基于激光雷達技術的粉塵污染源監測
2018-05-07 00:39:45李正強謝劍鋒劉小強謝一凇陳興峰
中國環境監測 2018年2期
關鍵詞:信號
呂 陽,李正強,謝劍鋒,張 豐,劉小強,劉 詔,謝一凇,許 華,陳興峰
1.中國科學院遙感與數字地球研究所國家環境保護衛星遙感重點實驗室,北京 100101 2.河北省環境監測中心站,河北 石家莊 050000 3.中國科學院大學,北京 100049
隨著經濟快速發展,城市規模不斷擴大,大氣污染已經嚴重影響了人們的生產生活[1-2];雖然大部分排污企業已按要求安裝了污染排放在線監測儀器來采集煙氣流速、濃度及硫化物和氮化物等含量信息。但是各廠家的監測儀器儀表不盡相同,監測數據對比性差,使得大量觀測數據無法共享使用。同時,這些儀器儀表由于安裝和監管等問題,無法完全排除人為影響。
遙感技術用于大氣污染探測,具有客觀及非接觸等優勢[3-4]。但是,常用的被動遙感,一方面受限于輻射源[5],無法實現全天時探測;另一方面受限于面觀測,只能獲得柱信息[6]。激光雷達技術作為探測大氣顆粒物的新型主動遙感工具[7-8],在顆粒物變化監測方面具有全天時、大范圍、廓線探測等獨特優勢。作為一種新型技術,激光雷達在應用到實際監測過程中時,還存在一些技術和應用方面的問題,需要通過現場實驗進行梳理以獲得解決和發展。研究通過實驗,對一個污染源的排污進行激光雷達監測,分析煙塵排放強度與激光雷達信號間的關系,驗證激光雷達技術用于粉塵污染源排放監測的可行性。
1 實驗部分
1.1 主要儀器
實驗采用地基微脈沖激光雷達作為主要的觀測儀器,該儀器型號為CE370-2(法國)[9]。它根據大氣對激光的散射、吸收等物理效應,通過定量分析激光大氣回波,進行大氣參數探測。主要由激光器、發射及接收望遠鏡系統、光電轉換系統、高速數據接收處理系統和軟件系統組成。高方向性、高亮度和高脈沖重復率,使激光雷達可以對大范圍大氣進行實時快速監測。此外,微脈沖技術具有對人眼安全的優勢。激光雷達的主要技術參數見表1。
