自動線機械手位置高速并聯控制技術研究
2018-05-04 08:47:13黃力剛
機械設計與制造工程 2018年4期
黃力剛
(河南工業職業技術學院, 河南 南陽 473000)
隨著人工智能技術和自動化機械作業技術的快速發展,在機械作業裝配等領域,自動線機械手被廣泛應用。自動線機械手能把人從一些重復的簡單勞動中解放出來,并提高自動線作業的性能[1]。在裝配作業中,自動線機械手需要對作業的位置和高度等姿態參量進行自適應調節控制,并通過高速的并聯控制方法進行位姿調節,從而提高機械手作業的精準度和穩定性,因此研究自動線機械手位置高速并聯控制技術對機械手的優化設計具有重要意義,相關的控制算法研究受到人們的極大關注[2-4]。對自動線機械手位置高速并聯控制傳統方法有基于反演積分的機械手姿態校正控制方法、反演積分控制算法、基于激光測距的自動機械手控制方法等,其結合誤差修正技術實現對機械手位置調節和并聯控制,但上述算法存在計算能耗較大和時延長等問題[5]。為此,本文提出一種基于變結構PID模糊控制的自動線機械手位置高速并聯控制算法,通過構建自動線機械手位置高速并聯控制對象模型,進行控制律優化設計,從而提高機械手控制的穩定性,最后通過仿真測試,展示了本文方法在提高控制穩定性方面的優越性。
1 自動線機械手的姿態參量融合及被控對象建模
1.1 機械手位姿姿態定位融合模型設計
為了實現自動線機械手位置高速并聯控制,首先進行機械手的姿態參量信息采集,采用三軸加速度計和三軸磁力計測量自動機械手的位置信息參量[6-9],得到自動線機械手位置參量信息輸出,可表示為:
(1)
式中:qi為參量信息;ci為機械手末端操縱器目標點方向矩陣;αi為機械手末端操縱器目標點的位置向量;si為機械手末端操縱器輸入點的方向矩陣;cαi為權重是αi時,機械手末端操縱器目標點的位置向量;sαi為權重是αi時,機械手末端操縱器輸入點的方向矩陣;di為輸送距離。
自動線機械手在進行位置調節和物體抓取過程中,可用4×4的齊次坐標矩陣表示自動線機械手的位置向量T0(α0,β0,γ0),Ti=T0(θ1,θ2,θ3),i=1,2,3,根據上述自動線機械手位置高速并聯控制對象描述和假設條件,構建自動機械的并聯參數融合模型:
(2)
式中:x(k)∈Rp,表示自動線機械手位置高速并聯控制的力學狀態;u(k)∈Rq,表示傳感器采集的承載力的轉矩分布特征;z(k)∈Rm,表示機械手控制力的輸出;A,B,C為維數矩陣;其中變量p,q,m為正整數,表示自動線機械手位置高速并聯控制的狀態切換分布系數。
1.2 并聯控制模型設計
采用擴展卡爾曼濾波算法進行位置參數調節和融合處理[10],以提高參數的整定性,擴展卡爾曼濾波方程式描述為:
(3)
u(k)=Kx[k-(τsc+τca)]=Kx(k-τk)
(4)
式中:K為外界對機械手形成的阻尼系數;k為機械手減速比;τsc為主動臂對于轉軸的重力矩;τca為從動臂對于轉軸的重力矩;τk為機械手減速比的重力距。
在考慮存在自動線機械手位置分布不均衡條件下,進行時延控制和誤差修正,在不確定時延和小擾動作用下,輸出的自動線機械手位置高速并聯控制模型為:
(5)
式中:D為維數矩陣。
考慮機械手承載力矩的狀態反饋情況,建立控制律u(k)=Kx(k),當機械手控制的時延τk小于1個采樣周期時,進行誤差反饋調節,采用自適應參數補償方法進行控制器的反饋調節[12],實現參量自整定處理,提高系統的穩定性。
2 變結構PID模糊控制算法設計
在構建自動線機械手位置高速并聯控制對象模型、進行控制約束參量分析的基礎上,進行控制律優化設計。本文提出一種基于變結構PID模糊控制的自動線機械手位置高速并聯控制技術,采用自適應的變結構模糊PID算法進行自動線機械手位置高速并聯控制律設計[13-15],得到變結構模糊PID模型為:
(6)
(7)


(8)

(9)

(10)
M=Mn+ΔM
(11)
(12)
結合Lyapunov函數進行參數自整定控制,進一步得到:
(13)
其中
(14)

(15)
令
(16)
式中:φcd為關節c與d之間形成的機械手調節角度。
在存在擾動誤差的情況下,通過誤差補償得到:
(17)
將Lyapunov函數定義為:
s=ce1+e2
(18)
則通過Lyapunov穩定性原理,對其求導得:
(19)
(20)
由此得到等效控制量ueq為:
(21)
3 測試實驗
