀等儀器進行土壤彈性模量的測試。從試驗區采集3份土樣,進行制備土樣、安裝土樣、固結土樣、加壓等操作,隨著不斷地加壓、卸載等操作,載荷與土壤樣本軸向變形形成封閉的滯回圈且面積不斷減小,土壤不斷接近完全彈性應變。土壤彈性模量和土壤剪切模量為
(16)
(17)
式中E——土壤彈性模量
Δσ——軸向載荷
Δh0——土壤彈性變形量
h0——土樣固結后的高度
GT——土壤剪切模量
μt——泊松比
(18)
(19)
式中mi——土壤顆粒i的質量
g——重力加速度
Ii——土壤顆粒i的轉動慣量
ni——與土壤顆粒i接觸的顆粒總數
vi——土壤顆粒i的移動速度
ωi——土壤顆粒i的角速度
t——運動時間
離散元仿真參數設定的具體數值結合方會敏等[11]、丁啟朔等[12]、張銳等[15]設置的參數進行設置,并依據實地測量的土壤粒徑和緊實度對仿真參數進行微調,具體仿真參數設置如表2所示。
仿真中采用150 mm×150 mm×300 mm的土槽,在前處理模塊中依次進行接觸力學模型、仿真參數、土壤顆粒模型、幾何模型和顆粒工廠的設置[17-18]。末端執行器模型導入后,位于土壤模型的上方,結合田間試驗人工手持白蘆筍末端執行器的采收速度為0.1 m/s,采收深度為200~300 mm,設置末端執行器的線性運動速度為0.1 m/s,入土深度為300 mm。結合田間土壤樣本粒徑實測以及仿真設置參數的實際情況,仿真模型中設置粒徑為1 mm,0.2~1.2倍隨機分布,粒子總數為8×105,黏結半徑為1 mm,接觸半徑為2 mm,由于粒子在7 s時落完,開始黏結時間為7.1 s,網格尺寸為2 mm(2倍于粒徑)。在EDEM求解模塊對瑞麗時間步、仿真總時間等進行設置,仿真開始時先生成土壤顆粒,待顆粒生成穩定后末端執行器開始運動,直至仿真結束,在后處理模塊進行仿真分析與數據處理。

表2 離散元仿真參數Tab.2 Discrete element simulation parameters
2.1.2離散元仿真分析
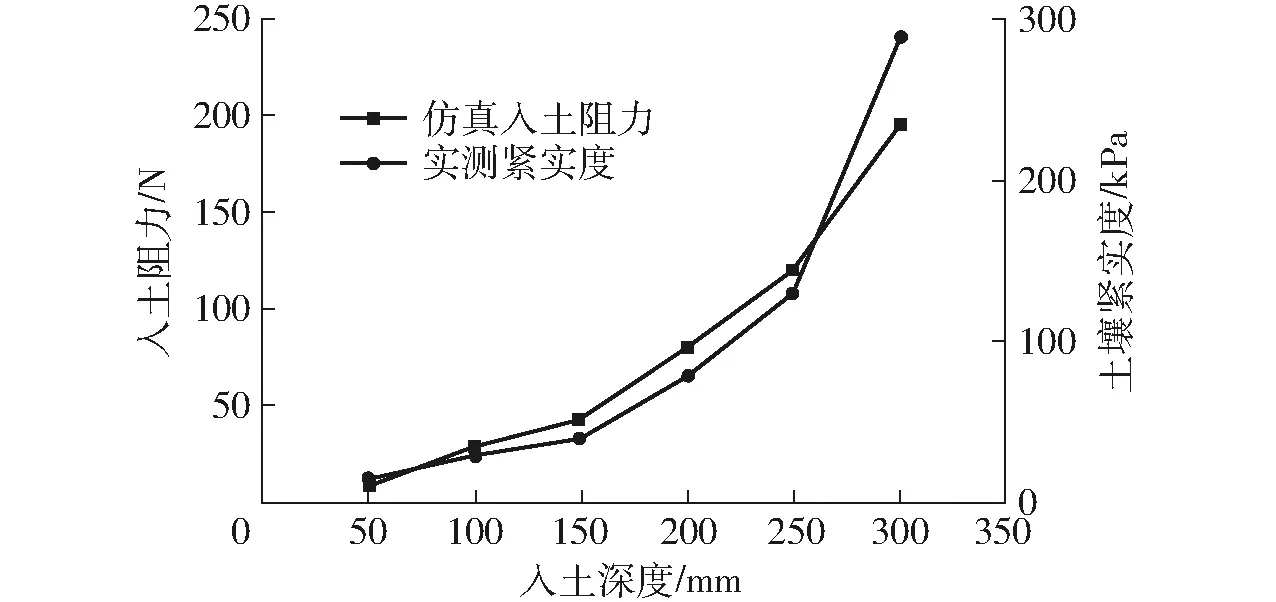
圖8 不同入土深度時的入土阻力對比Fig.8 Comparison chart of resistance of different buried depths to buried soil
圖8反映了末端執行器隨著入土深度的增加,入土阻力逐漸增加的變化趨勢。其中入土深度小于250 mm時,入土阻力隨著入土深度的增加而平緩增加,當入土深度超過250 mm達到300 mm時,末端執行器的入土阻力急劇增加到最大值195 N。而實測土壤的緊實度在不同采收區域實測相同深度土壤的緊實度變化不大,所以默認不同采收區域的緊實度變化趨勢一致,其變化趨勢也是隨著入土深度的增加而逐漸增加。仿真的入土阻力和實測的土壤緊實度變化趨勢一致。由末端執行器入土阻力分析其扎入土壤所需的驅動力應該大于在仿真中末端執行器入土深度300 mm時所需的驅動力195 N。
