基于卡爾曼濾波遙測(cè)系統(tǒng)的高仰角跟蹤技術(shù)
2018-05-04 03:35:23周愛(ài)國(guó)
自動(dòng)化與儀表 2018年4期
王 鑫,周愛(ài)國(guó)
(中國(guó)人民解放軍91245部隊(duì),葫蘆島 125000)
遙測(cè)系統(tǒng)在高仰角跟蹤中,很多因素會(huì)影響其跟蹤性能,比較常見(jiàn)的是正割補(bǔ)償環(huán)節(jié)使跟蹤的俯仰角度增大,方位跟蹤的角速度和角加速度也隨之增大,導(dǎo)致跟蹤不到目標(biāo)[1]。在實(shí)踐中發(fā)現(xiàn),高仰角條件下遙測(cè)目標(biāo)相對(duì)天線的角速度還遠(yuǎn)小于系統(tǒng)伺服的最大速度跟蹤指標(biāo)時(shí),就產(chǎn)生了影響跟蹤的較大動(dòng)態(tài)滯后。通過(guò)系統(tǒng)伺服數(shù)據(jù)分析發(fā)現(xiàn),正割補(bǔ)償帶來(lái)的噪聲影響不但會(huì)增大隨機(jī)誤差,還會(huì)加大動(dòng)態(tài)滯后誤差,由此造成跟蹤的瞬時(shí)速度和加速度超出指標(biāo)要求,導(dǎo)致遙測(cè)系統(tǒng)伺服無(wú)法自動(dòng)跟蹤。
文中提出采用卡爾曼濾波實(shí)現(xiàn)單軸跟蹤系統(tǒng)的前饋復(fù)合控制技術(shù),目的是降低信道及接收機(jī)噪聲對(duì)跟蹤環(huán)路的影響,在不影響跟蹤穩(wěn)定性的前提下提高系統(tǒng)的無(wú)差度,減小滯后誤差。在實(shí)踐中發(fā)現(xiàn),利用該技術(shù)還可以濾除高仰角正割補(bǔ)償增大的噪聲影響,降低外界干擾,實(shí)現(xiàn)遙測(cè)目標(biāo)的可靠跟蹤。
1 正割補(bǔ)償原理
在圖1正割補(bǔ)償?shù)膸缀侮P(guān)系中,目標(biāo)在B點(diǎn),俯仰角∠BAE=β,方位角∠EAD=α。當(dāng)目標(biāo)飛行到C點(diǎn)時(shí),假設(shè)此時(shí)飛行距離很短,方位角α的變化也很小。在Δt時(shí)間運(yùn)動(dòng)的角度為Δα,設(shè)

對(duì)距離和時(shí)間取極限

得出

式中:αv為目標(biāo)在斜平面上的角速度。

圖1 正割補(bǔ)償?shù)膸缀侮P(guān)系Fig.1 Geometric relationship of secant compensation
由圖可見(jiàn),只要仰角不為零,實(shí)際天線方位誤差總是大于天饋系統(tǒng)檢測(cè)出的橫向誤差。而且,在天線軸線與目標(biāo)之間橫向誤差不變的情況下,仰角越高,其誤差角越大,當(dāng)仰角趨向90°時(shí),方位誤差角趨于無(wú)窮大。同樣,要使天線軸線的橫向角速度或者角加速度不變,仰角越高,要求方位達(dá)到的角速度或角加速度也越大。即

因此,在實(shí)際自跟蹤系統(tǒng)中,方位支路與俯仰支路相比,多一個(gè)正割補(bǔ)償環(huán)節(jié)。該環(huán)節(jié)將橫向誤差變換成方位誤差,然后送伺服驅(qū)動(dòng)[2],如圖2所示。