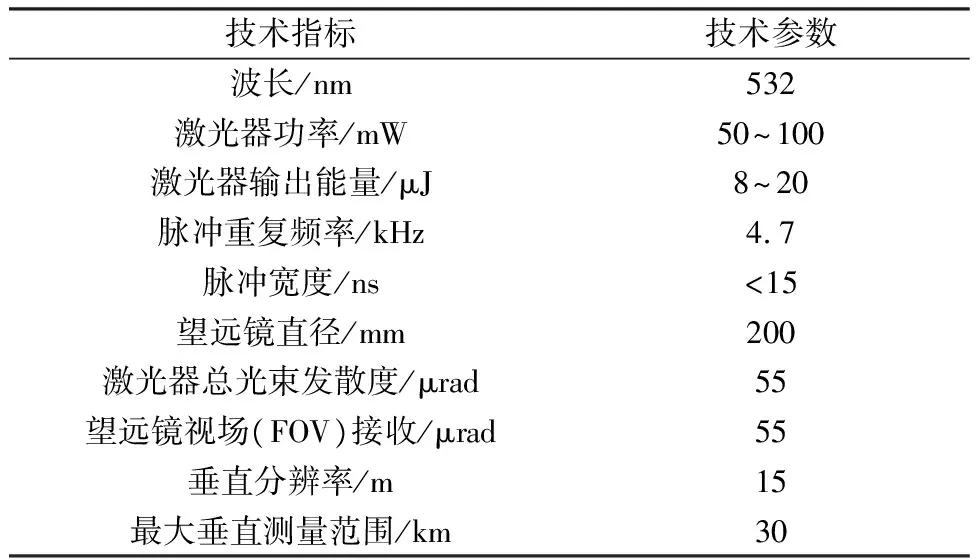
表1 CE370-2型微脈沖激光雷達主要技術參數
1.2 實驗地點
實驗地點位于河北省西南部,太行山中段東麓,地勢西高東低。區域內公路、煤場、礦場、水泥廠等散布。研究以區域內水泥廠的一個排污煙囪為觀測目標(圖1),通過激光雷達定點監測,分析主動激光雷達技術對偷排偷放的監測能力。該水泥廠采用布袋除塵方式,除塵率在99%以上。在水泥生產時,原料經過皮帶機的輸送進入生料磨,同時增濕塔的煙氣噴入生料磨,幫助生料進行粉磨。生料粉磨出來的物料,即生料,進入高效旋風分離器,進行分離,粉塵進入窯尾收塵器,生料落下,經過皮帶機或螺旋輸送機,送入生料均化庫。

圖1 實驗地點和觀測方向示意圖
在河北省環境監測中心站的監控下,工廠在煙囪下方安裝了在線監控設備,數據實時上傳至河北省環境監測中心站,并定期利用河北省環境監測中心站的標準儀器對工廠的儀器設備進行對比標定。在線監控設備工作原理是將煙塵采樣管由采樣孔放入煙道,應用皮托管按等速采樣要求抽取一定量的含塵氣體,根據濾筒捕集的煙塵重量以及抽取的氣體體積,計算顆粒物的排放濃度及排放總量。測試儀同時應用定電位電解法定性或定量測定O2、SO2、CO、NO、NO2、H2S、CO2等氣體的含量,同時提供煙氣溫度、含濕量等參數。該儀器可用于各種鍋爐、爐窯煙塵(氣)的排放濃度或總量測定。實驗中自動煙塵(氣)測試儀用于探測煙囪口處排放顆粒物的濃度,為激光雷達探測信號值的比照提供參考數據。
1.3 實驗方案
將水泥廠的3號窯尾煙囪作為觀測對象,地表寬廣平整的花壇作為觀測點,該觀測點距觀測對象約750 m。從2015年6月9日17∶10—10日04∶00對3號窯尾煙囪進行觀測,通過觀察實時數據接收界面,直觀與煙塵排放濃度變化對比。然后設置一個激光雷達信號指數因子,與在線儀器獲取的煙塵排放濃度統計分析,驗證兩者可對比性。