為分析末端執行器入土驅動力的微觀作用機理,沿垂直于末端執行器運動方向,對仿真區域中的土槽進行切片處理,并用不同顏色對受擠壓力不同的粒子進行標色處理,如圖9所示。
當入土速度為0.1 m/s時,基于DEM仿真分析得到不同入土深度時土壤粒子受到擠壓力的仿真圖。如圖9所示,隨著末端執行器入土深度的增加,末端執行器前端的粒子由于受到擠壓顏色越來越深,并且粒子數目越來越多,此時末端執行器的入土阻力越來越大。在末端執行器入土深度50 mm時,只有末端執行器頭部進入土壤,受擠壓的粒子集中在末端執行器頭部位置。當末端執行器進入土壤100 mm時,此時刀片護板也開始進入土壤,由于在刀片護板的擠壓力下,末端執行器刀片護板側受到擠壓的土壤粒子數增多,如圖9b所示。當末端執行器的夾板和刀片護板完全進入土壤之后,如圖9c和圖9d所示,末端執行器尖部和刀片護板的位置顏色加深粒子數較多。當采收深度到達300 mm時,受到擠壓的粒子數達到最大值,此時對應的末端執行器入土阻力也達到最大。末端執行器的微觀驅動力變化總體與圖8所示的變化一致,根據DEM后處理模塊得出末端執行器所受法向擠壓力、末端執行器的入土阻力為
Fz=μzFτ
(20)
式中Fz——末端執行器入土阻力
μz——動摩擦因數
Fτ——末端執行器法向擠壓力
由上述分析得出末端執行器入土阻力為195 N,即末端執行器所需的入土驅動力FRT>195 N,才能保證末端執行器完成入土動作。
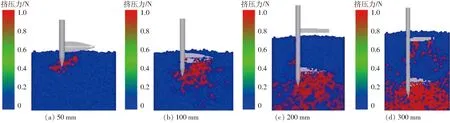
圖9 不同入土深度粒子受力分析Fig.9 Force analysis of particles in different buried depths
2.2 剪切力
由于僅從DEM仿真角度無法獨立分析末端執行器、白蘆筍、土壤三者之間的作用關系,借助萬能試驗機與DEM仿真聯合建立白蘆筍-末端執行器-土壤的作用模型,并從末端執行器切割白蘆筍和土壤兩個方面分析末端執行器的剪切力。利用萬能試驗機模擬末端執行器剪切白蘆筍過程,確定白蘆筍剪切強度,從DEM角度分析末端執行器切割土壤所需的剪切力。通過這兩者建立末端執行器剪切力的約束條件,確定剪切力的參數范圍。
2.2.1白蘆筍剪切性能試驗材料與方法
采樣地點為山東省曹縣白蘆筍種植基地,采樣時間為2017年6月上旬,取樣方法為隨機取樣,剔除損傷開裂、受蟲害等現象的白蘆筍,所采白蘆筍盡可能通直,粗細差距較明顯,采完樣后將白蘆筍編號,裝入密封袋密封保存。