3.1 實驗一
為了測試本文方法在實現自動線機械手位置高速并聯控制中的應用性能,進行一次仿真實驗,實驗采用MATLAB設計,利用三軸電子羅盤LSM303DLH進行機械手的位置參數采集,設置卡爾曼濾波器的階數為6,自動線機械手位置調節的加速度測量誤差為8m/s2,取PID神經元系數為b1=0.1,b2=-14.6,b3=14.0,d3=2cos(2πt),fd=0.5sin(πt),根據上述仿真參數,進行機械手位置高速并聯控制仿真,得到機械手的位置參數控制軌跡如圖1所示。
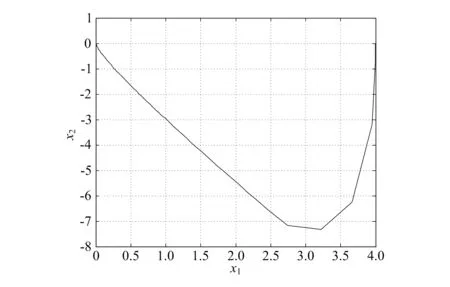
圖1 機械手位置參數控制軌跡分布
分析圖1可知,采用本文方法進行自動線機械手位置高速并聯控制,位置參量的跟蹤控制性能較好。進一步測試機械手控制收斂性,設置x1為橫向機械手控制的軌跡,x2為反向橫向機械手控制的軌跡,得到自動線機械手位置高速并聯控制收斂性曲線如圖2所示。
分析圖2可知,采用本文方法進行機械手控制,收斂性較好,攝動范圍在±0.12%以內,x1初始值為4,x2初始值為-2,在時間為2s時,x1,x2收斂為0,并且一直維持在0。由此可以看出,機械手控制的收斂性較好,控制能力較強,表示采用本文方法進行位置參數調節控制具有一定的優越性。
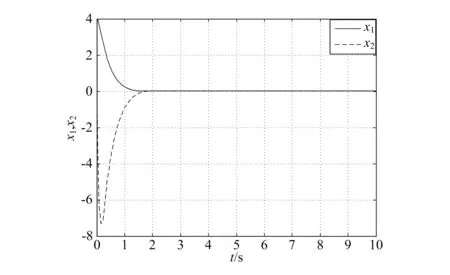
圖2 自動線機械手位置高速并聯控制收斂性曲線
3.2 實驗二
為測試本文設計的機械手控制的穩定性能,需要進行一次仿真實驗.實驗在MATLAB7.1平臺中完成,操作系統為Windows7,對機械手控制穩定性進行判定系統測試。
采用所設計的機械手控制穩定性進行判定系統測試,對其進行虛擬機械的特征穩定性能判定時,根據穩定頻率的不同虛擬機械圖像區域,采用擴展卡爾曼濾波算法,建立虛擬機械穩定性特征集,可大幅度提升虛擬機械特征穩定性的判定。分別對本文方法和傳統方法進行判定測試,通過多次試驗記錄兩種不同方法的判定時間,對比其穩定性能,結果如圖3所示。
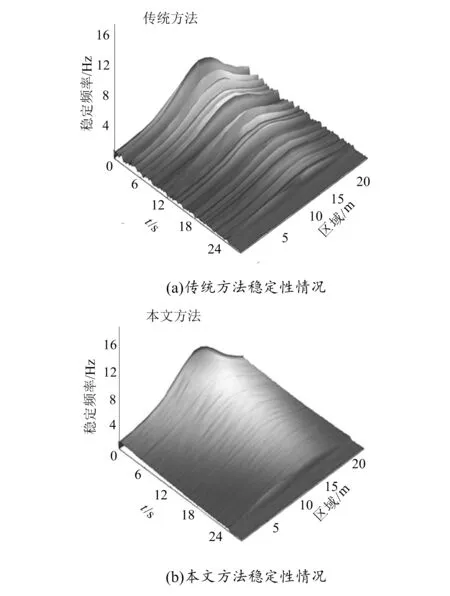
圖3 自動線機械手穩定性能對比圖
圖3(a)為傳統方法穩定性情況,其表面褶皺較多,說明機械手控制的穩定性能較弱。圖3(b)為本文方法穩定性情況,其表面較為光滑,褶皺較少,說明本文方法穩定性整體較強。由圖可知,相較于傳統方法,高速并聯控制技術使機械手控制的穩定性大幅度增加,充分說明機械手控制穩定性能更高,驗證了自動線機械手位置高速并聯控制技術的穩定性。
4 結束語
在裝配作業中,自動線機械手需要對作業的位置和高度等姿態參量進行自適應調節控制,并通過高速的并聯控制方法進行位姿調節,從而提高機械手作業的精準度和穩定性。本文提出一種基于變結構PID模糊控制的自動線機械手位置高速并聯控制算法,采用自適應的變結構模糊PID算法進行自動線機械手位置高速并聯控制律設計,實現控制律優化。驗證結果表明,本文方法進行機械手控制的穩定性能較好,位置參數的自適應調節能力較強。
參考文獻:
[1] PENG Xiongbin, GONG Guofang, LIAO Xiangping, et al . Modeling and odel identification of micro-position-control hydraulic system[J]. Journal of Mechanical Engineering, 2017, 53(22): 206-211.
[2] MA Zikui, CHEN Wenhua. Friction torque calculation method of ball bearings based on rolling creepage theory[J]. Journal of Mechanical Engineering, 2017, 53(22): 219-224.
[3] CHEN W,MA Z,GAO L,et al. Quasi-static analysis of thrust-loaded angular contact ball bearings part I:theoretical formulation[J]. Chinese Journal of Mechanical Engineering,2012,25(1):71-80.