實驗從2015年6月9日17∶10開始。首先進行了約3 h的觀測,用以確定污染源排放的穩定性及Lidar信號的可對比性。其中,17∶10—19∶10風速較小、大氣穩定,認為是穩定排污過程;然后拔除除塵袋,增加排污強度(表2),并觀察Lidar信號的變化;23∶30結束封閉氣室,排污強度再次降低。
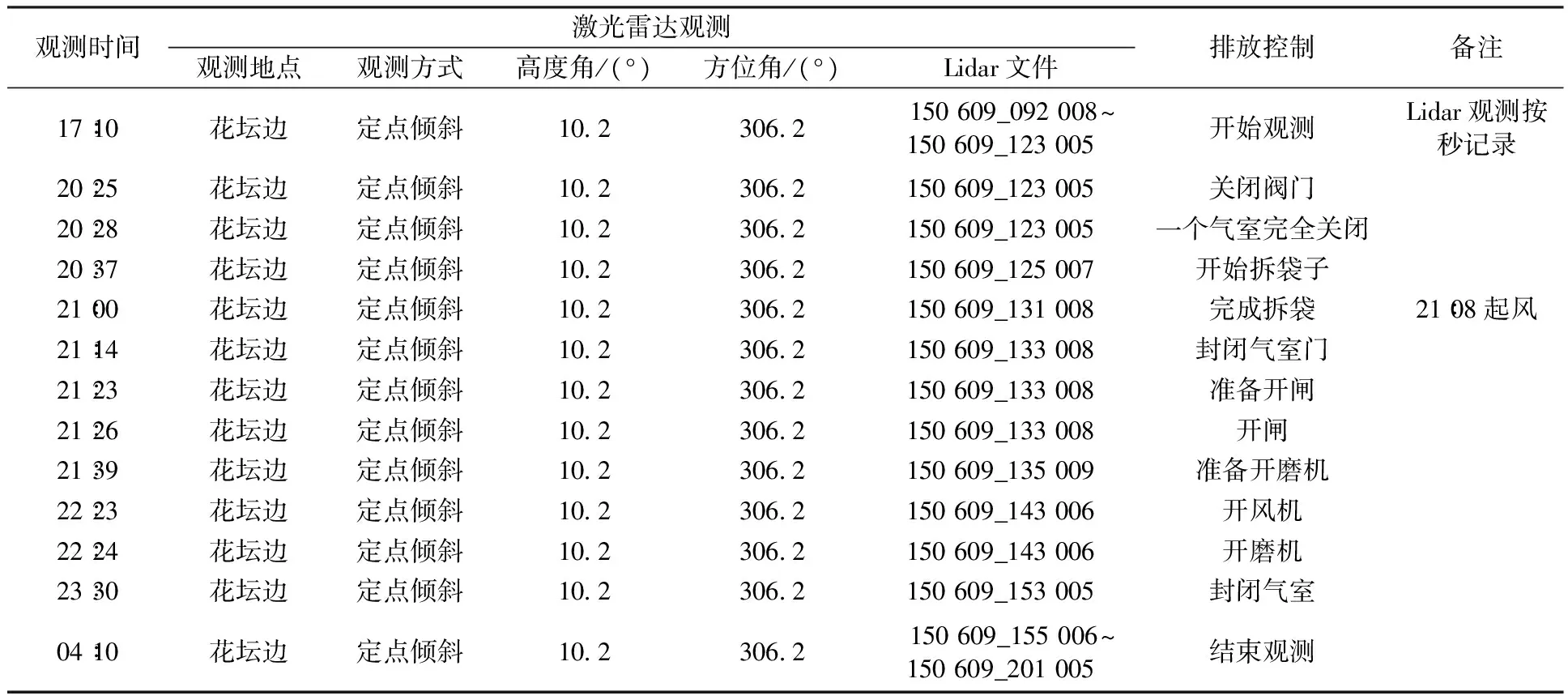
表2 激光雷達粉塵點污染源監測實驗過程
2 數據處理
2.1 激光雷達探測原理
激光雷達探測大氣的基本原理即激光與大氣相互作用的機制。激光器產生的激光束經發射到大氣中,在大氣中遇到空氣分子、氣溶膠等成分便會發生散射、吸收等作用。散射中的小部分能量(后向散射光)落入接收望遠鏡視場被接收。其基本原理可以用公式來表示:
(1)
式中:P(Z)為接收的信號,Z為信號到激光雷達的距離,C為激光雷達系統常數,E為激光脈沖能量,β為后向散射系數,T2為雙向透過率。BG、AP、DTC、O(Z)分別表示背景噪聲、殘余脈沖、探測器延時校正和重疊因子校正。
2.2 激光雷達確定污染源位置
由于窯尾煙囪距離觀測點較遠,無法直接用肉眼觀察激光光斑位置,為準確定位污染源位置,實驗采用十字掃描方式確定,并通過激光測距儀進行驗證。
具體實施方法是將激光雷達大體指向窯尾煙囪所在方向,固定高度角,在觀測目標左右約10°范圍內進行水平掃描,觀察激光雷達信號,當信號由平滑變為有明顯峰值,隨著掃描信號峰值消失時,即認為該角度為煙羽所在方位角。然后固定方位角,從較低的高度開始進行垂直掃描,起初激光光斑打在煙囪柱體上,信號顯示無法穿透,通過逐漸上調高度角,當激光雷達信號突然出現穿透時,即為煙囪口所在位置。通過激光雷達儀,測量觀測點到3號窯尾煙囪的距離,與激光雷達信號峰值位置對比,兩者差值較小。標記高度角和方位角,即為污染源位置。圖2為不同時間激光雷達接收的回波信號(P),可以看出回波信號隨高度變化,在約750 m處存在一個高峰值,即為污染源位置。
