北斗三頻載波相位組合與相對定位研究
2018-04-29 00:44:03丁磊鐘斌禹強華丁然
航空科學技術 2018年1期
丁磊 鐘斌 禹強華 丁然
摘要:通過分析北斗二代一期三頻載波相位觀測量間誤差的相關性,提出基于解算不定方程求解特定波長和電離層延遲下噪聲最優的線性組合系數;分析了不同類型組合觀測量的誤差特性,鑒于由不同原始載波相位觀測量組成的各種線性組合在模糊度解算、電離層延遲修正等方面的優勢,選擇了三組寬巷組合作為中長基線模糊度解算的推薦方案。在此基礎上,利用北斗三頻接收機進行了4次40km范圍內的靜態基線相對定位試驗,分析了北斗三頻組合觀測在中長基線情況下模糊度固定的效率和相對定位的精度。結果表明,推薦的三組寬巷組合方案至多需要5次測量即可準確固定模糊度;在lOkm范圍內采用北斗單頻測量的相對定位精度與采用三頻組合測量的精度相當;超過20km之后采用北斗多頻消電離層組合的相對定位精度明顯高于單頻測量,最多能夠提高71. 4%。
關鍵詞:北斗二代;三頻;組合觀測值;相對定位;整周模糊度
中圖分類號:P228
文獻標識碼:A
DOI:10.19452/j.issn1007-5453.2018.01.012
十多年來,中國一直致力于開發完全自主的衛星導航系統。應用載波相位測量進行相對定位,快速高效地在相應的模糊度域內搜索整周模糊度是模糊度空間搜索的目標。在觀測時間較短或基線較長(大于20km)的情況下,單頻雙差模糊度的搜索往往存在計算時間過長、需要處理很多的極值等問題。而帶來這些問題的重要原因是由于單頻載波的波長較短、載波測量受電離層延遲影響較大等。利用全球衛星導航系統(GNSS)多頻載波相位觀測量間誤差的相關性,構造多頻載波相位觀測量的線性組合,形成具有長波長、弱電離層延遲影響以及小噪聲等優良特性的載波相位組合觀測量,可以提高整周模糊度解算的成功率。
近年來,多頻載波相位組合觀測量尋優方法的研究多是基于GPS系統開展。常青、韓紹偉系統地介紹了GPS雙頻組合觀測量的定義及誤差特性,并利用GPS雙頻相位組合觀測量來提高模糊度函數法的計算效率和可靠性。Cocard系統地介紹了GPS三頻載波相位線性組合系數的尋優方法,推導出線性組合系數集使用條件。Richert提出了基于載波相位組合觀測量的協方差矩陣的三頻GNSS觀測量的誤差特性,給出了組合系數尋優的準則,并利用仿真的GPS三頻數據對不同的線性組合進行了比較。在北斗三頻組合觀測方面,李金龍提出了基于函數極值法求解特定波長和電離層延遲下噪聲最優的北斗三頻載波相位線性組合系數,重點關注三頻組合系數的總和對組合特性的影響,沒有具體分析單一頻率系數的變化對組合特性的影響。
對于北斗系統的定位、導航和授時服務的精度問題也一直是國內外學者密切關注的熱點話題。Shl利用北斗實測數據進行了實時單點定位和相對定位,在436m靜態基線條件下基于載波相位的相對定位精度達到了4cm。2hang仿真分析了未來的北斗全系統的可見性和定位精度因子以及模糊度精度因子。Montenbruck實現了在國外第一次利用北斗進行精密單點定位和相對定位,分析了北斗衛星的軌道精度、時鐘和信號特性,8m靜態基線的相對定位精度達到9mm。