試驗所用的設備為微機控制電子式萬能試驗機(WDW-5E型,濟南試金集團有限公司)、游標卡尺等,利用萬能試驗機模擬末端執行器切斷白蘆筍的過程[19-22]。白蘆筍分段試驗,從白蘆筍頭部向下150 mm處向下取50 mm為試樣4(上部試樣);沿試樣4取樣位置再向下取50 mm為試樣5(中部試樣);沿試樣5取樣位置再向下取50 mm為試樣6(下部試樣);白蘆筍的剪切取樣示意圖如圖10所示。

圖10 剪切取樣示意圖Fig.10 Shear-sampling schematic
剪切試驗按照GB/T 1939—2009和GB 1937—1991規定進行,試驗加載速率為2 mm/min,數據采樣速度2個/s。根據試驗機記錄的力值-變形量數據,算出剪切功。
2.2.2末端執行器剪切力離散元仿真
DEM仿真參數設置同2.1.1節,在上述仿真基礎上,仿真末端執行器在200、250、300 mm 3種不同入土深度時,完成剪切動作,末端執行器所需的剪切力。
2.2.3剪切性能試驗與仿真結果分析
圖11是剪切試樣的剪切力-應變曲線。由圖11可以看出,在剪切載荷的作用下,隨著剪切力的增大而逐漸達到白蘆筍的剪切強度極限。當剪切力達到最大值之后,白蘆筍的剪切強度降低,隨后上升一段,直至被剪斷。

圖11 剪切力-應變曲線Fig.11 Shear stress-strain curve
剪切試樣上、中、下3部分各10個,試驗結果如圖12所示。由圖12可知,白蘆筍的剪切力最大值為1.3 N,最小值為0.5 N,平均值為0.8 N,標準差為0.19 N,變異系數為24.3%。

圖12 剪切試驗結果Fig.12 Shearing test results
根據試驗機記錄的力值-變形量數據,計算白蘆筍的剪切功。如圖13所示,切斷白蘆筍不同部位的剪切功有所不同,白蘆筍下部的剪切功大于中部和上部的剪切功,這與圖12剪切試驗結果中所示的峰值剪切力相吻合。白蘆筍剪切功的最大值為0.03 N·m,最小值為0.017 N·m,平均值為0.024 N·m,標準差為0.005 N·m,變異系數為19.8%。
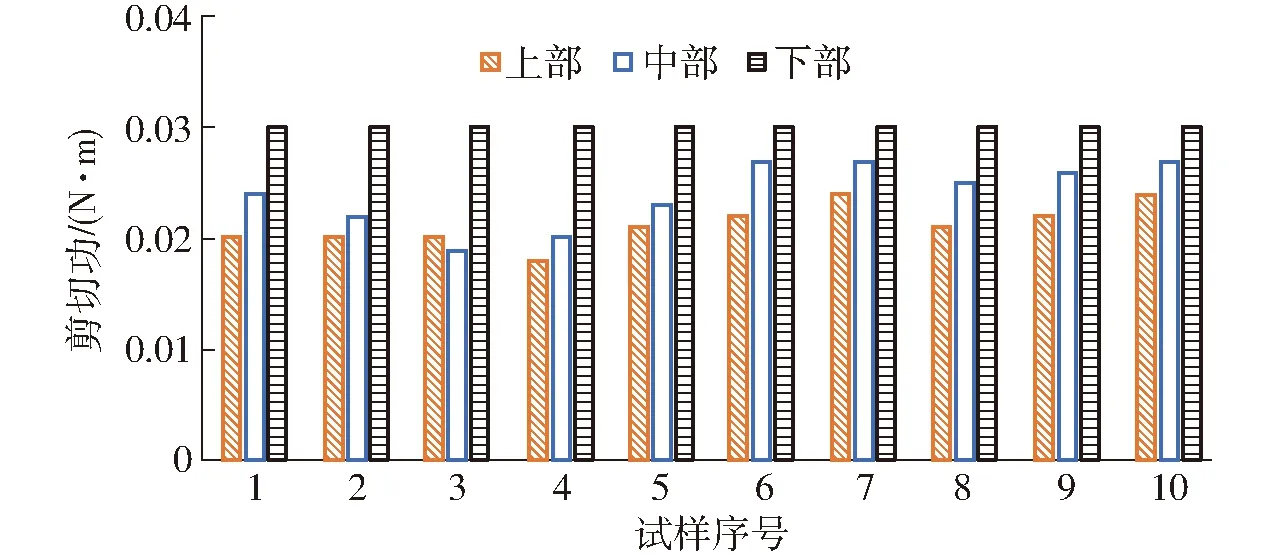
圖13 不同部位剪切功對比Fig.13 Comparison of shear work in different parts
由剪切試驗的結果分析可知,末端執行器剪切白蘆筍時的剪切力應大于白蘆筍的峰值剪切力,才能保證將白蘆筍切斷。下面將從離散元仿真角度分析末端執行器與土壤的作用過程。
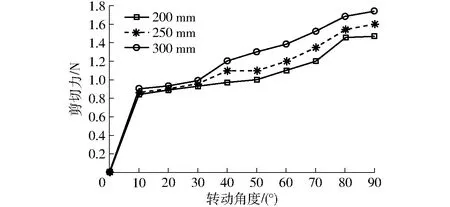
