
運(yùn)動(dòng)訓(xùn)練中人體踝關(guān)節(jié)安全角度優(yōu)化控制系統(tǒng)
2018-05-05 05:42:50張超
現(xiàn)代電子技術(shù) 2018年9期
張超
摘 要: 為解決傳統(tǒng)踝關(guān)節(jié)安全角度控制系統(tǒng)存在PWM控制單元穩(wěn)定性較差、踝關(guān)節(jié)角度控制精確度較低等問(wèn)題,設(shè)計(jì)了人體踝關(guān)節(jié)安全角度優(yōu)化控制系統(tǒng)。通過(guò)判斷踝關(guān)節(jié)在運(yùn)動(dòng)過(guò)程中生理特征的變化情況,完成人體踝關(guān)節(jié)安全角度的確定。通過(guò)電源模塊設(shè)計(jì)、傳感器模塊設(shè)計(jì)、串口通信模塊設(shè)計(jì),完成新型優(yōu)化控制系統(tǒng)的硬件部分設(shè)計(jì)。通過(guò)主程序設(shè)計(jì)、功能函數(shù)設(shè)計(jì)、PWM控制單元的加固設(shè)計(jì),完成新型優(yōu)化控制系統(tǒng)的軟件部分設(shè)計(jì)。模擬系統(tǒng)運(yùn)行環(huán)境,設(shè)計(jì)對(duì)比實(shí)驗(yàn)結(jié)果表明,優(yōu)化后系統(tǒng)與傳統(tǒng)系統(tǒng)相比,PWM控制單元的穩(wěn)定性、踝關(guān)節(jié)角度控制精確度均得到大幅提升。
關(guān)鍵詞: 運(yùn)動(dòng)訓(xùn)練; 人體踝關(guān)節(jié); 安全角度; 優(yōu)化控制; 生理特征; 串口通信; 功能函數(shù)
中圖分類號(hào): TN710?34; TP273 文獻(xiàn)標(biāo)識(shí)碼: A 文章編號(hào): 1004?373X(2018)09?0100?05
Abstract: The traditional safety angle control system of ankle joint has the disadvantages of poor stability of PWM control unit and low control accuracy of ankle joint angle. Therefore, a safety angle optimal control system of the human ankle joint was designed. The variation condition of physiological characteristics during the movement of the ankle joint is judged to determine the safety angle of the human ankle joint. The design of the power module, sensor module and serial communication module is used to realize the design of the hardware of the new optimization control system. The design of the main program, performance function and PWM control unit reinforcement is used to realize