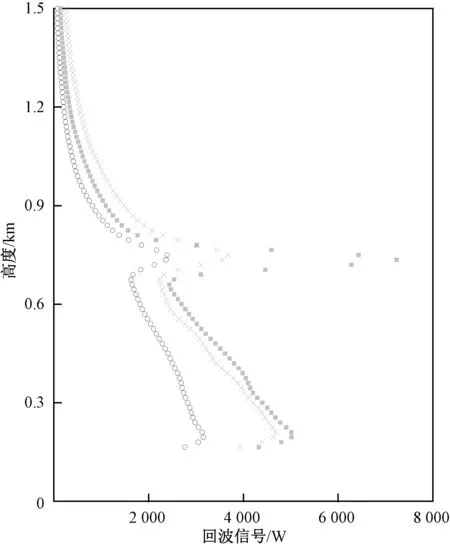
圖2 不同時間的激光雷達回波信號變化Fig.2 The signal changes ofLidar at different time
2.3 激光雷達信號校正
激光雷達探測煙塵顆粒物后得到原始數據見圖3(a),可以直觀看出污染源處(約750 m)信號的峰值。如式(1)所示,大部分參數是與距離相關的函數。而激光雷達信號測量的是每秒的光電子數和距離。在對原始數據進行幾個相應的校正后[10],可以獲得距離校正信號,主要包括探測器延時校正、背景噪聲校正、殘余脈沖校正、幾何因子校正、低通濾波、距離校正等。其中,探測器延時校正是為了消除因光子計數時探測器飽和而造成的光子計數損失;背景噪聲校正是為了消除因大氣背景光進入到探測器而產生的噪聲;殘余脈沖校正是為了消除儀器內部因發射激光束帶來的殘余脈沖所造成的影響;幾何因子校正是為了校正因收發系統非共軸或者收發系統共軸系統自身阻擋造成的距離較近光路上回波信號的未完全接收;低通濾波是為了濾除高頻噪聲,提高信噪比;距離校正則是為了校正后向散射信號隨距離平方衰減的問題。用公式表達為
S(Z)=C×E×β(Z)×T2
(2)

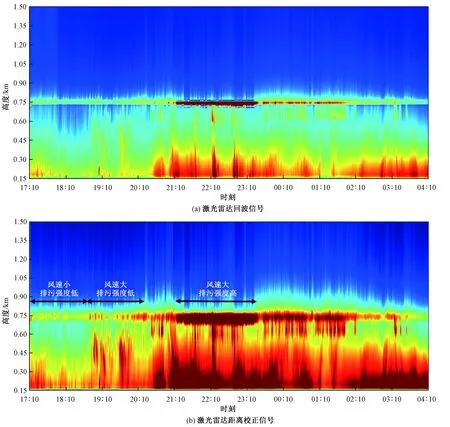
圖3 2015年6月9日17∶10—10日04∶10激光雷達觀測結果
圖3(b)為2015年6月9日17∶10—10日04∶10 激光雷達距離校正圖像,與圖3(a)對比,可以看出隨排污強度的增加,污染源處信號強度明顯增大。圖3(b)在19∶00以后,由于風速增大,近地面信號強度開始增加并且有一些波動。在約600 m高度處,有不時出現的小高峰值,是因為風向不穩定,風速大,使3號窯尾煙囪附近低矮排污的不固定方向污染傳輸。另外,由于風速較大,750 m處有部分污染在觀測路徑上擴散。
