車載飛輪電池的振動控制策略研究
2018-05-07 12:34:29,,,
機械與電子 2018年4期
,,,
(南京航空航天大學機電學院,江蘇 南京 210016)
0 引言
車載飛輪電池是安裝于車身上,為汽車提供動力的一種裝置。在儲能一定的情況下,其質量比超級電容器更輕、體積更小,更加有利于車載布置及安裝[1-2]。
車載飛輪電池共有3種工作狀態:充電狀態、放電狀態和保持狀態。在充電狀態時,電動機驅動飛輪轉子高速旋轉,轉子轉速逐漸升高至額定轉速,將電能儲存為機械能;在放電狀態時,發電機將存儲的機械能轉化為電能驅動汽車工作,飛輪轉子轉速逐漸降低;在保持狀態時,飛輪轉子在磁懸浮軸承支承下保持高速穩定旋轉,轉速基本保持不變。
為增大車載飛輪電池的比能量和比功率,提高儲能效率,飛輪轉子需要具有較高的極限轉速,因此,車載飛輪電池選用無接觸、無磨損、無需潤滑和易于高速化的磁懸浮軸承為飛輪轉子提供支撐。
磁懸浮軸承的位移剛度系數為負值,具有本質不穩定性,再加上磁軸承非線性的力-位移和力-電流特性,以及鐵芯材料磁飽和與磁滯等因素,使磁軸承系統具有非線性和參數不確定性,因此,需對磁軸承實施主動控制[3]。目前的工業應用中,磁軸承控制器大多是傳統PID控制。但對于車載飛輪電池而言,高轉速和過臨界轉速要求系統具有高穩定性和可靠性,汽車的轉向、啟動/剎車、車身俯仰帶來的附加載荷對系統的動態性能提出更高要求,傳統PID控制器顯然無法達到理想的控制效果。磁軸承控制策略對系統的動態性能和穩態精度均有著重要影響,國內外許多學者對磁軸承的控制策略進行了深入的研究。DeSimdt等人采用魯棒自適應控制策略,保證旋翼直升機傳動系統的復合材料轉子超臨界轉速穩定運行[4]。Murata等將PID控制與LQ(linear quadratic)控制器相結合,使轉子平穩越過兩階臨界轉速,并有效抑制了轉子的振動[5]。蘇義鑫等提出一種基于BP神經網絡的自適應PID控制器,該控制器的輸出是P,I,D信號的非線性組合,能夠補償磁軸承系統的非線性,并仿真驗證了該控制器的有效性[6]。謝振宇等提出了基于轉速的變參數控制,分析了不同控制參數對系統懸浮和旋轉狀態的影響,并完成了不同轉速區段變PID參數的軸承-轉子系統高速旋轉實驗[7]。