the design of the software of the new optimization control system. The operating environment of the system is simulated. The contrast experiment results show that the stability of the PWM control unit and control accuracy of the ankle angle are greatly improved after system optimization.
Keywords: exercise training; ankle joint; safety angle; optimal control; physiological characteristic; serial communication; performance function
0 引 言
傳統(tǒng)踝關(guān)節(jié)安全角度控制系統(tǒng)利用VICON MX技術(shù)模擬人體步態(tài)實(shí)驗(yàn),并通過(guò)捕獲實(shí)驗(yàn)中人體踝關(guān)節(jié)的周期性變化關(guān)系,確定關(guān)節(jié)安全角度的周期性變化規(guī)律。再利用最小二乘法將人體踝關(guān)節(jié)安全角度的變化曲線分解成多個(gè)區(qū)域指標(biāo),并對(duì)每一段曲線進(jìn)行取樣分析,根據(jù)具體分析結(jié)果得到建立控制系統(tǒng)的各項(xiàng)參數(shù)。這種方法雖然最大程度上保證了參數(shù)的真實(shí)性,但因計(jì)算步驟過(guò)于復(fù)雜,常導(dǎo)致踝關(guān)節(jié)角度控制精確度較低[1?2]。傳統(tǒng)系統(tǒng)應(yīng)用PID原理完成對(duì)PWM控制單元的搭建。這種方法雖然在一定程度上提升了系統(tǒng)的運(yùn)行可行性,但單純的PID原理不能為PWM控制單元提供較強(qiáng)的穩(wěn)定性。為解決傳統(tǒng)系統(tǒng)踝關(guān)節(jié)角度控制精確度較低、PWM控制單元穩(wěn)定性較差等問(wèn)題,本文設(shè)計(jì)人體踝關(guān)節(jié)安全角度優(yōu)化控制系統(tǒng)。對(duì)比實(shí)驗(yàn)結(jié)果表明新型系統(tǒng)與傳統(tǒng)系統(tǒng)相比具備更強(qiáng)的實(shí)用性價(jià)值。
1 運(yùn)動(dòng)訓(xùn)練中人體踝關(guān)節(jié)安全角度確定
1.1 人體踝關(guān)節(jié)生理特征
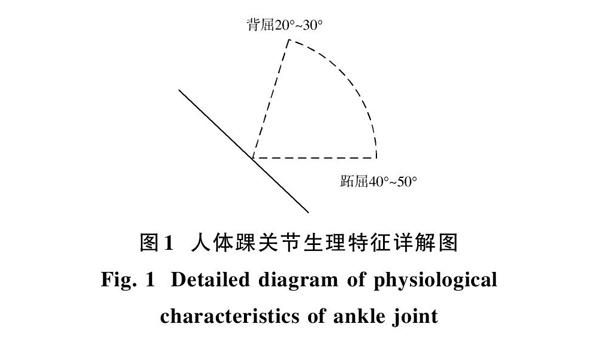
踝關(guān)節(jié)可以穩(wěn)定支撐人體重量,是保證人體下肢靈活運(yùn)動(dòng)的關(guān)鍵組織。當(dāng)人體處于高速運(yùn)動(dòng)狀態(tài)時(shí),姿勢(shì)會(huì)發(fā)生迅速調(diào)整,由于人體踝關(guān)節(jié)具有內(nèi)外翻、跖屈背屈、旋轉(zhuǎn)等多項(xiàng)功能,才使得人體向地面下落時(shí)可進(jìn)行一定的緩沖[3]。當(dāng)人體保持運(yùn)動(dòng)狀態(tài)時(shí),人的下肢是主要負(fù)重環(huán)節(jié),為保證整個(gè)運(yùn)動(dòng)階段人體的負(fù)荷情況始終為零,踝關(guān)節(jié)的受力角度也不斷發(fā)生改變。通常情況下,這種變化趨勢(shì)如圖1所示。