2.4 激光雷達點污染監測指數因子計算
由于激光雷達接收信號是隨距離衰減的,污染源處激光雷達信號強弱除了受粉塵排放強度的影響,同時受大氣環境的影響。為了消除大氣環境的影響,設置一個激光雷達點污染源監測指數因子(也稱Lidar指數因子,C)來表示污染程度。
設距離r1處的激光雷達信號為
(3)
設距離r2處的激光雷達信號為
(4)
將大氣分為大氣分子(m)和氣溶膠(a)兩部分[11],即β=βm+βa,σ=σa+σm,則C可表示為
C=
(5)
式中:Sa和Sm分別表示氣溶膠雷達比和大氣分子雷達比,為氣溶膠和大氣分子的消光系數與后向散射系數的比值,則式(5)可以表示為
C=
(6)
式中:大氣分子廓線采用美國標準大氣模型,即認為βm、Sm為已知。假設大氣穩定,認為在不受污染源影響區域的βa(Z2)變化較小,可忽略。則可以看出,C與βa(Z1)為正相關,即若排污強度增強,C增大。從C的定義可以看出,對比高度(Z2)應選擇不受污染源影響,相對穩定的區域,研究通過選用了不同距離作為r2進行對比,認為選用污染源后方的信號能獲得更好的結果,這主要是因為污染源前方受地面污染擴散影響大(圖3),另外實驗時主要為西北風,污染源排出的粉塵更易向污染源前方傳輸,因此研究選用800 m為對比距離。
3 觀測結果及分析
將2015年6月9日17∶00—10日04∶00的每分鐘數據進行統一分析,圖4為在線儀器測得煙塵排放濃度與Lidar指數因子的時間序列圖。

圖4 2015年6月9日17∶00—10日04∶00(北京時間)在線儀器測得煙塵排放濃度與Lidar指數因子的時間序列