單神經元具有自學習和自適應能力,由其構成的單神經元自適應PID控制器結構簡單,能適應環境的變化且易于應用[8]。在此,采用單神經元自適應PID控制策略,根據磁軸承的運行狀況,通過加權系數自適應地對PID各控制參數進行調整,以保證系統具有較好的動態性能。
1 車載飛輪電池試驗系統
1.1 機械裝置
車載飛輪電池結構如圖1所示。飛輪及轉子本體輪轂選用鋁合金材料,其密度小、強度高,是理想的輪轂材料。飛輪用碳纖維和環氧樹脂經濕法纏繞成型,相比于金屬材料,復合材料具有更高的抗拉強度和極限轉速,可極大地提高儲能密度,且飛輪破壞后復合材料飛輪帶來的危害更小。差動安裝的電渦流位移傳感器,用來檢測轉子的實時振動位移。上/下徑向磁懸浮軸承組件,為飛輪轉子徑向懸浮提供電磁力。內置高頻電機,驅動飛輪轉子高速旋轉。推力磁懸浮軸承,為飛輪轉子軸向懸浮提供電磁力。真空殼體一方面使飛輪轉子在真空內旋轉從而減少空氣磨損造成的能量損失,另一方面可起到有效的保護作用。
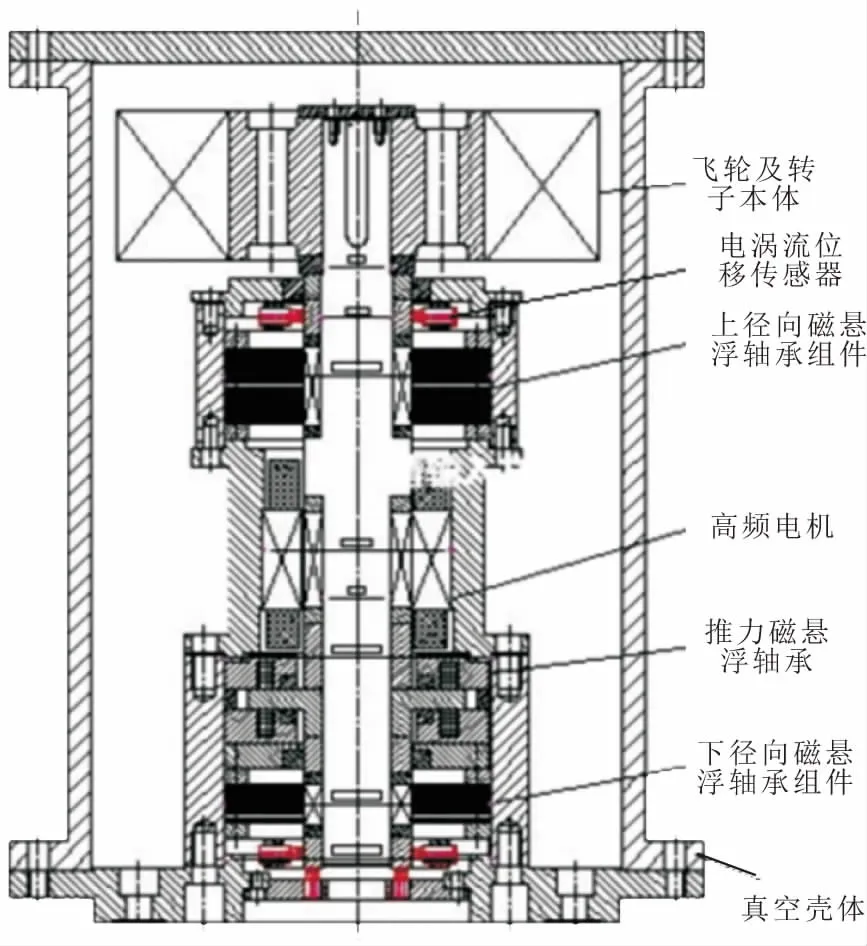
圖1 磁懸浮飛輪電池機械結構
磁懸浮飛輪轉子總長388 mm,轉子質量14.12 kg,轉子極轉動慣量0.057 kg·m2,轉子直徑轉動慣量0.23 kg·m2,徑向單邊保護氣隙0.15 mm,軸向單邊保護氣隙0.20 mm,徑向和軸向磁懸浮軸承的偏置電流均為2.0 A,飛輪電池額定工作轉速為12 000 r/min。
1.2 各環節數學模型
磁懸浮軸承-轉子系統主要包括位移傳感器、位置控制器、功率放大器、電磁鐵和轉子,工作原理如圖2所示。參考信號Xref與傳感器檢測到轉子的實際位移信號X作差,得到誤差信號e(k),經調理電路處理后,將誤差信號e(k)送給位置控制器,控制器按照相應的控制策略對誤差信號e(k)進行運算,得到輸出信號,功率放大器根據此輸出信號調整磁軸承線圈中的電流大小,從而產生合適的電磁力作用于轉子,使轉子穩定懸浮。
本文采用非接觸式電渦流傳感器監測轉子振動,為測得傳感器的通帶,對其進行動態標定。動態標定盤是一個帶有8條凹槽的圓盤,凹槽深度為0.1 mm,其結構如圖3所示。利用高速電主軸帶動動態標定盤轉動,改變電主軸轉速,可得到轉速8倍頻振動成份的幅頻曲線,如圖4所示。該曲線即為電渦流傳感器的動態特性曲線。

圖2 磁軸承系統工作原理