圖14 不同入土深度剪切力對比Fig.14 Shearing force comparison of different buried depths
圖14反映了在200、250、300 mm 3種不同采收深度下,末端執行器剪切力的變化趨勢。如圖14所示,總體來看末端執行器的剪切力隨著采收深度的增加而逐漸增加,同時,隨著刀片轉動角度的增加,剪切力也有一定幅度增加。但轉動角度對剪切力的影響比采收深度對剪切力的影響小。末端執行器在剪切白蘆筍時,剪切力應該大于1.8 N。
依據末端執行器與白蘆筍的剪切試驗結果分析,剪切力應大于剪切白蘆筍的峰值剪切力1.3 N;末端執行器與土壤的離散元仿真分析,剪切力應大于最大值1.8 N,實際作業過程中,剪切力取最大值,所以末端執行器的剪切力FJQ>1.8 N,才能保證完成剪切動作。
2.3 夾持力
2.3.1白蘆筍夾持性能試驗材料與方法
夾持力試驗的材料采集與試驗儀器設備同2.2.1節,夾持力試驗在上文所述的基礎上進行。
利用萬能試驗機模擬末端執行器夾持白蘆筍的過程。由于夾持白蘆筍為橫紋方向夾持,故只需進行白蘆筍橫紋夾持試驗。白蘆筍分段試驗,從白蘆筍頭部向下60 mm處向下取50 mm為試樣1(上部試樣);沿試樣1取樣位置再向下取50 mm為試樣2(中部試樣);沿試樣2取樣位置再向下取50 mm為試樣3(下部試樣);白蘆筍夾持取樣示意圖如圖15所示。

圖15 夾持取樣示意圖Fig.15 Sampling schematic diagram of clamping
夾持試驗按照GB/T 1939—2009和GB 1937—1991規定進行,試驗加載速率為2 mm/min,數據采樣速度2個/s。根據試驗機記錄的力值-變形量數據,算出夾持功。
2.3.2末端執行器夾持力離散元仿真
DEM仿真參數的設置同2.1.1節,在上述仿真基礎上,仿真末端執行器在200、250、300 mm 3種不同入土深度下,完成夾持動作時末端執行器所需的夾持力。考慮到夾板與粒子的作用力是相互的,在夾持的仿真過程中,將與夾板接觸的粒子用原點標記,單個粒子受力如圖16所示。由粒子受力云圖可知,與夾板遠端(遠離執行器端)相接觸的粒子應力較大,對應夾板應力也較大;相反,另一端夾板的應力較小。這與夾板轉動過程中,遠端轉動幅度較大,壓縮土壤粒子較多有關。因此,在夾板轉動過程中與夾板直接接觸的土壤粒子的總應力較小,因而對應的夾板應力也較小,夾板選用的304不銹鋼材料可以滿足強度和剛度的需求。

圖16 與夾板接觸的粒子受力分析Fig.16 Force analysis of particle in contact with splint
2.3.3夾持性能試驗與仿真結果分析