由圖4可以看出,污染源排放強度可直觀反映在激光雷達監測數據上,但是由于兩者觀測位置不同,Lidar指數因子比在線儀器測量的煙塵排放濃度具有更大的不穩定性。從煙塵排放濃度可以看出在21∶00—21∶26,完成拆袋、沒有開閘時,煙塵排放濃度約增加1倍(20~40 mg/m3),Lidar指數因子也同時增加,增量約為30%(1.8~2.9)。開閘后,煙塵排放濃度從約40 mg/m3瞬間升到120 mg/m3(約3倍),但Lidar指數因子則逐漸從2.9升到6(增加約1倍)。對圖4中煙塵排放濃度和Lidar指數因子進行統計,見圖5。
由圖5可以看出兩者的頻數分布基本一致。煙塵排放濃度主要集中在10~30 mg/m3,Lidar指數因子主要集中在1.5~2.0。排放濃度較強時,煙塵排放濃度主要集中在110~290 mg/m3,Lidar指數因子的頻數分布也在3.75~6.25區間有峰值存在。
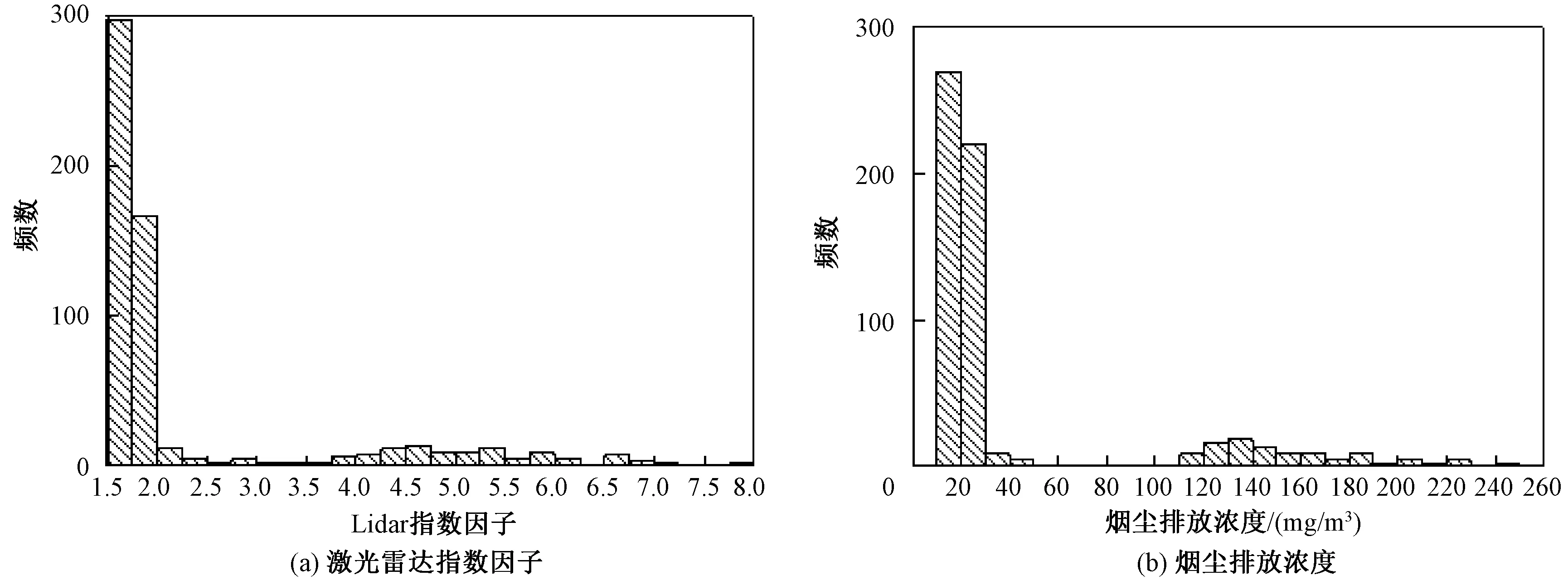
圖5 頻數分布直方圖
根據環境保護部《水泥工業大氣污染物排放標準》,水泥窯等熱力設備的排放標準為30 mg/m3[12],而分析煙塵排放濃度的穩定排放階段,煙塵排放均值約為18 mg/m3,圖6分別展示了煙塵排放濃度、Lidar指數因子與穩定排放階段均值的差值,其數值的大小可以表示變化幅度的大小。
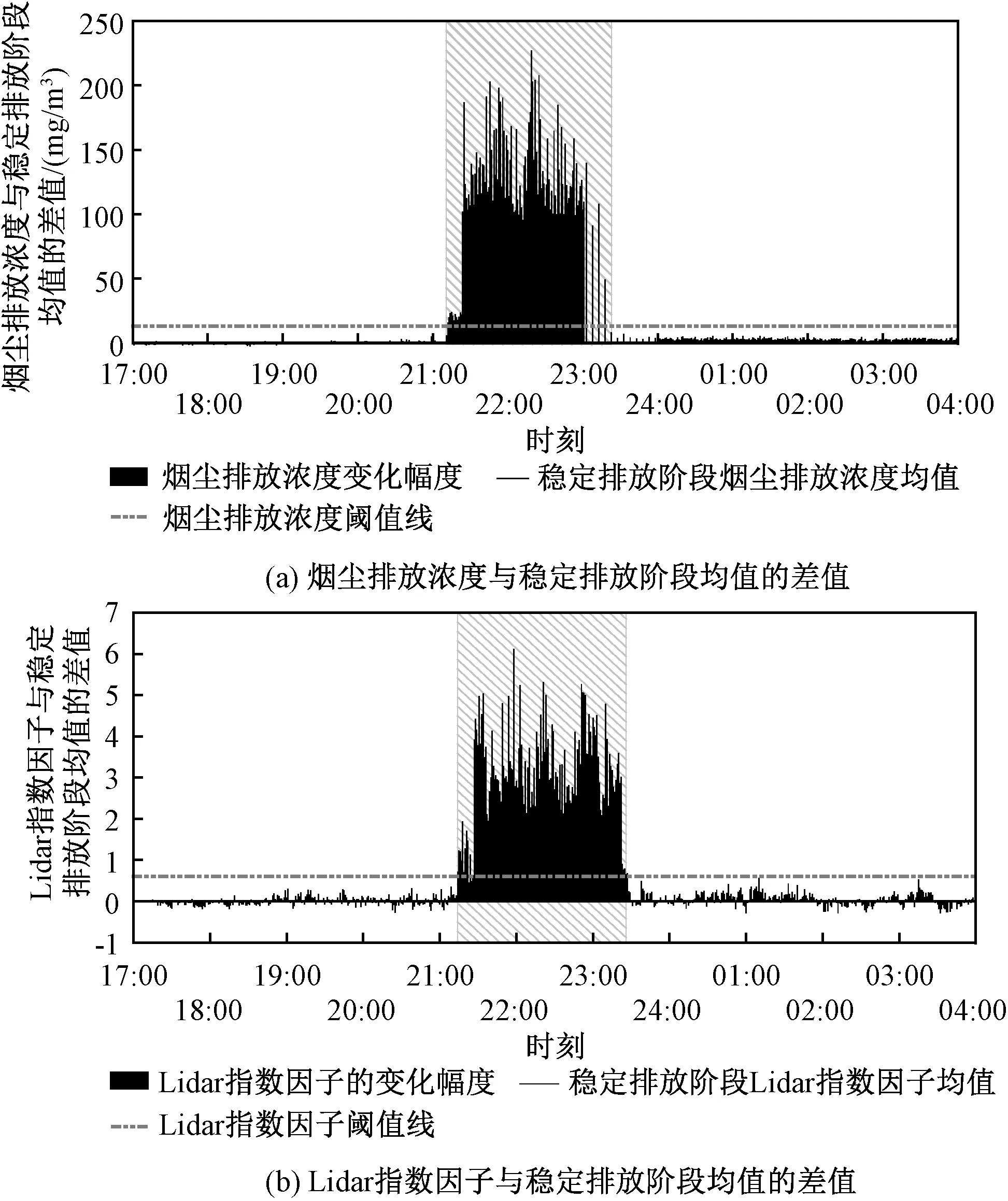
圖6 2015年6月9日17∶00—10日04∶00(北京時間)在線觀測與激光雷達觀測對比
從圖6中可以看出Lidar指數因子的變化幅度明顯大于煙塵排放濃度,這主要是因為兩者監測的位置不同。圖6(a)為煙塵排放濃度與穩定排放階段均值的差值,虛線為+12 mg/m3,即表示超標排放。可以看出,在穩定排放階段煙塵排放濃度變化較小,一般不會超過2 mg/m3。 圖6(b)的Lidar指數因子也以穩定排放階段的均值(1.7)為基準,虛線為0.6,對應表示超標排放。