本文首先在建立北斗三頻載波相位的線性組合方程的基礎上,分析北斗三頻線性組合觀測量的誤差特征,提出基于解算不定方程求解特定波長和電離層延遲下的噪聲最優的線性組合系數的方法;通過優化篩選給出三組建議使用的組合系數,并用多組中長基線試驗數據驗證組合的有效性,最后分析各種組合的優劣,討論北斗三頻窄巷消電離層組合進行相對定位的精度問題。
1北斗載波相位組合觀測量
使用北斗載波相位組合觀測技術的優勢主要有兩點:一是組合觀測量能消除或減少某些與原始測量相關的誤差;二是使用組合觀測量能夠減少基于LAMBDA方法求解整周模糊度的計算負擔,提高模糊度固定的效率和可靠性。下面推導組合觀測量對原始測量模型影響。
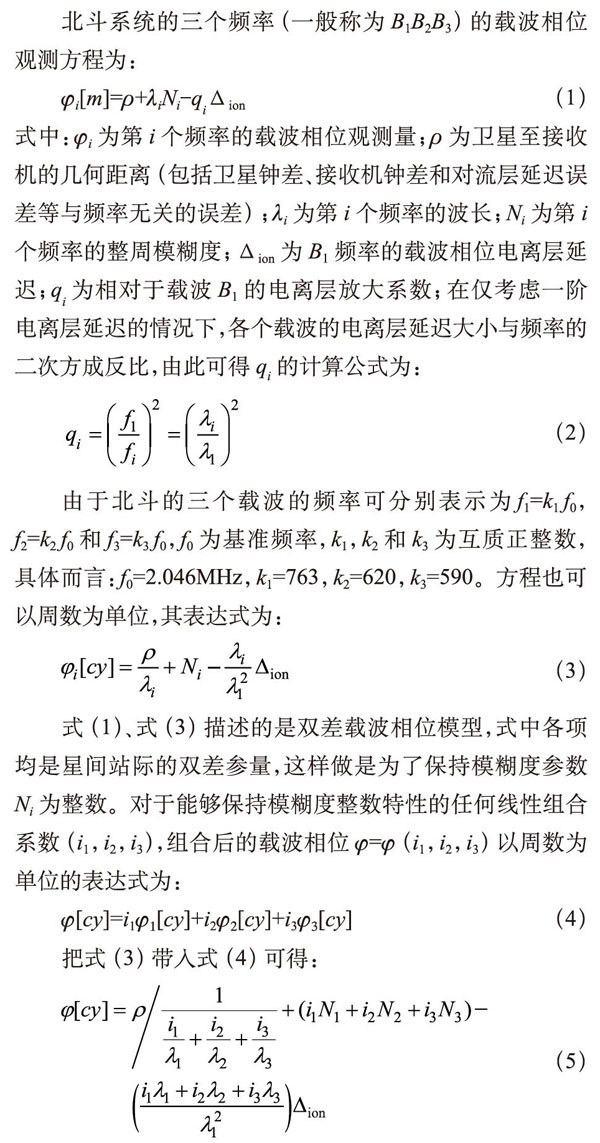
北斗系統的三個頻率(一般稱為BIB283)的載波相位觀測方程為:式中:ψi為第f個頻率的載波相位觀測量;p為衛星至接收機的幾何距離(包括衛星鐘差、接收機鐘差和對流層延遲誤差等與頻率無關的誤差);λi為第i個頻率的波長;Ni為第i個頻率的整周模糊度;△ion為B1頻率的載波相位電離層延遲;qi為相對于載波B1的電離層放大系數;在僅考慮一階電離層延遲的情況下,各個載波的電離層延遲大小與頻率的二次方成反比,由此可得qi的計算公式為:
由于北斗的三個載波的頻率可分別表示為f1=k1f0,f2=k2f0和f3=k3f0,f0為基準頻率,k1,k2和k3為互質正整數,具體而言:f0=2.046MHz,k1=763,k2=620,k3=590。方程也可以周數為單位,其表達式為:
式(1)、式(3)描述的是雙差載波相位模型,式中各項均是星間站際的雙差參量,這樣做是為了保持模糊度參數Ni為整數。對于能夠保持模糊度整數特性的任何線性組合系數(i1,i2,i3),組合后的載波相位ψ=ψ(i1,i2,i3)以周數為單位的表達式為:
把式(3)帶入式(4)可得:
從式(5)可以看出,p和△ion的物理意義沒有變化,組合后的載波ψ的整周模糊度N和波長λ的表達式分別為:
從式(7)可以推導出組合載波的頻率f的表達式為:
因此,組合載波ψ的波長λ可以表示為:λ0/k,其中,λ0≈146.53m為北斗的基準波長。按照參考文獻[4]中的定義,把參數k定義為巷數,巷數k在不受組合載波ψ其他特性參數影響的情況下,能夠完全并且唯一代表組合載波ψ的波長。
假設北斗信號在三個頻率上的載波相位觀測噪聲在以周為單位的基礎上是相同的。由式(4)不難得到組合載波ψ的噪聲標準差以周為單位的大小可以表示為:式中:σ0為北斗單頻載波相位測量包含的以周為單位的觀測噪聲的標準差。因此,組合載波的觀測噪聲標準差放大系數(以周為單位)的表達式為:
由式(5)可得組合載波ψ相對于單頻載波B1的電離層延遲的放大系數q(以周為單位)的表達式為:
綜合以上推導,式(6)、式(8)、式(10)、式(12)能夠表示組合觀測量相對于原始測量在整周模糊度、波長、噪聲、電離層延遲方面的影響,這些影響均能用組合系數(i1,i2,i3)表示。一種簡單的尋優方法就是根據實際需求設定具體閾值,如使i1,i2,i3的取值范圍為(-γ,γ)。在此范圍內進行三維搜索就可得到滿足條件的線性組合系數。參考文獻[2]和參考文獻[3]就是使用這種遍歷尋優方法對雙頻GPS組合觀測量進行尋優的。這種方法雖然簡單可行,但不能揭示組合觀測量誤差特性隨線性系數變化的規律,不利于對線性組合系數進行系統分析。
1.1組合系數尋優
通過求解不定方程推導出具有特定波長(即特定巷數k和電離層延遲放大系數q的組合觀測量在噪聲標準差放大系數,z最小的約束條件下的線性組合系數的方法。
1.1.1巷平面
對于任意一個給定的巷數k,所有符合條件的組合系數i1,i2,i3均滿足如下等式:
763il+620i2+590i3=k
(13)
式(13)在i1-i2-i3空間坐標系表示的是一個平面。由于該方程的解要求是整數,所以其求解過程屬于解算不定方程(又稱線性丟番圖方程),按照晏林介紹的運用矩陣方法求解不定方程,這里直接給出方程的整數通解形式:式中:a和β是任意的整數。
1.1.2電離層延遲放大系數平面
式(12)兩邊同時乘以k1k2,化簡后可得:
36580q=36580i1+45017i2+47306i2
(15)
定義一個新的整數形式的電離層延遲系數q-36580q,那么式(15)可以表示為:
36580i1+45017i2+47306i2=q
(16)
式(16)也屬于不定方程,用求解巷平面的方法求解該方程,其通解表達式為:式中:a和β是任意的整數。
圖1展示了巷數k=0,k=±10000,k=±20000的巷平面和無電離層平面。從圖中可以看出巷數為-k和+k的兩個巷平面關于k=0的巷平面對稱,每個巷平面內組合系數i1,i2,i3如是有規律的空間網格上的整數點。同時可以看出,特定巷數的巷平面與特定電離層延遲系數平面的交集是一條直線。對于特定k和q條件下n最小的最優線性組合一定在這條直線上。
1.2巷平面與電離層平面的交線
把式(17)帶入到式(13)中,化簡可得:
定義p=k-13786q/33,式(18)可以表示為:-5883a+11656β=p。式(18)屬于二元一次不定方程,其求解方法與前兩次的三元一次不定方程的求解類似,這里直接給出方程的通解為:式中:i為任意整數。把a,β的表達式代入到式(17)可得:
i=iO+jδi
(20)式中:δi為方向矢量,io方程的特解,其表達式為:
從空間幾何上來講,δi是巷平面和電離層平面的法矢量(nlane和nion)的叉積,從圖1中也可以看出,所有巷平面或電離層平面都是平行的,那么其法矢量nlane和nion的值是固定的,通過計算可得δi的數值為:
然后,確定j的取值。組合載波觀測量的觀測噪聲標準差最小的點就是這條直線上距離原點最近的點。這樣由空間幾何關系很容易得到一個j的理想值的表達式:式中:jreal有可能不是整數,因此,取距離Jreal最近的整數,即j=round(real)。把此時得到的j帶入到式(20)中就可得到在特定巷數七和電離層延遲系數q條件下組合觀測量噪聲標準差最小的最優線性組合系數。