1.2 基于特征分析的踝關(guān)節(jié)安全角度確定
踝關(guān)節(jié)安全角度的確定為后續(xù)控制系統(tǒng)設(shè)計(jì)提供了基礎(chǔ)數(shù)據(jù)變化范圍。根據(jù)人體踝關(guān)節(jié)的生理特征可知,在運(yùn)動(dòng)訓(xùn)練過(guò)程中,當(dāng)人體小腿與地面保持垂直狀態(tài)時(shí),可將踝關(guān)節(jié)的安全角度定義為零[4]。為簡(jiǎn)化踝關(guān)節(jié)安全角度的確定流程,可將其變化過(guò)程中產(chǎn)生的每個(gè)安全角度用圖2表示。
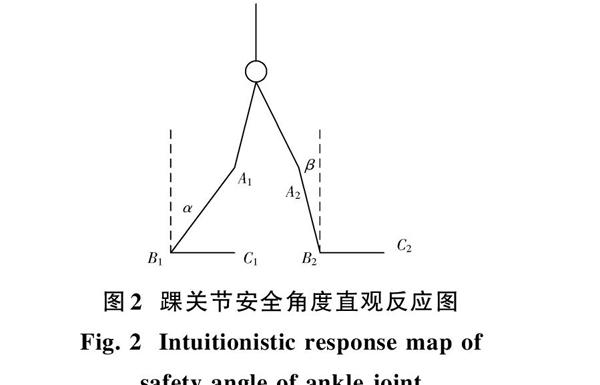
根據(jù)圖2可知,當(dāng)人體處于運(yùn)動(dòng)訓(xùn)練狀態(tài)時(shí),[A1,A2]所處位置會(huì)發(fā)生改變,進(jìn)而導(dǎo)致[∠A1B1C1,∠A2B2C2]大小發(fā)生改變,作為[∠A1B1C1,∠A2B2C2]的余角[∠α,∠β]的大小也隨之改變,但其安全角度的變化范圍始終保持在0°~180°。
2 基于安全角度信息的優(yōu)化控制系統(tǒng)硬件設(shè)計(jì)
在運(yùn)動(dòng)訓(xùn)練中,人體踝關(guān)節(jié)安全角度確定后,可按如下步驟完成基于安全角度信息的控制系統(tǒng)硬件設(shè)計(jì)。
2.1 電源模塊設(shè)計(jì)
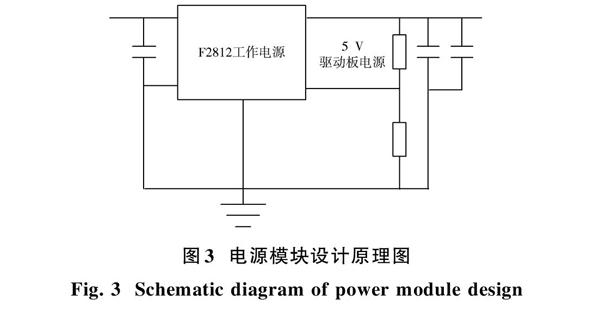
運(yùn)動(dòng)訓(xùn)練中,人體踝關(guān)節(jié)安全角度優(yōu)化控制系統(tǒng)的電源模塊包括F2812工作電源、5 V驅(qū)動(dòng)板電源兩部分。在電源控制面板上,5 V驅(qū)動(dòng)板電源為踝關(guān)節(jié)安全角度采集裝置提供直接電力支持。踝關(guān)節(jié)安全角度采集裝置采用低電流、低功耗的降壓模板作為搭建基礎(chǔ),這種降壓模板能承受的額定電流相對(duì)較小,而系統(tǒng)直接與220 V家用電源相連,過(guò)大的電流易造成系統(tǒng)原件損壞,而5 V驅(qū)動(dòng)板電源可有效解決額定電流的轉(zhuǎn)化[5]。F2812工作電源是優(yōu)化控制系統(tǒng)的中心供電裝置,系統(tǒng)中所有耗電原件均可與該裝置直接相連。具體電源模塊設(shè)計(jì)原理圖如圖3所示。
2.2 傳感器模塊設(shè)計(jì)
優(yōu)化控制系統(tǒng)的傳感器模塊與電源模塊直接相連,獲得額定限度為220 V的家用電壓。當(dāng)人體踝關(guān)節(jié)的安全角度在運(yùn)動(dòng)訓(xùn)練過(guò)程中發(fā)生改變時(shí),傳感器模塊中的共軸會(huì)發(fā)生轉(zhuǎn)動(dòng),促使與電位計(jì)相連轉(zhuǎn)動(dòng)桿的安全角度發(fā)生改變,且其變化幅度與人體踝關(guān)節(jié)安全角度變化幅度相同[6]。傳感器模塊的本質(zhì)相當(dāng)于一個(gè)阻值無(wú)限大的滑動(dòng)變阻器,當(dāng)人體踝關(guān)節(jié)安全角度發(fā)生變化時(shí),滑動(dòng)變阻器觸頭位置隨之改變,即接入電路的滑動(dòng)變阻器的阻值發(fā)生變化,此時(shí)傳感器模塊兩端的限定電壓隨著改變。利用電路中外界電壓表可測(cè)量出傳感器模塊兩端的真實(shí)電壓值,再利用式(1)完成真實(shí)電壓、人體踝關(guān)節(jié)安全角度變化幅度間的關(guān)系轉(zhuǎn)化:
2.3 串口通信模塊設(shè)計(jì)
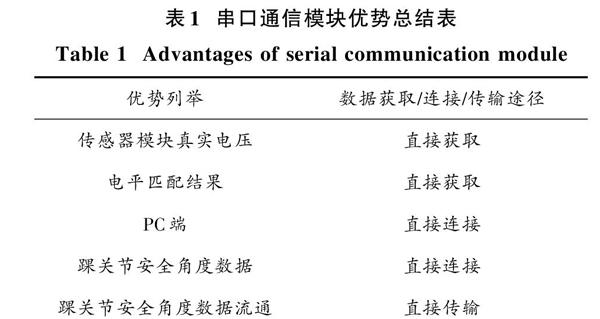
優(yōu)化控制系統(tǒng)的串口通信模塊可直接獲得在運(yùn)動(dòng)訓(xùn)練前、后傳感器模塊兩端真實(shí)電壓的變化情況,且該模塊與中心系統(tǒng)PC端相連,可將具體數(shù)據(jù)輸入數(shù)據(jù)庫(kù)中做短暫儲(chǔ)存。當(dāng)運(yùn)動(dòng)訓(xùn)練前、后傳感器模塊兩端真實(shí)電壓產(chǎn)生的電平不匹配時(shí),串口通信模塊不能為人體踝關(guān)節(jié)安全角度數(shù)據(jù)建立通信連接[7?8]。為保證人體踝關(guān)節(jié)安全角度數(shù)據(jù)的正常傳輸,設(shè)置具有高穩(wěn)定性的電平轉(zhuǎn)換芯片,一方面平衡運(yùn)動(dòng)訓(xùn)練前、后傳感器模塊兩端真實(shí)電壓所產(chǎn)生電平;另一方面提升系統(tǒng)對(duì)變化角度的控制精準(zhǔn)度。優(yōu)化控制系統(tǒng)串口通信模塊的優(yōu)勢(shì)如表1所示。
3 基于安全角度信息的優(yōu)化控制系統(tǒng)軟件設(shè)計(jì)

為保證優(yōu)化控制系統(tǒng)的正常運(yùn)行,還需按照如下步驟完成系統(tǒng)的軟件模塊搭建。
3.1 軟件主程序設(shè)計(jì)
優(yōu)化控制系統(tǒng)的軟件主程序具備優(yōu)化系統(tǒng)設(shè)置、恢復(fù)連動(dòng)桿位置等功能。當(dāng)優(yōu)化控制系統(tǒng)進(jìn)入工作狀態(tài)時(shí),人體開(kāi)始運(yùn)動(dòng)訓(xùn)練,踝關(guān)節(jié)安全角度也隨之發(fā)生變化。此時(shí),電源模塊開(kāi)始向外供電,傳感器模塊在接收到電力資源后,促使轉(zhuǎn)動(dòng)桿位置發(fā)生移動(dòng)[9?10]。串口通信模塊在感受到轉(zhuǎn)動(dòng)桿安全角度的變化后,會(huì)自動(dòng)為人體踝關(guān)節(jié)安全角度數(shù)據(jù)與中心系統(tǒng)PC端建立通信連接。當(dāng)人體運(yùn)動(dòng)訓(xùn)練結(jié)束后,上述各環(huán)節(jié)會(huì)及時(shí)歸位,但因模塊與模塊間連接電能的耗損,導(dǎo)致部分環(huán)節(jié)歸位后位置與初始位置不一致,此時(shí)軟件系統(tǒng)啟動(dòng)主程序,推動(dòng)各環(huán)節(jié)回到初始位置,為系統(tǒng)后續(xù)運(yùn)行做準(zhǔn)備。具體軟件主程序工作流程如圖4所示。
3.2 功能函數(shù)設(shè)計(jì)