可以看出,雖然Lidar指數因子穩定性較煙塵排放濃度差,但是在穩定排放階段,Lidar指數因子變化一般也不會超過0.2。即使在實驗后期,煙塵排放濃度整體有所增加(約21 mg/m3),Lidar指數因子變化一般也不會超過0.6。以2個圖中的虛線作為排放閾值線(即煙塵排放濃度閾值為30 mg/m3,Lidar指數因子閾值為2.3),只有4條結果對不一致,均出現在排放濃度增加的開始和停止時間段,這主要是因為在線設備在煙囪底部,是實時、不受環境影響的記錄,而激光雷達是對煙囪口的記錄,煙羽在煙囪內部進行了混合、擴散、沉降,再從煙囪向外排放時濃度還不穩定,并且受外界風向、風速等氣象因素的影響。因此,在穩定排污的情況下,可以將研究中波段組合的Lidar指數因子的限值設為2.3,進行粉塵污染源排污監測。
4 結論
1)經過距離校正后,激光雷達信號可以直觀反映煙塵排放濃度,信號隨煙塵排放強度的增加而增大,可用于點污染源排放監測。
2)綜合考慮風向、近地面污染擴散影響后,選擇污染源上風向與污染源處信號組成激光雷達點源監測指數因子,結果顯示該指數因子與煙塵排放濃度具有很好的一致性,校正決定系數可達0.94。
3)針對水泥廠類型粉塵排污,對應水泥窯等熱力設備30 mg/m3的排放標準,將激光雷達點源監測指數因子的限值設為2.3,可達到99%的監測一致性。
當然,由于激光雷達監測的是煙囪出口處濃度,與在線儀器在煙道內監測位置不盡相同,因此額外受到煙囪口處大氣環境的干擾。盡管研究采用激光雷達點源監測指數因子方法可有效降低這種干擾,但局部信號相關性仍然較差。然而在實際監測中,激光雷達點源監測指數因子方法完全可以滿足對粉塵點污染源超排超放監測的需求。
參考文獻(Reference):
[1] BERT, STEPHEN T H. Air Pollution and Health [J]. The Lancet,2002,360(9 341):1 233-1 242.