通過求解不定方程來構建北斗三頻載波相位最優線性組合觀測量的方法,不僅能夠系統全面地分析組合觀測誤差隨線性組合系數的變化規律,而且計算效率比傳統的遍例尋優方法高得多。通常情況下,組合系數尋優方法不需要實時性,且尋優結果的誤差可忽略,研究的重點往往是在探究一種表達方法,用于描述組合觀測系統中系數與誤差特性的內在聯系。參考文獻[6]中所述尋優方法建立在組合觀測誤差特性的幾何狀態空間,把組合系數作為一個系統參數進行求解,不能很好地體現每個系數對組合誤差特性的影響。本文所述的方法直接建立在組合系數i1,i2,i3的幾何狀態空間上,能夠更好地把每個組合系數的變化與誤差特性的關系表現出來,更能直接地表現組合觀測量的誤差特性在i1,i2,i3狀態空間的變化趨勢與特點。
2北斗三頻載波相位組合系統尋優
按照上一節所介紹的方法,本節尋找在特定巷數k和電離層延遲系數q的條件下組合觀測噪聲標準差放大系數n最小的線性組合。限定巷數后的搜索范圍為-200≤k≤1800,電離層延遲系數q限定為-91450≤q≤91450,對應的電離層延遲放大系數q的范圍為-2.5≤q≤2.5。經過尋優計算可得對應與每一組(k,q的最優的線性組合系數及噪聲放大系數n。設定n的取值范圍為n≤1000,尋優結果如圖2所示。
圖2中每一個點(k,q)都代表一個滿足約束條件的最優線性組合方案,用實心圓來表示,實心圓越大,表示該組合觀測量的噪聲越小。
這些組合系數能夠按照i1,i2,i3的和S進行重新分組,如so代表i1,i2,i3=0的組合系數集合。從圖2中可以看出,有4條帶狀區域的組合觀測噪聲明顯比其他區域小得多,這4條帶狀區域分別代表不同S組的低噪聲方差放大系數的(k,q)分布趨勢。為了解算中長基線的整周模糊度,理想情況下尋優的目標是想要找到既有較長波長又對電離層延遲不敏感的組合觀測量。從圖中可明顯看出,矩形區域SO組的組合觀測量就具備上述特性,因此,首先推薦在該區域選擇組合策略。
2.1 SO區域詳細分析
圖3為SO區域的示意圖,圖中把具有相同的i1的組合方案用直線連接起來。從圖3可以看出,相同i1值的組合方案基本呈線性分布。表l列出了圖3中有應用潛力的待選組合方案及其組合特性。
綜合表1中待選方案的組合特性可知,SO區域的組合方案完全符合本文的尋優標準,因此,首先在該區域進行挑選。由于圖3中所有的點均滿足i1,i2,i3=0,這些組合點都是線性相關的。因此,最多只能在其中挑選兩種組合方案,第三種組合方案只能在從Sl組進行挑選。
2.2S1組的詳細分析
從圖2中可以看出,在Sl組中沒有既屬于寬巷又對電離層延遲不敏感的組合方案,因此,只能放寬在Sl組中挑選的限制。其中,Sla區域的組合觀測量具有大波長但對電離層延遲比較敏感,圖4描述了Sla區域的詳細示意圖。
表2列出了圖4中的一些具有潛在應用價值的組合方案及其組合特性。由于該區域組合方案均為寬巷組合,波長大部分處于米級,在各種誤差的綜合作用下大波長有利于模糊度的搜索,因此,推薦第三組組合方案在該區域進行選擇。
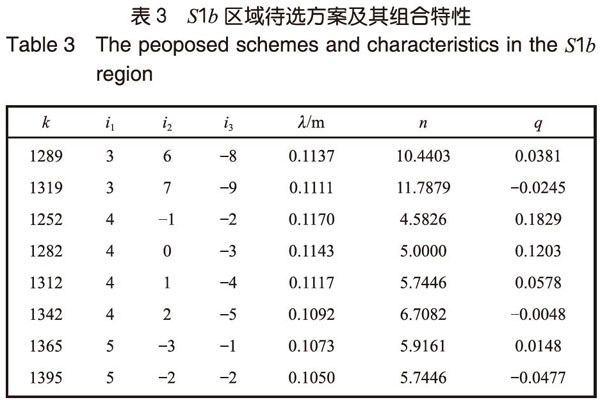