由圖17可以看出,試樣在夾持載荷的作用下,隨著壓應力的增大逐步達到抗壓比例極限,在這個過程中出現線性段,壓應力達到抗壓比例極限后試樣微觀組織開始破壞,壓應力先緩慢上升,接著小幅度下降,最后試樣被壓實,壓應力又迅速上升。由圖17可以看出,在應變達到2.4 mm,壓應力達到0.12 MPa時,白蘆筍的微觀組織開始遭到破壞,由于本試驗目的為測得白蘆筍損傷的最大應力,故只研究白蘆筍達到屈服強度之前的部分。
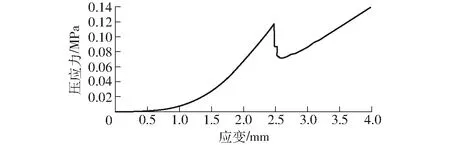
圖17 壓應力-應變曲線Fig.17 Clamping stress-strain curve
夾持試樣取上、中、下3部分各10個,試驗統計的白蘆筍抗壓強度結果如圖18所示。由圖18可以看出,在上、中、下3部分試樣的結果中,上部的受損應力明顯小于下部。試樣抗壓強度最大值為0.12 MPa,最小值為0.06 MPa,平均值為0.08 MPa,標準差為0.02 MPa,抗壓強度最小值乘以試驗蘆筍的截面積,得到試樣所承受的最大破壞載荷為13 N,變異系數為25%。
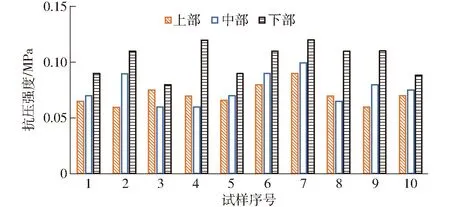
圖18 夾持試驗結果Fig.18 Clamping test result
根據試驗機記錄的力值-變形量數據,計算白蘆筍的夾持能。如圖19所示,不同部位的夾持能有所不同,白蘆筍下部的夾持能明顯大于中部和上部的夾持能,這與圖18夾持試驗結果中所示的抗壓強度相吻合。計算夾持能最大值為0.071 N·m,最小值為0.04 N·m,平均值為0.54 N·m,標準差為0.12 N·m,變異系數為22.3%。

圖19 不同部位夾持能對比Fig.19 Comparison of clamping energy in different positions
末端執行器在夾持白蘆筍時,夾持力應小于破壞載荷的最小值,才不會損傷白蘆筍,實現低損傷采收。
圖20反映了在200、250、300 mm 3種不同采收深度下仿真末端執行器夾板所需的夾持力對比。由圖20所示,總體來看末端執行器的夾持力隨著采收深度的增加而逐漸增加。同一轉動角度下,不同采收深度的夾持力有所不同,采收深度越深,夾持力越大,這與圖9中測得土壤緊實度隨深度增加而增加的情況相吻合。隨著末端執行器夾板的轉動,所需的夾持力逐漸增加,在轉動角度超過40°時,仿真中末端執行器夾板的夾持力迅速增加。而由萬能試驗機測得白蘆筍的受損的夾持力為13 N,因此末端執行器的夾持力FJC<13 N,即夾板的轉動角度在40°左右時,才能保證不損傷蘆筍,實現低損傷采收。
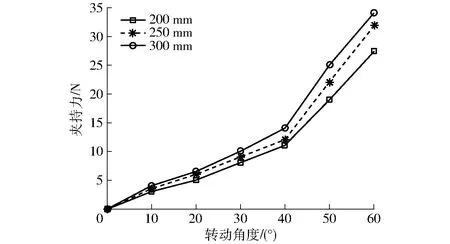
