
遙感衛星數據接收天線抗陣風擾動技術研究
2018-05-05 05:42:50潘蒨李日尚
現代電子技術 2018年9期
潘蒨 李日尚
摘 要: 為解決陣風擾動對遙感衛星數據接收站窄波束天線跟蹤性能的影響問題,采用安裝天線罩抗風、使用大慣量電機增加天線轉動慣量以及優化跟蹤策略等方法。通過陣風擾動建模、伺服電機與傳動機構建模、控制環路建模以及Matlab仿真,得出減少陣風擾動影響的幾種方法,比較幾種方法的適用范圍、優缺點和可實現性,得出解決遙感衛星數據接收站窄波束天線抗陣風擾動的結論,為以后的工程項目建設提供參考。
關鍵詞: 陣風擾動; 天線跟蹤; 控制環路; 遙感接收; 轉動慣量; 窄波束天線
中圖分類號: TN820?34 文獻標識碼: A 文章編號: 1004?373X(2018)09?0021?03
Abstract: In order to weaken the influence of gust disturbance on tracking performance of narrow beam antenna of remote sensing satellite data receiving station, the methods of radome anti?gust installation, antenna rotary inertia increase with large inertia motor and optimization tracking strategy are adopted. The modeling of the anti?gust disturbance, control loop, servo motor and transmission mechanism, and Matlab simulation are carried out to get several methods for the reduction of gust disturbance. The adaptability, merits and feasibility of the methods are compared to obtain the conclusion that the narrow beam antenna of receiving station of remote sensing satellite data can resist the gust disturbance, which provides a reference for the future engineering project construction.
Keywords: gust disturbance; antenna tracking; control loop; remote sensing receiving; rotary inertia; narrow beam antenna
0 引 言
隨著星載傳感器的發展,遙感衛星需要下傳的數據量越來越大,速率越來越高,下傳數據占用的帶寬也同步增大[1],以致于目前在X頻段分配的帶寬不能滿足要求。為了大容量數據的實時傳輸,除了研究更加先進的編碼方法和調制技術之外,ka頻段的應用也是一種發展趨勢[2]。這種情況下接收天線的波束寬度非常窄,例如12 m口徑天線工作在25~27.5 GHz頻率時[3],其天線半功率波束寬度大約是0.06°。對于如此窄波束的接收天線,陣風擾動對天線跟蹤性能的影響必須得到高度關注。
1 建模與仿真
1.1 陣風擾動建模
自然風由穩態分量和動態分量兩個部分組成,穩態分量指在一段時間內的平均風速,動態分量指圍繞穩態風速隨機變化的分量[4]。對于穩態分量,當伺服跟蹤系統設計為二階無靜差系統時,其對跟蹤精度的影響可以忽略不計,真正影響跟蹤性能的是動態分量即陣風。
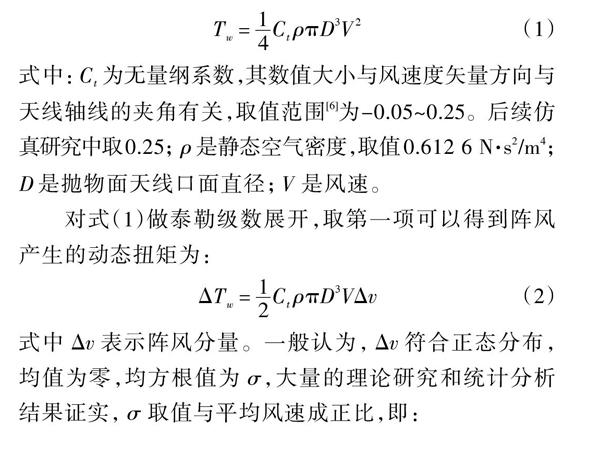
前人大量的研究和風洞試驗認為[5],風對對稱拋物面天線產生的扭轉力矩可以表示為:
1.3 控制環路建模
天線控制系統按照經典的電流環、速度環和位置環三環制建模[11],各環路也采用經典的比例積分調節器。
1.4 仿真計算及結果分析
在仿真計算中,假設天線口徑為12 m,工作頻率為26 000 MHz,波束寬度為0.06°,天線轉動慣量為2.2×105 kg·m2,天線結構諧振頻率為3.5 Hz,傳動速比為810,電機轉動慣量為0.1 kg·m2,伺服帶寬為1.2 Hz。取平均風速分別為10.7 m/s,13.8 m/s,17.1 m/s和20.8 m/s(對應蒲氏五級、六級、七級和八級最高風速)進行仿真計算。陣風(風速為13.8 m/s)擾動下天線角度輸出典型波形見圖2。各種風速下陣風擾動的天線角度變化統計值見表1。
如圖3所示,一般情況下跟蹤捕獲范圍大于半功率波束寬度。如果在系統角捕獲信號信噪比滿足要求的情況下,天線跟蹤系統角度捕獲范圍取1.5倍的半功率波束寬度,那么當陣風擾動使得天線輸出偏離0.75倍半功率波束寬度(本系統為0.045o)時,就可能會丟失目標。觀察仿真結果,對于五級風可以保證正常跟蹤,但跟蹤精度達不到0.1倍半功率波束寬度;對于六級風,偶爾會出現丟失目標的情況,而對于七級以上風速,基本上不能正常跟蹤。
2 克服陣風擾動方法
2.1 天線罩抗風擾
加裝天線罩對陣風擾動是個一勞永逸的解決方案。其主要缺點是無論在任何天氣情況下,天線罩都會帶來1~1.5 dB的G/T值性能惡化,使得系統接收性能下降;其次,ka頻段的天線罩價格不菲,特別是對于大型天線,天線罩是很昂貴的。
2.2 采用大慣量電機、不追求天線結構慣量小

陣風擾動作為一種外界力矩施加在天線反射面上,可以想象,如果天線面非常重、轉動慣量很大,風是吹不動的,也就形不成擾動。工程實踐中,要人為的去增加天線的重量和轉動慣量,成本將會增加很多,但不刻意去追求天線反射面輕型化(如用碳纖維材料)是可以做到的。增大伺服電機轉動慣量和增加天線轉動慣量的效果是等價的,同功率情況下,伺服電機轉動慣量有很寬的型譜,選擇余地很大,選用大慣量伺服電機[12]是比較經濟可行的方案。
表2表明,選用大慣量伺服電機并略微增大天線轉動慣量后,同樣的陣風擾動情況下,角度誤差明顯減小,可適應的風速最少提高一級。