[4] ZHAO Chunjiang,WANG Jianmei,HUANG Qingxue. Modification of raceway control theory on the dynamic equations group of high-speed ball bearings[J]. Transactions of the Chinese Society for Agricultural Machinery,2009,40(5):199-202.
[5] SU Bing,ZHANG Shuo,YANG Boyuan. Experiment for sliding friction characteristics of bearing steel GCr15[J]. Bearing,2015(2):39-42.
[6] CHEN S, ZANG M, XU W. A three-dimensional computational framework for impact fracture analysis of automotive laminated glass[J]. Computer Methods in Applied Mechanics and Engineering, 2015, 294:72-99.
[7] 黃婷, 孫立寧, 王振華, 等. 基于被動柔順的機器人拋磨力/位混合控制方法[J]. 機器人, 2017, 39(6): 776-785,794.
[8] 張秀麗,谷小旭,趙洪福,等.一種基于串聯彈性驅動器的柔順機械臂設計[J].機器人, 2016, 38(4):385-394.
[9] 楊明遠,孫漢旭,賈慶軒,等.七自由度空間機械臂避障路徑規劃方法[J].航天器工程,2011,20(4):65-71.
[10] 夏紅偉,翟彥斌,馬廣程,等.基于混沌粒子群優化算法的空間機械臂軌跡規劃算法[J].中國慣性技術學報,2014,22(2):211-216.
[11] LIU H, LIANG B, WANG X, et al. Autonomous path planning and experiment study of free-floating space robot for spinning satellite capturing[C]//13th International Conference on Control Automation Robotics & Vision. Piscataway, USA:IEEE, 2015:1573-1580.
[12] LIU S, ZHANG Q, ZHOU D. Obstacle avoidance path planning of space manipulator based on improved artificial potential field method[J]. Journal of the Institution of Engineers (India):Series C (Mechanical, Production, Aerospace and Marine Engineering), 2014, 95(1):31-39.
[13] UIJLINGS J R R, SANDE K E A V D,GEVERS T, et al. Selective search for object recognition[J]. International Journal of Computer Vision, 2013, 104(2):154-171.
[14] 李可,米捷.基于變結構PID的仿生機器人機電控制算法[J].河南工程學院學報(自然科學版),2016,28(2):32-37.
[15] 杜學丹, 蔡瑩皓, 魯濤, 等. 一種基于深度學習的機械臂抓取方法[J]. 機器人, 2017, 39(6): 820-828,837.
猜你喜歡
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
兒童故事畫報(2019年5期)2019-05-26 14:26:14
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
小雪花·成長指南(2015年4期)2015-05-19 14:47:56