Slb區域的組合觀測量對電離層延遲不敏感但屬于窄巷組合,圖5描述了Slb區域的詳細示意圖。表3列出了圖5中一些具有潛在應用價值的組合方案及其組合特性。由于該區域的組合波長較小,不推薦用于中長基線模糊度的求解,但該區域屬于消電離層組合,在模糊度確定的前提下可作為精確相對定位的組合策略。
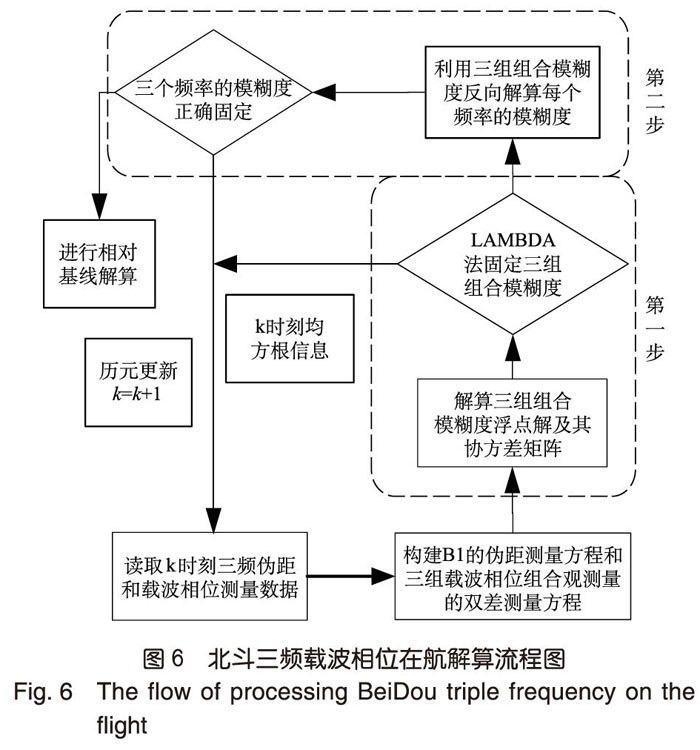
由于本次試驗基線為中長基線,距離分別為4.8km,12.4km,20km和36.8km,在SO組推薦使用(0,1,-1)和(1,-5,4)這兩組寬巷組合系數。在Sla組推薦組合系數為(-5,4,1)的寬巷組合,主要是電離層延遲相對于大波長在中長基線條件下影響較小,而大波長的組合觀測量在用LAMBDA方法解算整周模糊度時更快速,這一點會在本文第三部分進行驗證。模糊度解算算法主要參考文獻[11]~參考文獻[15],具體解算流程詳如圖6所示。
3試驗及結果
為了驗證北斗三頻組合觀測量尋優結果的可用性和北斗二代區域導航系統的相對定位精度,利用北斗三頻接收機進行了中長基線靜態相對定位試驗,試驗采用上海司南衛星導航技術有限公司的M300 GNSS接收機,在北京地區進行了4次40km范圍內的地面靜態試驗,基線長度分別為5km,12.4km,20km和36.8km。接收機采集數據的時間間隔為5s,持續時間均為1420s。衛星數據采集地的具體位置信息可從圖7中看出,圖8展示了試驗中所用的接收機和天線。
3.1組合觀測的優勢
采用第2節推薦的三組寬巷組合系數進行組合觀測的目的是提高模糊度固定的效率。為了驗證三頻組合觀測在這方面的優勢,進行如下測試:在前185次連續測量當中,模糊度估計濾波器在每一個測量歷元均進行重新啟動,分別記錄在每個歷元模糊度重新固定所需的測量歷元個數,最終統計濾波器遍歷啟動情況下固定模糊度所需測量個數。模糊度重新被固定的判定標準為ratio連續超過門限值(設為3)20次。圖9為該測試過程當中5km和20km基線的統計結果。
從圖9可以看出,在Skm基線條件下,90%的三頻組合觀測只需一次測量就可固定模糊度,20km時,這個比例占到85%,所有情況的模糊度固定需要的測量均不超過5次。對于單頻(就北斗Bl頻率而言)觀測量,5km基線條件下,只有30%的情況能夠立刻固定模糊度,50%的情況至少需要10次測量,90%的情況至少需要70次測量;在20km基線條件下,此時單頻觀測量完全不能固定模糊度,這一點從表4中也可看出。表4統計了模糊度解算算法在整個觀測時間內固定模糊度的成功率,成功固定模糊度的標準為ratio>3。從表中可以明顯看出,基線為5km時,單頻與多頻組合觀測對模糊度的固定成功率影響差別不大;而在20km基線條件下,單頻數據完全不能固定模糊度,而三頻組合觀測的模糊度固定與5km基線條件下的成功率相當,均超過98%。以上分析可以得到以下結論:大波長能夠提高LAMBDA方法固定模糊度的效率和成功率;在較長基線條件下,單頻測量不能固定模糊度,必須采用組合觀測。
3.2相對定位誤差