2.3 跟蹤策略
在不加天線罩的情況下,對于ka頻段大型天線,當陣風較大時,偶爾會出現天線指向偏離目標較遠、導致自跟蹤失效的情況。這時,由于軌道預報精度不滿足ka頻段程序跟蹤精度要求[13],所以記憶跟蹤是解決這種現象的有效手段。記憶跟蹤可以在極坐標系實現,也可以在直角坐標系實現。為了濾除陣風擾動對記憶跟蹤的影響,必須采用直角坐標系的記憶跟蹤。遙感衛星數據接收站天線跟蹤系統直角坐標系記憶可以用以下算法實現。在正常跟蹤階段,根據天線角度輸出計算衛星在接收站地平坐標系的大地仰角[Ed,]再結合衛星軌道高度計算出衛星到接收站的距離[L,]然后實時計算衛星在天線視線坐標系的直角坐標[X,Y,Z,]并對[X,Y,Z]值適當濾波[15],具體計算公式如下:

3 結 論
本文仿真分析了陣風對大口徑ka頻段遙感衛星地面接收站天線跟蹤性能的影響,指出陣風影響是地面接收站建設必然面對而且必須重視的問題。對于可用度要求高、系統余量較大的系統,加裝天線罩是較好的解決方案;而對于可用度可以適當降低而又注重建設成本的情況,通過選用大慣量驅動電機和適當增加天線轉動慣量的方法以及采用合理先進的控制策略,提高天線系統在陣風擾動環境下的跟蹤能力。
參考文獻
[1] 郭良,李華芳.衛星通信手冊[M].北京:人民郵電出版社,1991.
GUO Liang, LI Huafang. Hand book on satellite communications [M]. Beijing: Posts & Telecom Press, 1991.
[2] 劉嘉興.飛行器測控與信息傳輸技術[M].北京:國防工業出版社,2011.
LIU Jiaxing. Spacecraft TT&C and information transmission technology [M]. Beijing: National Defense Industry Press, 2011.
[3] 樊昌信,曹麗娜.通信原理[M].北京:國防工業出版社,2016.
FAN Changxin, CAO Lina. Communication principle [M]. Beijing: National Defense Industry Press, 2016.
[4] GAWRONSKI W. Wind gust models derived from field data [EB/OL]. [1995?09?11]. http://tmo.jpl.nasa.gov/tmo/progress?report/42?123/123G.pdf.
[5] GAWRONSKI Wodek. Modeling and control of antennas and telescopes [M]. Berlin: Springer, 2008.
[6] GAWRONSKI W, BIENKIEWICZ B, HILL R E. Pointing?error simulations of the DSS?13 antenna due to wind disturbances [EB/OL]. [1991?10?09]. http://tmo.jpl.nasa.gov/tmo/progres?report/42?108/108J.pdf.
[7] 龔振邦,陳守春.伺服機械傳動裝置[M].北京:國防工業出版社,1980.
GONG Zhenbang, CHEN Shouchun. Servo mechanical transmission device [M]. Beijing: National Defense Industry Press, 1980.
[8] GAWRONSKI W. Three models of wind?gust disturbances for the analysis of antenna pointing accuracy [J]. IEEE antennas & propagation magazine, 2004, 46(1): 50?58.
[9] GAWRONSKI W, BIENKIEWICZ B, HILL R E. Wind?induced dynamics of a deep space network antenna [J]. Journal of sound and vibration, 1994, 178(1): 67?77.
[10] 張子旭.自動控制系統分析與設計[M].西安:陜西科學技術出版社,1997.
ZHANG Zixu. Automatic control system analysis and design [M]. Xian: Shaanxi Science and Technology Press, 1997.
[11] 劉浩,韓晶.Matlab R2014a 完全自學一本通[M].北京:電子工業出版社,2015.
LIU Hao, HAN Jing. Matlab R2014a is a complete self?study [M]. Beijing: Electronic Industry Press, 2015.
[12] 夏福娣.防空導彈制導雷達伺服系統[M].北京:宇航出版社,1996:266?275.
XIA Fudi. Servo system of air defense missile guidance radar [M]. Beijing: Yuhang Publishing House, 1996: 266?275.
[13] 韋棟,趙長印.SGP4/SDP4模型精度分析[J].天文學報,2009,50(3):332?339.
WEI Dong, ZHAO Changyin. Precision analysis of SGP4/SDP4 model [J]. Journal of astronomy, 2009, 50(3): 332?339.
[14] 朱鐘淦,葉尚輝.天線結構設計[M].北京:國防工業出版社,1980.
ZHU Zhonggan, YE Shanghui. Antenna structure design [M]. Beijing: National Defense Industry Press, 1980.