圖20 不同入土深度夾持力對比Fig.20 Clamping force comparison of different buried depths
3 采收試驗
為驗證白蘆筍末端執行器按照本文中提供的驅動力進行采收作業,能否實現低損傷采收,按照本文分析的末端執行器的參數范圍,依據實際情況選取4組參數組合進行田間試驗(圖21),以白蘆筍采收率和損傷率來標定參數組合的合理性與準確性。

圖21 田間試驗情況Fig.21 Field trials
試驗地點選擇山東省曹縣,試驗區的土壤為弱堿性輕質壤土。選取不同地塊的田壟進行試驗,利用高精度拉力計提供給末端執行器入土驅動力;利用高精度拉力計給末端執行器在采收深度為200、250、300 mm時分別提供剪切力和夾持力;用土壤緊實度儀測量采收區域土壤的緊實度。
按照末端執行器與白蘆筍相互作用的試驗和末端執行器與土壤的相互作用仿真分析所得的末端執行器的參數范圍,選取4組參數組合進行田間采收白蘆筍工作。試驗結果如表3所示,由表3可以看出,在參數范圍內,入土驅動力和剪切力的變化對采收率和損傷率影響不大,只是增加了機器的功耗,入土驅動力和剪切力可以根據實際功耗選擇。而夾持力對采收率影響較大,隨著夾持力變小,末端執行器的采收率顯著降低。這是因為夾持力降低,末端執行器的夾板不能完全夾住白蘆筍,會產生打滑現象,降低了采收率。經過分析可以看出,在入土驅動力200 N、剪切力2 N、夾持力11 N時,白蘆筍的采收率大于99%,損傷率小于3%,符合低損傷的采收要求,損傷率在可接受范圍內,且機器的功耗較低。
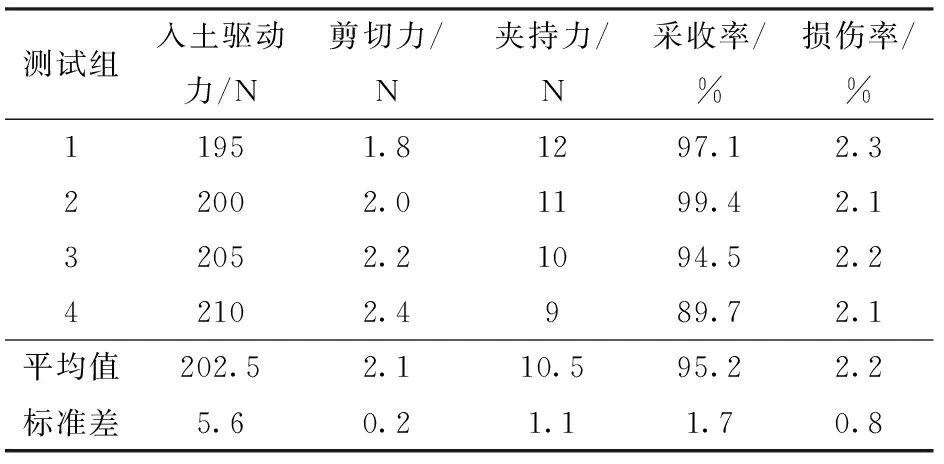
表3 田間試驗測定結果Tab.3 Field test results
4 結論
(1)通過簡化模型分析推導出了一種入土驅動力、剪切力和夾持力的計算方法,為白蘆筍選擇性收獲機控制系統設計提供了理論依據。
(2)從DEM仿真角度建立末端執行器-土壤離散元模型,分析末端執行器與土壤作用過程,確定末端執行器入土驅動力FRT>195 N的參數范圍。
(3)利用萬能試驗機和DEM仿真建立白蘆筍-末端執行器-土壤作用模型,分析末端執行器分別與白蘆筍、土壤的作用關系,建立剪切力和夾持力約束條件,確定末端執行器剪切力FJQ>1.8 N、夾持力FJC<13 N的參數范圍。
(4)選取4組參數組合進行田間采收試驗,結果表明:在入土驅動力200 N、剪切力2 N、夾持力11 N的參數組合下,白蘆筍采收率大于99%,損傷率小于3%,試驗結果符合低損傷采收的要求。
1沈云亭. 蘆筍采收技術要點[J]. 河南農業,2008(5):38.