當(dāng)優(yōu)化控制系統(tǒng)軟件主程序運(yùn)行結(jié)束后,中心系統(tǒng)會(huì)對(duì)軟件功能模塊發(fā)出指令,申請(qǐng)調(diào)用部分功能函數(shù)。優(yōu)化控制系統(tǒng)的功能函數(shù)的生成需利用運(yùn)動(dòng)訓(xùn)練前、后傳感器模塊兩端的真實(shí)電壓[11]。設(shè)運(yùn)動(dòng)訓(xùn)練前傳感器模塊兩端的真實(shí)電壓為[U0,]運(yùn)動(dòng)訓(xùn)練后傳感器模塊兩端的真實(shí)電壓為[U,]則優(yōu)化控制系統(tǒng)的一般功能函數(shù)可表示為:
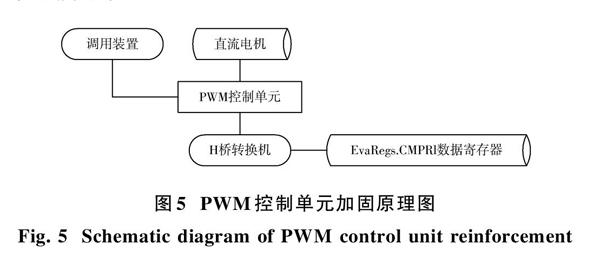
3.3 PWM控制單元的加固設(shè)計(jì)
PWM控制單元中配備調(diào)用優(yōu)化控制系統(tǒng)一般功能函數(shù)的裝置,且內(nèi)嵌一臺(tái)簡(jiǎn)易直流電機(jī)。傳統(tǒng)控制系統(tǒng)的PWM控制單元采用EvaRegs.CMPRl數(shù)據(jù)寄存器,且處于該單元內(nèi)所有人體踝關(guān)節(jié)安全角度數(shù)據(jù)都可以產(chǎn)生不固定的比特波形。為了全方位地統(tǒng)計(jì)每組數(shù)據(jù)的波形,EvaRegs.CMPRl數(shù)據(jù)寄存器必須經(jīng)過(guò)反復(fù)校驗(yàn)才可得出最終結(jié)果,不僅工作流程十分復(fù)雜,也大幅度地降低了PWM控制單元的穩(wěn)定性[12?13]。優(yōu)化控制系統(tǒng)的PWM控制單元采用H橋轉(zhuǎn)換機(jī),統(tǒng)一人體踝關(guān)節(jié)安全角度數(shù)據(jù)的比特波形,從根本上縮減EvaRegs.CMPRl數(shù)據(jù)寄存器的工作流程,并在此基礎(chǔ)上提升PWM控制單元的整體穩(wěn)定性。詳細(xì)的PWM控制單元的加固原理如圖5所示。
4 實(shí)驗(yàn)結(jié)果與分析
上述過(guò)程完成了運(yùn)動(dòng)訓(xùn)練中人體踝關(guān)節(jié)安全角度優(yōu)化控制系統(tǒng)的設(shè)計(jì)。為驗(yàn)證該系統(tǒng)的實(shí)用性價(jià)值,以2臺(tái)配置相同的計(jì)算機(jī)作為實(shí)驗(yàn)對(duì)象,分別令其搭載傳統(tǒng)系統(tǒng)和優(yōu)化后系統(tǒng),前者作為對(duì)照組,后者作為實(shí)驗(yàn)組,具體實(shí)驗(yàn)步驟如下。
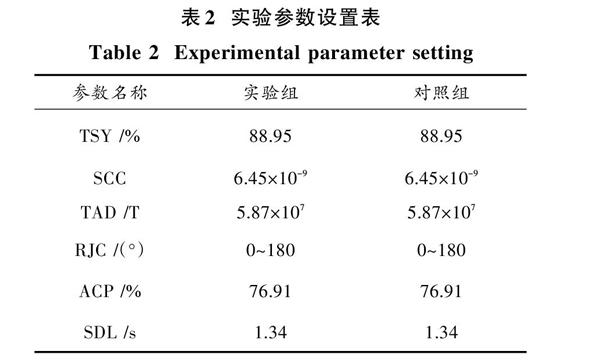
4.1 實(shí)驗(yàn)參數(shù)設(shè)置
實(shí)驗(yàn)開(kāi)始前,按照表2完成相關(guān)實(shí)驗(yàn)參數(shù)的設(shè)置。
4.2 PWM控制單元穩(wěn)定性對(duì)比
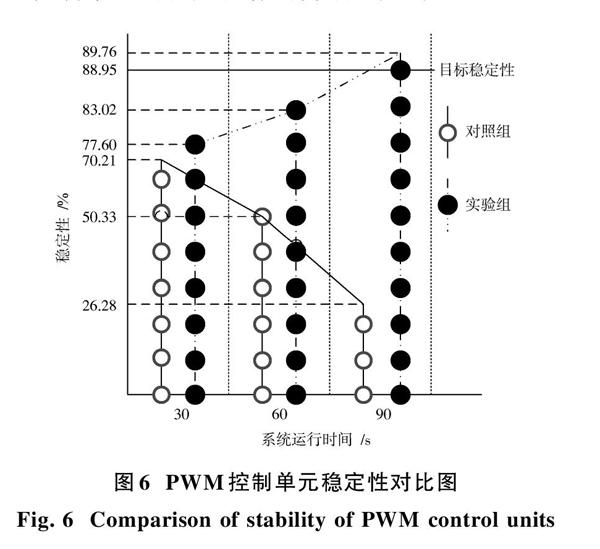
完成實(shí)驗(yàn)參數(shù)設(shè)置后,令實(shí)驗(yàn)組、對(duì)照組計(jì)算機(jī)同時(shí)進(jìn)入工作狀態(tài),并保持相同的工作時(shí)長(zhǎng),分別記錄兩組PWM控制單元的穩(wěn)定性,具體實(shí)驗(yàn)結(jié)果如圖6所示。