圖2 方位支路的正割補(bǔ)償環(huán)節(jié)Fig.2 Secant compensation link of azimuth branch
2 正割補(bǔ)償對(duì)高仰角跟蹤性能影響的分析
由正割補(bǔ)償原理可以看出,高仰角跟蹤時(shí)實(shí)際所需的角速度和角加速度遠(yuǎn)遠(yuǎn)大于實(shí)際檢出的角速度。在實(shí)際跟蹤過(guò)程中,方位角的速度和加速度隨著俯仰角的增加而增加,因而加大動(dòng)態(tài)滯后。補(bǔ)償系數(shù)見(jiàn)表1。
表1 正割函數(shù)Tab.1 Secant function
正割補(bǔ)償?shù)囊胪瑫r(shí)造成干擾和跟蹤的隨機(jī)誤差的線性增大。理想的饋源以及誤差解調(diào)、采集電路解出的誤差電壓和橫向誤差角呈嚴(yán)格的線性關(guān)系,且沒(méi)有噪聲(非熱噪聲)。由于各種干擾和噪聲的存在,實(shí)際的理想線性上還要疊加噪聲信號(hào)。實(shí)際噪聲與原始噪聲的關(guān)系為

可見(jiàn),仰角越高則進(jìn)入方位伺服控制環(huán)路的噪聲越大,即伺服系統(tǒng)對(duì)誤差解調(diào)采集通道的噪聲更加敏感,從而使跟蹤的誤差加大。
在某型高彈道遙測(cè)目標(biāo)跟蹤中[3],天線俯仰角在70°左右時(shí)突然出現(xiàn)強(qiáng)烈抖動(dòng),導(dǎo)致信號(hào)AGC電壓大幅度降低,遙測(cè)接收機(jī)失鎖。俯仰抖動(dòng)情況如圖3所示,AGC電壓曲線如圖4所示。
圖3 俯仰實(shí)時(shí)角曲線Fig.3 Pitch real time angle curve
圖4 遙測(cè)信號(hào)AGC電壓曲線Fig.4 AGC voltage curve of telemetry signal
根據(jù)實(shí)時(shí)伺服曲線圖分析,圖3中俯仰開(kāi)始抖動(dòng)時(shí)刻(1027點(diǎn)),對(duì)應(yīng)圖4中的AGC電壓已經(jīng)衰落(663點(diǎn)),說(shuō)明俯仰的抖動(dòng)原因是遙測(cè)目標(biāo)脫離天線主瓣[4]。檢查方位角度曲線在667點(diǎn)—1001點(diǎn)附近方位出現(xiàn)了90°—89°—90°的跳動(dòng),造成伺服加速度無(wú)法滿足跟蹤要求從而形成動(dòng)態(tài)滯后,方位上首先脫離天線主瓣。造成角度跳動(dòng)的原因,是258點(diǎn)—523點(diǎn)方位角誤差信號(hào)先出現(xiàn)大幅度負(fù)壓,接著出現(xiàn)180點(diǎn)的正壓[5]。由于此階段信號(hào)AGC電壓未出現(xiàn)衰落,說(shuō)明目標(biāo)是在主波束內(nèi),該階段未出現(xiàn)影響跟蹤的動(dòng)態(tài)滯后。時(shí)間為180點(diǎn)的方位角誤差正壓,是導(dǎo)致天線出現(xiàn)回跳的原因[6]。引起方位角誤差正壓的原因,是258點(diǎn)出現(xiàn)的大幅度方位角誤差負(fù)壓,導(dǎo)致天線突然前沖。在AGC電壓值未出現(xiàn)明顯下降,目標(biāo)還在天線主波束范圍內(nèi),且未與天線零點(diǎn)產(chǎn)生較大的偏移情況下,突然出現(xiàn)的角誤差電壓是異常的,外界或內(nèi)部噪聲干擾是引起跟蹤失敗的主要原因[7]。
3 卡爾曼濾波伺服前饋復(fù)合控制原理
對(duì)于目標(biāo)沿觀察站方位或俯仰軸向x的運(yùn)動(dòng)

