船舶應用無人機的風險分析和使用建議
2018-04-24 00:55:32陳鋒
江蘇船舶 2018年1期
陳 鋒
(江蘇大津重工有限公司 ,江蘇 鎮江 212221)
0 引言
無人機也叫無人直升機是指可以利用無線電遙控設備及自身的程序控制裝置操縱的無人乘坐飛機,具有自主飛行、垂直起降、自由懸停、多次回收使用,以及按執行任務的不同可攜帶不同的裝備等特點。目前無人機在航拍、測繪、快遞傳輸、抗震救災、野外生存演練、新聞報道、軍事偵察、警用裝備等領域得到應用。
無人直升機按用途可以分為軍用和民用兩種;按外型尺寸可以分為小型、中大型;還可以從技術上來分。本文主要對中大型無人直升機的風險進行分析,并提出預防風險的措施。
1 小型無人機與中大型無人機配置
1.1 小型無人機配置
小型無人機一般采用鋰電池為動力源,充電一次續航力達到20~ 25 min;飛行速度為20 km/h,飛行高度約為120 m;可負重500 g左右;可遙控距離不超過2 km。小型無人機的外形尺寸一般不大于100 cm×100 cm。
小型無人機外型多種多樣,傳統小型無人機外型如圖1所示。
小型無人機的一般配置見表1。
小型無人機構造簡單,價格低廉,操作方便,性價比較高。
小型無人機一般用于室外大型活動場面的拍攝,適用于5級風況以下的作業環境。

圖1 傳統小型無人機外型圖
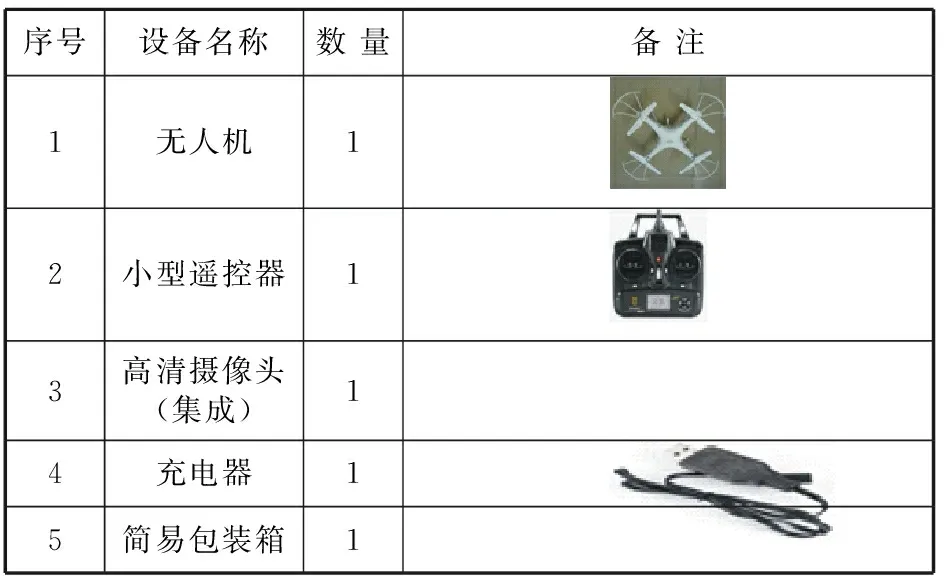
序號設備名稱數量備注1無人機12小型遙控器13高清攝像頭(集成)14充電器15簡易包裝箱1
1.2 中大型無人機配置
中大型無人機一般采用汽油發動機為動力源,配備10 L左右的油箱,飛行續航力約為80 min,巡航速度達到40~60 km/h,最高時速為80 km/h,飛行高度為1 500 m海拔,可負重5 kg有效負荷,可遙控半徑約為10 km。為了更好地保證續航力,可適當犧牲有效負荷的負重,增加油箱容積。中大型無人機外形尺寸一般為1 700 cm×500 cm。
中大型無人機外型多種多樣,傳統中大型無人機外型如圖2所示。
中大型無人機的一般配置見表2。