分析圖6可知,隨著系統(tǒng)運(yùn)行時(shí)間的增加,對(duì)照組系統(tǒng)PWM控制單元的穩(wěn)定性呈現(xiàn)逐漸下降的趨勢(shì),當(dāng)系統(tǒng)運(yùn)行時(shí)間為90 s時(shí),PWM控制單元的穩(wěn)定性達(dá)到最小值26.28%。隨著系統(tǒng)運(yùn)行時(shí)間的增加,實(shí)驗(yàn)組系統(tǒng)PWM控制單元的穩(wěn)定性呈現(xiàn)逐漸上升的趨勢(shì),當(dāng)系統(tǒng)運(yùn)行時(shí)間為30 s時(shí),PWM控制單元的穩(wěn)定性達(dá)到最小值77.60%,遠(yuǎn)高于對(duì)照組。所以,可證明應(yīng)用運(yùn)動(dòng)訓(xùn)練中人體踝關(guān)節(jié)安全角度優(yōu)化控制系統(tǒng)能夠?qū)WM控制單元的穩(wěn)定性提升50%以上。
4.3 踝關(guān)節(jié)角度控制精確度對(duì)比
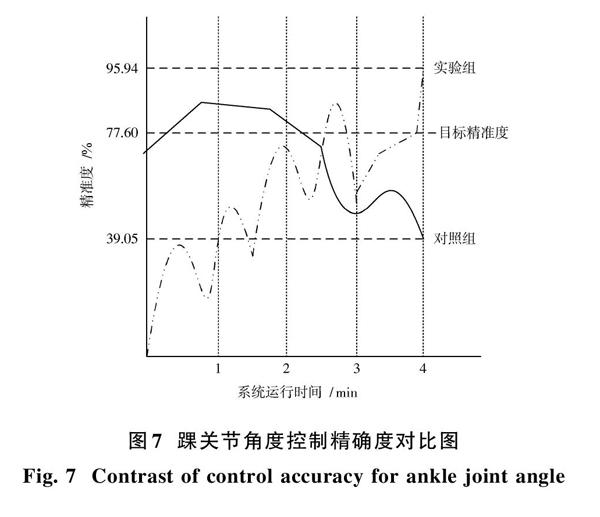
完成PWM控制單元穩(wěn)定性的對(duì)比后,令2臺(tái)計(jì)算機(jī)繼續(xù)保持原有的工作狀態(tài),分別記錄4 min時(shí)間內(nèi),兩組系統(tǒng)對(duì)踝關(guān)節(jié)角度的控制精準(zhǔn)度,具體實(shí)驗(yàn)結(jié)果如圖7所示。
分析圖7可知,隨著系統(tǒng)運(yùn)行時(shí)間的增加,對(duì)照組系統(tǒng)對(duì)踝關(guān)節(jié)角度的控制精準(zhǔn)度基本呈現(xiàn)下降的趨勢(shì),達(dá)到額定時(shí)間4 min時(shí),系統(tǒng)對(duì)踝關(guān)節(jié)角度的控制精準(zhǔn)度為39.05%。隨著系統(tǒng)運(yùn)行時(shí)間的增加,實(shí)驗(yàn)組系統(tǒng)對(duì)踝關(guān)節(jié)角度的控制精準(zhǔn)度呈現(xiàn)逐步上升的趨勢(shì),達(dá)到額定時(shí)間4 min時(shí),系統(tǒng)對(duì)踝關(guān)節(jié)角度的控制精準(zhǔn)度為95.94%,遠(yuǎn)高于對(duì)照組。所以,可證明應(yīng)用運(yùn)動(dòng)訓(xùn)練中人體踝關(guān)節(jié)安全角度優(yōu)化控制系統(tǒng)后, 踝關(guān)節(jié)角度控制精準(zhǔn)度能夠達(dá)到普通系統(tǒng)的2倍以上。
5 結(jié) 語(yǔ)
本文設(shè)計(jì)了人體踝關(guān)節(jié)安全角度優(yōu)化控制系統(tǒng),實(shí)驗(yàn)結(jié)果表明,運(yùn)動(dòng)訓(xùn)練中人體踝關(guān)節(jié)安全角度優(yōu)化控制系統(tǒng)與普通系統(tǒng)相比,PWM控制單元穩(wěn)定性更強(qiáng),踝關(guān)節(jié)角度控制結(jié)果更精準(zhǔn),確實(shí)具備極強(qiáng)的應(yīng)用價(jià)值。
參考文獻(xiàn)
[1] 尹清松,廖前芳,周前祥,等.基于JACK的駕駛姿勢(shì)的下肢關(guān)節(jié)受力及舒適度分析[J].航天醫(yī)學(xué)與醫(yī)學(xué)工程,2016,29(6):440?445.
YIN Qingsong, LIAO Qianfang, ZHOU Qianxiang, et al. Ana?lysis of lower limb joint torque and comfort in driving posture based on JACK [J]. Space medicine & medical engineering, 2016, 29(6): 440?445.