2陳度,ZHANG Qin,王書茂,等. 蘆筍機械化收獲技術現狀與發展分析[J]. 中國農業大學學報,2016,21(4):113-120.
CHEN Du, ZHANG Qin, WANG Shumao, et al. Current status and future solutions for asparagus mechanical harvesting[J]. Journal of China Agricultural University, 2016,21(4):113-120.(in Chinese)
3薛忠,宋德慶,劉恩平,等. 國內外蘆筍種植收獲機械化研究進展[J]. 中國農業科技導報,2014,16(2):79-84.
XUE Zhong,SONG Deqing,LIU Enping, et al. Frontier of asparagus planting and harvesting mechanization in the world[J]. Journal of Agricultural Science and Technology,2014,16(2):79-84. (in Chinese)
4DONG F, HEINEMANN W, KASPER R. Development of a row guidance system for an autonomous robot for white asparagus harvesting[J]. Computers & Electronics in Agriculture, 2011, 79(2):216-225.
5CHATZIMICHALI A P, GEORGILAS I P, TOURASSIS V D. Design of an advanced prototype robot for white asparagus harvesting[C]∥IEEE/ASME International Conference on Advanced Intelligent Mechatronics, 2009:887-892.
6閆明,郭志勇. 泊松效應對打樁樁側阻力的影響[J]. 山西建筑,2005(7):47-48.
YAN Ming, GUO Zhiyong. Influence of poisson effect to skin resistance for pile driving[J].Shanxi Architecture, 2005(7):47-48. (in Chinese)
7尤泳,賀長彬,王德成,等. 土壤耕作部件極窄刀齒與土壤作用關系研究[J/OL]. 農業機械學報,2017,48(6):50-58.http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?flag=1&file_no=20170606&journal_id=jcsam.DOI:10.6041/j.issn.1000-1298.2017.06.006.
YOU Yong, HE Changbin, WANG Decheng, et al. Investigating the soil tillage very narrow tine-soilinteraction during the penetration process[J/OL].Transactions of the Chinese Society for Agricultural Machinery, 2017,48(6):50-58. (in Chinese)
8葉敏,鄒湘軍,楊洲,等. 荔枝采摘機器人擬人指受力分析與夾持試驗[J/OL]. 農業機械學報,2015,46(9):1-8.http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?flag=1&file_no=20150901&journal_id=jcsam.DOI: 10.6041 /j.issn.1000-1298.2015.09.001.
YE Min,ZOU Xiangjun,YANG Zhou,et al. Clamping experiment on humanoid fingers of litchi harvesting robot[J/OL]. Transactions of the Chinese Society for Agricultural Machinery, 2015,46(9):1-8.(in Chinese)
9ZHANG Rui, LI Jianqiao.Simulation on mechanical behavior of cohesive soil by distinct element method[J]. Journal of Terramechanics,2006,43(3):303-316.
10方會敏,姬長英,FARMAN Ali Chandio,等. 基于離散元法的旋耕過程土壤運動行為分析[J/OL]. 農業機械學報,2016,47(3):22-28.http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?flag=1&file_no=20160304&journal_id=jcsam.DOI: 10.6041 /j.issn.1000-1298.2016.03.004.
FANG Huimin,JI Changying, FARMAN Ali Chandio, et al.Analysis of soil dynamic behavior during rotary tillage based on distinct element method[J/OL].Transactions of the Chinese Society for Agricultural Machinery,2016,47(3):22-28. (in Chinese)
11方會敏,姬長英,AHMED Ali Tagar,等. 秸稈-土壤-旋耕刀系統中秸稈位移仿真分析[J/OL]. 農業機械學報,2016,47(1):60-67.http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?flag=1&file_no=20160109&journal_id=jcsam.DOI: 10.6041/j.issn.1000-1298.2016.01.009.