圖2 傳統中大型無人機外型圖

表2 中大型無人機的一般配置
2 中大型無人機在船舶中的應用
2.1 中大型無人機特點
中大型無人機具有體積小、重量輕、載荷比大、操作靈活、可靠性高、可維護性好等優點,通過無人機自動駕駛儀,可以控制固定翼以及直升機全自主起飛、巡航、懸停、返航、降落。同時可以通過自動駕駛儀控制航拍無人機以及多個任務載荷設備,采用900 MHz的頻率通訊電臺,通訊距離可以達到100 km。即使通訊中斷,也會控制無人機自動返航到預先設置的降落點,大大提高了飛機的安全性。中大型無人直升機因價格不等,配置也不同。正常配置會采用冗余設計,開通差分GPS,精度達到0.5 m,內置兩個CPU工作,檢測到故障時自動切換。出現故障后仍能保持準確的姿態和位置估算,同時地面控制站也會有告警提示。
鑒于以上特點,現在越來越多的公務船舶開始應用中大型無人機,以達到警用反恐、安防監控、應急偵查、抗震救災的目的。
2.2 中大型無人機在船舶應用中的功能
⑴協同地面站一起工作,建立一個第三方助航系統。在船舶航行過程中,對船舶周邊不確定的可疑物進行提前偵察,作為瞭望補充,確保航行時順利通過。
⑵對于船舶營救他人或海上搜救時,可以按傳遞救生物資。船舶航行時,如遇落水人員,船只難以到達時,可以通過中大型無人機進行物資傳送,如救生衣等。
⑶對于執法船舶,可以派遣無人機進行預先偵察,以減少人員傷亡。
3 無人直升機在船舶應用中的風險分析
3.1 防鹽霧處理
無人直升機在船舶應用過程中需注意防鹽霧處理。無人機在海上應用或在船舶上存放,需注意空氣中的鹽霧對無人機外表面的腐蝕。無人機機身一般采用玻璃纖維復合材料或碳纖維復合材料。
3.2 機械故障
無人機對機體可靠性的要求非常高,因而必須重視機械故障。無人機必須和有人機一樣,每次飛行后都要檢測、定期保養。同樣,選擇無人機的生產廠家也必須是經過多次苛刻的測試后才能確定。
3.3 飛機控制器故障
飛行控制器是無人機的核心部件,正常配置會采用冗余設計,出現故障自動切換,并能保持準確的姿態和位置估算。該控制器采用900 MHZ的頻率通訊電臺,通訊距離可以達到100 km。即使通訊中斷,也會控制無人機自動返航到預先設置的降落點,大大提高了飛機的安全性。
3.4 電磁干擾
船舶各種收發天線、磁羅經、電羅經等輔助導航系統,無形就是一個大的磁場,如果受到磁干擾,無人機就會迷路。短時的干擾可以通過慣性導航維持,但慣導的誤差隨時間的累積非常嚴重,維持不了多久也就謬以千里了。為避免磁羅盤被干擾,除了選用性能比較好的硬件外,羅經的模塊一般也會被放置在遠離發動機與電路的位置。另外,無人機在出廠和用戶使用中也要對磁航向進行校正。
3.5 GPS信號的干擾
在無人機起降過程中,船舶鋼質上層建筑對GPS信號的干擾很嚴重,在廣闊的天空影響相對較小。所以,為防止起降故障及多路徑效應帶來的定位誤差,還是建議手動起飛和降落。
3.6 自然環境的影響
一般中大型無人機能抗風6~7級,小量雨水天氣對它的影響也不大。使用無人機前需了解當地及飛行目的地的天氣,需對飛行高度進行控制,并密切關注天氣情況,及時回收,確保無人機的安全。
3.7 人員的操作失誤
中大型無人機的操作與小型無人機的操作不一樣,操作人員需要經過專業的培訓才能上崗,且需兩人以上的同時操作才能完成。培訓時間為1~2月。在操作過程中,要遵守操作規程,不可盲目操作,避免墜機或第三方事故的發生。
3.8 回收風險
一般來說,船舶起降無人機與陸上起降無人機的起降點不一樣,雖然能通過GPS或差分GPS進行回收,但船舶航行中的縱橫傾會給無人機的回收帶來相當的困難。航行船舶上回收無人機也是值得研究的一個新課題。
4 船舶應用無人直升機的操作建議
(1)檢查飛行設備。在多次飛行之后,無人機通常會有一些磨損,要是不注意的話,小問題可能就會引發大問題。所以每次飛行之前,要認真檢查無人機的各處細節,以及遙控器等地面設備。
(2)確保設備油量、電量充足。動力燃油、動力電池是無人機的動力來源,燃油量和電池電量不足,會出現來不及返航的情況。同時也要檢查地面遙控器、手機等設備的電量。 (3)選擇合適的飛行天氣。
選擇適合飛行的天氣條件才能確保飛行安全。
(4)不能超過安全飛行高度。
(5)不能酒后操作飛機。
(6)操作飛行時一定要在視距(無線電和肉眼視距)范圍內飛行。
(7)要時刻保持對飛機的控制。
(8)要在GPS信號良好的情況下飛行。
(9)要遵守政府法律法規。
(10)必須提升飛行技巧,遵守無人機操作流程及規范。
5 結語
隨著科技的不斷發展,地面站的不斷建立,更多的無人機將會應用到船舶。在應用無人機時,要了解無人機的特征和配置情況注意防范風險,遵守無人機操作規程。隨著無人機技術的不斷發展,無人機的構造或使用材料必將更完善、可靠,應用領域也將擴大,應用條件和使用要求也將越來越寬松。
參考文獻:
[1] 王淑芬,吳衛.無人機發展的情報研究[J].飛航導彈,1998(10):32-41,43.
猜你喜歡
艦船科學技術(2022年14期)2022-09-22 03:07:40
中國特種設備安全(2022年6期)2022-09-20 02:52:28
船舶(2021年4期)2021-09-07 17:32:22
小哥白尼(趣味科學)(2019年10期)2020-01-18 09:16:22
汽車維修與保養(2019年7期)2020-01-06 03:30:42
電子制作(2018年11期)2018-08-04 03:26:08
汽車維護與修理(2016年10期)2016-07-10 08:17:41
工業設計(2016年12期)2016-04-16 02:52:00
汽車維修與保養(2015年6期)2015-04-17 03:31:50
汽車維護與修理(2015年2期)2015-02-28 12:15:39