[2] 徐大鵬,杜艷艷.身體功能訓(xùn)練對(duì)羽毛球運(yùn)動(dòng)員膝、踝關(guān)節(jié)穩(wěn)定性及足底壓力影響的實(shí)驗(yàn)研究[J].沈陽(yáng)體育學(xué)院學(xué)報(bào),2017,36(1):86?91.
XU Dapeng, DU Yanyan. Experimental study on influence of badminton athletes′ knee and ankle stability and plantar pressure by body function training [J]. Journal of Shenyang Sport University, 2017, 36(1): 86?91.
[3] 李立萍,解麗君,郝娜,等.非T細(xì)胞結(jié)合肽(FNS007)對(duì)小鼠膠原性關(guān)節(jié)炎的抑制作用及其機(jī)制[J].中國(guó)藥理學(xué)通報(bào),2017,33(5):611?616.
LI Liping, XIE Lijun, HAO Na, et al. Inhibition and mechanisms of non?T cell binding peptide (FNS007) in collagen Ⅱ?induced arthritis mice models [J]. Chinese pharmacological bulletin, 2017, 33(5): 611?616.
[4] 馬騰,王謙,路遙,等.非剛性與傳統(tǒng)螺釘內(nèi)固定治療踝關(guān)節(jié)骨折伴下脛腓聯(lián)合損傷的療效比較[J].中華創(chuàng)傷雜志,2016,32(8):677?682.
MA Teng, WANG Qian, LU Yao, et al. Clinical outcomes of endobutton versus traditional screw fixation for distal tibiofibular syndesmosis in ankle fractures [J]. Chinese journal of trauma, 2016, 32(8): 677?682.
[5] 吳金龍,陸阿明.不同類型踝關(guān)節(jié)護(hù)具對(duì)功能性踝關(guān)節(jié)不穩(wěn)者靜態(tài)姿勢(shì)穩(wěn)定性的影響[J].中國(guó)運(yùn)動(dòng)醫(yī)學(xué)雜志,2017,36(3):232?235.
WU Jinlong, LU Aming. Effects of different types of ankle brace on the static postural stability in patients with functional ankle instability [J]. Chinese journal of sports medicine, 2017, 36(3): 232?235.
[6] 王晶晶,劉靜,裴天仙,等.益腎蠲痹丸對(duì)Ⅱ型膠原致關(guān)節(jié)炎大鼠踝關(guān)節(jié)組織病理改變的影響及其機(jī)制研究[J].中草藥,2016,47(17):3064?3069.