FANG Huimin, JI Changying, AHMED Ali Tagar, et al. Simulation analysis of straw movement in straw-soil-rotary blade system[J/OL].Transactions of the Chinese Society for Agricultural Machinery,2016,47(1):60-67. (in Chinese)
12丁啟朔,任駿,BELAL Eisa Adam,等. 濕粘水稻土深松過程離散元分析[J/OL]. 農業機械學報,2017,48(3):38-48.http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?flag=1&file_no=20170305&journal_id=jcsam.DOI:10.6041/j.issn.1000-1298.2017.03.005.
DING Qishuo, REN Jun, BELAL Eisa Adam, et al. DEM analysis of subsoiling process in wet clayey paddy soil[J/OL].Transactions of the Chinese Society for Agricultural Machinery,2017,48(3):38-48. (in Chinese)
13李曉鵬,劉建立,張佳寶,等. 華北沖積平原壤質潮土的土壤粒徑分形空間尺度分析[J]. 農業工程學報,2014,30(4):118-124.
LI Xiaopeng, LIU Jianli, ZHANG Jiabao, et al. Analysis of fractal magnitude of soil particals in loamy Chao soils in North China plain[J]. Transactions of the CSAE,2014,30(4):118-124. (in Chinese)
14趙清賀,盧訓令,湯茜,等. 黃河中下游河岸緩沖帶土壤粒徑分形特征[J]. 中國水土保持科學,2016,14(5):37-46.
ZHAO Qinghe, LU Xunling, TANG Qian,et al.Fractal dimension charactiersic of soil partical size in the riparian buffer zone of the middle and lower reaches of the Yellow River[J].Science of Soil and Water Conservation,2016,14(5):37-46. (in Chinese)
15張銳,韓佃雷,吉巧麗,等. 離散元模擬中沙土參數標定方法研究[J/OL]. 農業機械學報,2017,48(3):49-56.http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?flag=1&file_no=20170306&journal_id=jcsam.DOI:10.6041/j.issn.1000-1298.2017.03.006.
ZHANG Rui, HAN Dianlei, JI Qiaoli, et al.Calibration methods of sandy soil parameters in simulation of discrete element method[J/OL].Transactions of the Chinese Society for Agricultural Machinery,2017,48(3):49-56.(in Chinese)
16韓燕龍,賈富國,唐玉榮,等. 顆粒滾動摩擦系數對堆積特性的影響[J]. 物理學報,2014,63(17):173-179.
HAN Yanlong, JIA Fuguo, TANG Yurong, et al.Influence of granular coefficient of rolling friction on accumulation characteristics[J].Acta Physica Sinica,2014,63(17):173-179. (in Chinese)
17POTYONDY D O, CUNDALL P A. A bonded-particle model for rock[J]. International Journal of Rock Mechanics and Mining Sciences,2004,41(8):1329-1364.
18COETZEE C J, ELS D N J. The numerical modelling of excavator bucket filling using DEM[J]. Journal of Terramechanics,2009,46(5):217-227.
19吳良軍,楊洲,洪添勝,等. 荔枝樹枝力學特性的試驗研究[J]. 農業工程學報,2012,28(16):68-73.
WU Liangjun, YANG Zhou, HONG Tiansheng, et al. Experimental study on mechanical properties of litchi branches[J]. Transactions of the CSAE, 2012, 28(16): 68-73.(in Chinese)
20李玉道,杜現軍,宋占華,等.棉花秸稈剪切力學性能試驗[J]. 農業工程學報,2011,27(2):124-128.
LI Yudao, DU Xianjun, SONG Zhanhua, et al. Test of shear mechanical properties of cotton stalks[J]. Transactions of the CSAE,2011, 27(2): 124-128.(in Chinese)
21楊望,楊堅,鄭曉婷,等.木薯力學特性測試[J]. 農業工程學報,2011,27(增刊2):50-54.
YANG Wang, YANG Jian, ZHENG Xiaoting, et al. Experiment on mechanical properties of cassava[J]. Transactions of the CSAE,2011, 27(Supp.2): 50-54.(in Chinese)
22李智國,劉繼展,李萍萍. 機械采摘中番茄力學特性與機械損傷的關系[J]. 農業工程學報,2010,26(5):112-116.
LI Zhiguo, LIU Jizhan, LI Pingping. Relationship between mechanical property and damage of tomato during robot harvesting[J].Transactions of the CSAE, 2010, 26(5):112-116. (in Chinese)