當(dāng)其加速度采用非零均值時(shí)間相關(guān)模型時(shí),其狀態(tài)方程為


式中:σα為作為機(jī)動(dòng)加速度的“當(dāng)前”概率分布模型——修正瑞利分布的方差。
跟蹤系統(tǒng)中,利用跟蹤接收機(jī)的角誤差信號(hào)Δx和天線基座角度傳感器信號(hào)xA,可以重構(gòu)指令角信號(hào)x。 有

式中:v1主要為接收機(jī)輸出噪聲,也包含角度傳感器測(cè)量誤差、編碼誤差等[8]。另外,與伺服電機(jī)相連的測(cè)速機(jī)輸出y2,可以作為目標(biāo)在該軸向運(yùn)動(dòng)的速度x˙的測(cè)量值,有

式中:v2為速度測(cè)量誤差。 綜合式(10)和式(11),得到量測(cè)方程為

設(shè)r1和r2為零均值白噪聲,有
對(duì)于狀態(tài)方程(8)和量測(cè)方程(12),可以構(gòu)造關(guān)于狀態(tài)向量X的卡爾曼濾波估計(jì)器為
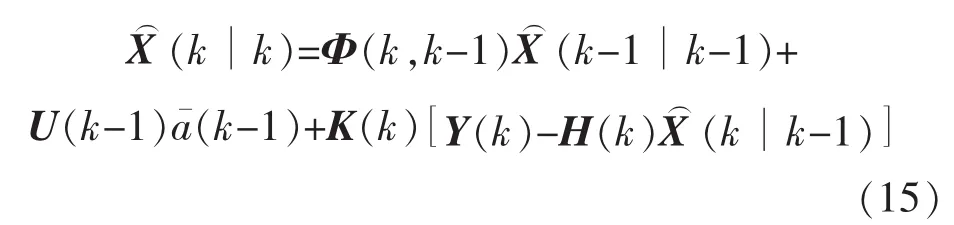
利用上述關(guān)于目標(biāo)位置、速度、加速度的估計(jì),可以完成跟蹤系統(tǒng)的閉環(huán)控制和前饋控制,系統(tǒng)組成如圖5所示。首先,位置估計(jì)((k)與角度傳感器信號(hào)xA之差送伺服系統(tǒng)構(gòu)成跟蹤閉環(huán),其值為