WANG Jingjing, LIU Jing, PEI Tianxian, et al. Study on effects of Yishen Juanbi Pill on histopathologic changes in ankle joint of type Ⅱ collagen induced arthritis in rats and its mechanism [J]. Chinese traditional and herbal drugs, 2016, 47(17): 3064?3069.
[7] 梁炳寅,李坤,王予彬,等.本體感覺(jué)功能與慢性踝關(guān)節(jié)不穩(wěn)相關(guān)性的初步研究[J].中華物理醫(yī)學(xué)與康復(fù)雜志,2016,38(11):850?852.
LIANG Bingyin, LI Kun, WANG Yubin, et al. Relationship between proprioception and chronic ankle instability [J]. Chinese journal of physical medicine and rehabilitation, 2016, 38(11): 850?852.
[8] 葉長(zhǎng)青,熊寶林,許晶莉,等.地面反射型踝足矯形器對(duì)學(xué)齡期痙攣型腦性癱瘓兒童下肢異常姿勢(shì)矯正的效果研究[J].中國(guó)康復(fù)醫(yī)學(xué)雜志,2016,31(12):1359?1362.
YE Changqing, XIONG Baolin, XU Jingli, et al. Effect of ground reflex ankle foot orthosis on the correction of abnormal postural posture in children with spastic cerebral palsy [J]. Chinese journal of rehabilitation medicine, 2016, 31(12): 1359?1362.
[9] 許軼,王楚懷,韓秀蘭,等.連續(xù)型對(duì)稱指數(shù)應(yīng)用于健康青年女性矢狀面下肢關(guān)節(jié)角度對(duì)稱性的研究[J].實(shí)用醫(yī)學(xué)雜志,2017,33(1):87?91.
XU Yi, WANG Chuhuai, HAN Xiulan, et al. Efficacy of a continuous symmetry index in detecting the symmetry of sagittal lower limb joint angle at 3?D gait analysis of healthy youth female [J]. The journal of practical medicine, 2017, 33(1): 87?91.
[10] 張宏寧,朱永展,李雪,等.踝關(guān)節(jié)骨折中外踝移位對(duì)脛距關(guān)節(jié)接觸影響的三維有限元分析[J].中華創(chuàng)傷骨科雜志,2017,19(9):769?774.
ZHANG Hongning, ZHU Yongzhan, LI Xue, et al. Influence of various displacement modes of lateral malleolus associated with ankle fracture on tibiotalar joint contact: a finite element analysis [J]. Chinese journal of orthopaedic trauma, 2017, 19(9): 769?774.
[11] 李大成,付瑩,陳望軍,等.多孔鈦合金支撐棒在踝關(guān)節(jié)損傷中的應(yīng)用及生物力學(xué)性能[J].中國(guó)組織工程研究,2017,21(34):5413?5417.
LI Dacheng, FU Ying, CHEN Wangjun, et al. Application and biomechanical study of porous titanium alloy support rod in ankle joint injuries [J]. Chinese journal of tissue enginee?ring research, 2017, 21(34): 5413?5417.
[12] 吳肖潔,李翰君,劉卉,等.不同壓力彈力襪對(duì)青年女性穿高跟鞋步行時(shí)下肢關(guān)節(jié)負(fù)荷及肌肉疲勞的影響[J].中國(guó)康復(fù)醫(yī)學(xué)雜志,2016,31(9):995?1000.
WU Xiaojie, LI Hanjun, LIU Hui, et al. Effects of different stress and elastic stockings on the lower limb joint load and muscle fatigue of young women wearing high heels on foot [J]. Chinese journal of rehabilitation medicine, 2016, 31(9): 995?1000.
[13] 郭永明,游曉科,劉觀起.基于靈敏度分析的直驅(qū)永磁風(fēng)機(jī)并網(wǎng)系統(tǒng)小干擾穩(wěn)定優(yōu)化研究[J].中國(guó)電力,2017,50(2):144?149.
GUO Yongming, YOU Xiaoke, LIU Guanqi. Small signal stability optimal designing of direct?driven permanent magnet wind power system based on sensitivity analysis method [J]. Electric power, 2017, 50(2): 144?149.