進行北斗系統相對定位誤差分析時,基線的真值由美國噴氣實驗室(JPL)的自動精密定位服務網站提供。由于基線真值具有不確定性偏差,本文重點考慮定位偏差的標準差作為定位精度的評定標準。圖10列出了4種基線情況下采用北斗Bl頻率的測量進行相對定位解算的誤差分布情況,表5列出了圖10中各方向誤差的統計特性。
結合圖10和表5可以看出,北斗Bl頻率的相對定位誤差隨著基線長度的增加而增加。在40km范圍內,東向和北向偏差的標準差受基線長度的影響較小,能夠保持在2cm范圍內;天向偏差的標準差總是大于東向和北向,20km范圍內,天向偏差的標準差能夠保持在2cm范圍內,超過20km后,天向偏差的標準差超過5cm,占總定位誤差的92.1%。這可能是由于現階段北斗MEO衛星部署較少,造成空間觀測幾何當中缺乏足夠多的低高度角的衛星。
以上分析可知單頻北斗數據在36.8km基線的相對定位精度明顯不足,這一點可以從定位偏差的均值看出,尤其是此時天向偏差的均值超過了17cm。為了充分研究北斗三頻測量對相對定位精度的改善,分別運用不同組合觀測量進行相對定位解算。圖11統計了采用組合觀測量進行相對定位與基線真值的偏差,其中矩形高度表示偏差的均值,工字形的大小表示偏差的標準差(即定位誤差)。前三組分別使用北斗Bl,B2,B3三個頻率進行相對定位,4~6組表示分別使用北斗三頻中的任意兩個頻率的載波相位組成非整系數完全消電離層組合進行相對定位;7~11組表示分別用圖5中的一些窄巷整系數消電離層組合進行相對定位。
比較圖11中不同組合系數的定位誤差統計特性可以看出,在20km范圍內,北斗單頻相對定位偏差的標準差在三個頻率上差別在2cm范圍內,在36.8km基線下三個頻率定位偏差的標準差差別明顯,其中,Bl相對定位精度最高,B2次之,B3最差。
Bl,B2和Bl,B3非整系數完全消電離層組合的定位精度與整系數消電離層組合相當;B2,B3非整系數完全消電離層組合的定位偏差的標準差特別大,主要是由于這兩個頻點較為接近,其組合觀測量引入較大的噪聲。因此,不推薦使用這種組合用于高精度相對定位。
在20km基線范圍內,北斗單頻相對定位偏差的標準差與多頻消電離層組合相當;在36.8km基線情況下,消電離層組合相對定位偏差的標準差明顯小于北斗單頻測量,最多能夠提高71.4%。從總體上來說,40km范圍內采用北斗三頻測量能夠使相對定位偏差的標準差在東、北、天三個方向分別控制在lcm,lcm,3cm之內。
4結論
本文通過不定方程分析了北斗多種線性組合的特征,運用試驗手段進行了驗證,取得了如下結論:
(1)對北斗三頻載波相位組合觀測間的誤差特性進行了研究,基于不定方程求解了特定波長和電離層延遲下的噪聲最優的線性組合系數。
(2)在特定波長和電離層延遲范圍內進行了組合方案的尋優計算,通過分析尋優結果中組合觀測量的特性,推薦三組寬巷組合方案(0,1,-1)、(1,-5,4)和(-4,4,1)用于40km范圍內靜態基線的模糊度固定;推薦的三組寬巷組合方案至多需要5次測量即可準確固定模糊度。
北斗系統的地面靜態相對定位偏差在東向和北向基本相當,最大的定位偏差出現在天向方向;在lOkm范圍內單頻觀測量的定位精度與多頻觀測量相當,超過20km之后采用北斗多頻消電離層組合的相對定位精度明顯高于單頻測量。