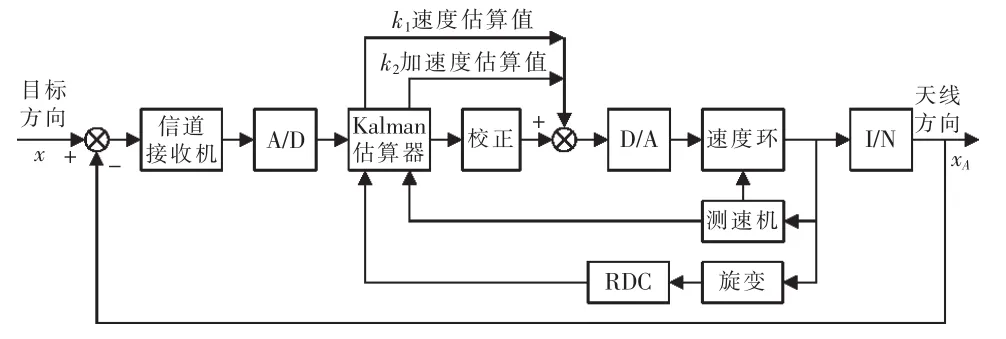
圖5 單軸跟蹤系統(tǒng)前饋復(fù)合控制原理Fig.5 Feedforward control principle of uniaxial tracking system
4 應(yīng)用結(jié)果
在某型遙測(cè)裝備上完成了所設(shè)計(jì)系統(tǒng)的安裝調(diào)試[10]。圖6為引入卡爾曼濾波而實(shí)現(xiàn)伺服前饋復(fù)合控制后,執(zhí)行某項(xiàng)遙測(cè)任務(wù)的一系列伺服數(shù)據(jù)。
由數(shù)據(jù)結(jié)果可以得出,引入用卡爾曼濾波方法實(shí)現(xiàn)的前饋復(fù)合控制,對(duì)于解決高仰角正割補(bǔ)償放大的噪聲對(duì)伺服跟蹤性能的影響的方法,是非常有效的。
5 結(jié)語(yǔ)
在靶場(chǎng)環(huán)境中,日益復(fù)雜的電磁環(huán)境給無(wú)線電跟蹤帶來(lái)的干擾問(wèn)題也越來(lái)越多。正割補(bǔ)償帶來(lái)的噪聲放大效果,是造成裝備高仰角跟蹤不穩(wěn)定問(wèn)題的主要因素。實(shí)踐表明,在遙測(cè)裝備伺服跟蹤系統(tǒng)中,引入卡爾曼濾波方法所實(shí)現(xiàn)的前饋復(fù)合控制,對(duì)于解決上述問(wèn)題具有明顯的效果,能夠保證遙測(cè)裝備天線在高仰角中實(shí)現(xiàn)穩(wěn)定跟蹤。
圖6 伺服數(shù)據(jù)Fig.6 Servo data
參考文獻(xiàn):
[1] 薛敦偉.影響天線高仰角跟蹤性能的因素分析[J].遙控遙測(cè),1998,19(2):34-40.
[2] 韓恩典,李培,蔡睿,等.高仰角弧段雷達(dá)跟蹤不穩(wěn)定因素分析[J].科學(xué)技術(shù)與工程,2011,11(24):5826-5830.
[3] 李邦復(fù).遙測(cè)系統(tǒng)[M].北京:宇航出版社,1992.
[4] 宋洪儒,羅石磊,楊凡.基于PAC的多軸運(yùn)動(dòng)控制系統(tǒng)設(shè)計(jì)[J].重慶理工大學(xué)學(xué)報(bào):自然科學(xué),2017,31(4):115-120.
[5] 楊文光,張遠(yuǎn)高,吳紅霞,等.穩(wěn)定跟蹤伺服控制系統(tǒng)高俯仰角穩(wěn)定問(wèn)題分析[J].火力與指揮控制,2014,39(s1):68-70.
[6] 陳亞軍,儲(chǔ)岳中,張學(xué)鋒.基于遺傳算法的導(dǎo)彈彈射內(nèi)彈道參數(shù)優(yōu)化數(shù)值仿真[J].重慶理工大學(xué)學(xué)報(bào):自然科學(xué),2017,31(4):127-133.
[7] 賈渭娟,何斌,鄭雪娜.軋機(jī)液壓伺服系統(tǒng)滑模變結(jié)構(gòu)控制[J].重慶理工大學(xué)學(xué)報(bào):自然科學(xué),2017,31(4):111-114.
[8] 洪惠宇,陳祝明,高山欽.脈沖多普勒雷達(dá)近程高仰角目標(biāo)的測(cè)量[J].解放軍理工大學(xué)學(xué)報(bào),2015,16(3):209-212.
[9] 司文旭,李山,劉述喜.基于數(shù)字功率計(jì)的變頻器測(cè)試分析[J].重慶理工大學(xué)學(xué)報(bào):自然科學(xué),2017,31(2):125-133.
[10]羅續(xù)成.用Kalman濾波實(shí)現(xiàn)單軸跟蹤系統(tǒng)的前饋復(fù)合控制[C]//2004年第十三屆全國(guó)遙測(cè)遙控技術(shù)年會(huì)論文集.北京:中國(guó)宇航學(xué)會(huì),中國(guó)自動(dòng)化學(xué)會(huì),2004:240-249.
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
中國(guó)洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
測(cè)控技術(shù)(2018年12期)2018-11-25 09:37:34
北京航空航天大學(xué)學(xué)報(bào)(2017年9期)2017-12-18 07:12:25
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
電源技術(shù)(2016年9期)2016-02-27 09:05:39
電源技術(shù)(2015年1期)2015-08-22 11:16:28