[2] SMITH K R,WOODWARD A,CAMPBELL-LENDRUM D, et al. Human Health: Impacts, Adaptation, and Co-Venefits. In: Climate Change 2014: Impacts, Adaptation, and Vulnerability. Part A: Global and Sectoral Aspects. Contribution of Working Group II to the Fifth Assessment Report of the Intergovernmental Panel on Climate Change [R]. United Kingdom and New York: Cambridge University Press,2014:709-754.
[3] 李成才,毛節泰,劉啟漢. 利用MODIS 資料遙感香港地區高分辨率氣溶膠光學厚度[J]. 中國科學D輯:地球科學,2005,29(3):335-342.
LI Chengcai, MAO Jietai, Alexis Kai Hon Lau. Remote Sensing High Spatial Resolution Aerosol Optical Depth with MODIS Data over Hong Kong[J]. Chinese Journal of Atmospheric Science,2005,29(3):335-342.
[4] KAUFMAN Y J, TANRé D, REMER L A, et al. Operational Remote Sensing of Tropospheric Aerosol over Land from EOS Moderate Resolution Imaging Spectroradiometer [J]. J. Geophys Res,1997,102(D14):17 051-17 067.
[5] 趙英時. 遙感應用分析原理與方法[M].北京:科學出版社,2003:67-103.
[6] KIMM H, KIM S W, YOON S C, et al. Comparison of Aerosol Optical Depth Between CALIOP and MODIS-Aqua for CALIOP Aerosol Subtypes over the Ocean[J]. J. Geophys Res Atmos,2013,118(13):241-252.
[7] PAPPALARDO G, AMODEO A, AMORUSO S, et al. One Year of Tropospheric Lidar Measurements of Aerosol Extinction and Backscatter [J]. Atmospheric Chemistry & Physics,2003,46(2):401-413.
[8] HHUANG J, HHUANG Z, BI J, et al. Micro-Pulse Lidar Measurement of Aerosol Vertival Structure over the Loess Plateau[J]. Atmospheric and Oceanic Science Letters,2008,1:8-11.
[9] CHEN X, LU Y, ZHANG W C, et al. Comparison Between Dust and Haze Aerosol Properties of the 2015 Spring in Beijing Using Ground-Based Sun Photometer and Lidar.[C]∥ Optical and Optoelectronic Sensing and Imaging Technology.Beijing:AOPC,2015.
[10] RAMASWAMY T. Micropulse Lidar Observations of Free Tropospheric Aerosols over the Atmospheric Radiation Measurement Site at Barrow, Alaska [D].Alaska:University of Alaska Fairbanks,2006:14-23.
[11] FERNALD F G, HERMAN B M, REAGAN J A, et al. Determination of Aerosol Height Distributions by Lidar[J]. Journal of Applied Meteorology,1972,11:482-489.
[12] 環境保護部科技標準司.水泥工業大氣污染物排放標準:GB 4915—2013[S].北京:中國環境出版社, 2013.
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
媽媽寶寶(2019年10期)2019-10-26 02:45:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
鐵道通信信號(2018年11期)2019-01-19 01:15:08
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(2018年2期)2018-04-18 12:18:10
鐵道通信信號(2016年11期)2016-06-01 12:11:32
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
中國病理生理雜志(2015年8期)2015-12-21 12:38:06