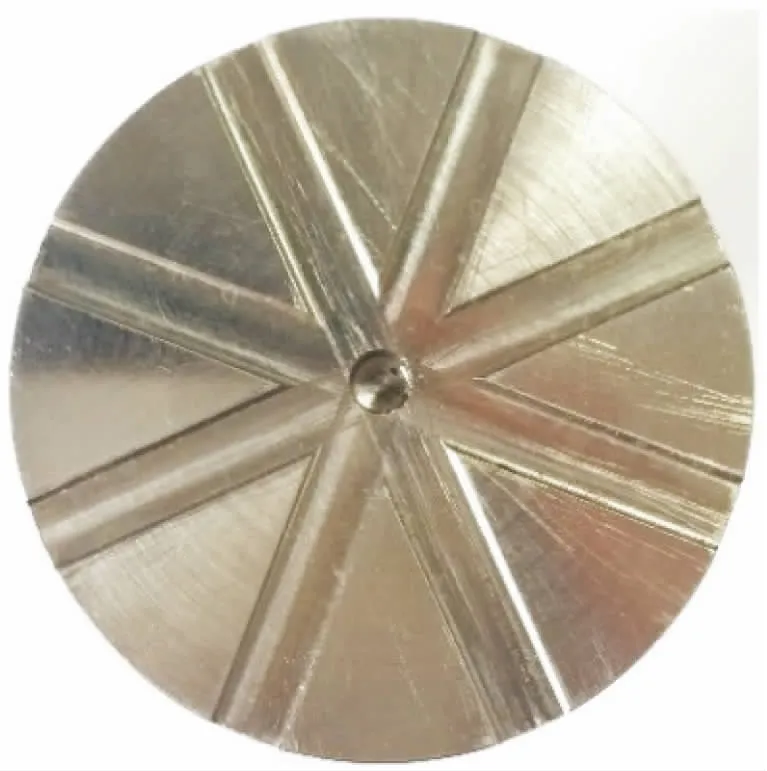
圖3 動態標定盤

圖4 傳感器幅頻曲線
由圖4可知,傳感器通帶約為3.2 kHz,則傳感器對應時間常數為:
(1)
在保護軸承范圍內,轉子最大振動幅值為0.3 mm,對應二次調理電路輸出為0~5 V,傳感器的放大系數為:
As=16 667 V/m
(2)
位移傳感器的傳遞函數可用一階慣性環節來表示,由此可得到傳感器環節的傳遞函數:
(3)
功率放大器和電磁鐵共同構成系統的執行機構。在功率放大器的控制信號輸入點用信號發生器加入峰峰值為4 V正弦波,模擬轉子振動的同頻成分,以電流響應為輸出,對各頻率的輸入輸出進行計算,可以得到幅頻特性曲線,如圖5所示。
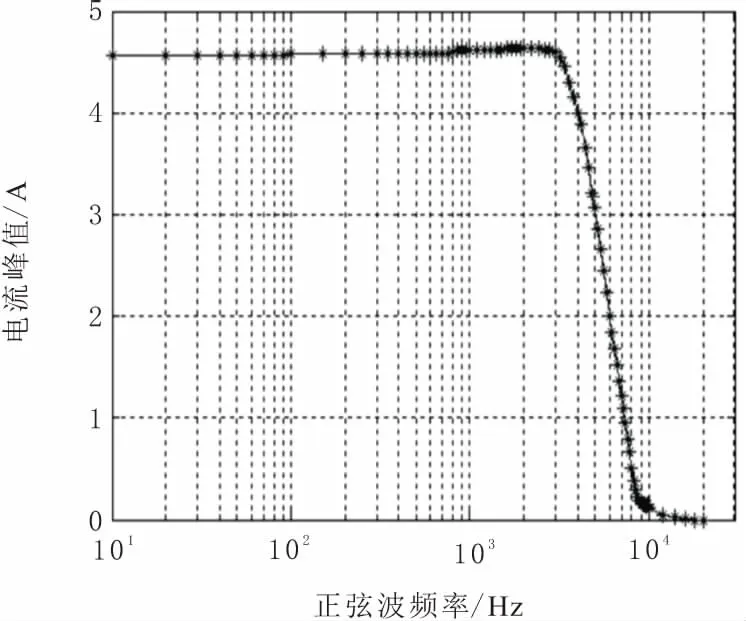
圖5 功率放大器幅頻特性曲線
由圖5可知,功率放大器的帶寬約為5 kHz,對應功放環節對應的時間常數為:
(4)
磁軸承線圈中的電流為0~4 A,控制器輸出信號的范圍是-5~+5 V,功率放大器放大系數為:
Aa=0.4 A/V
(5)
功率放大器的傳遞函數可用一階慣性環節來表示,由此可得到功放環節的傳遞函數:
(6)
采用差動勵磁方式工作的一對電磁鐵,一個磁極以偏置電流i0與控制電流ix之和(i0+ix)勵磁,另一個磁極以二者之差(i0-ix)勵磁。通過改變控制電流,可以改變2個電磁鐵產生的吸引力大小,使轉子穩定懸浮。
忽略各自由度之間的耦合及陀螺效應的影響,差動勵磁的磁軸承合力為:
(7)
F為電磁力合力,方向與x一致;x0為平衡位置處的氣隙;x為轉子偏離平衡位置的位移;k=μ0A0N2/4,μ0為真空中的磁導率,A0為電磁鐵磁極面積,N為線圈匝數。將式(7)在x=0和ix=0附近作泰勒展開并略去高階無窮小量,得到電磁力線性化關系式:
F=kxx+kiix
(8)

由牛頓定律,轉子的受力:
(9)
對式(9)進行拉普拉斯變換,結合磁軸承具體參數,可得磁軸承在一個自由度的傳遞函數為:
(10)
此時整個閉環系統的傳遞函數為:
(11)
Gc(s)為控制器環節的傳遞函數。
2 單神經元自適應PID控制
針對車載飛輪電池高轉速、過臨界和復雜工況帶來的附加載荷,采用單神經元自適應PID控制策略,以減小系統振動和滿足動態性能的要求。
2.1 神經元學習規則
加權系數的調整按照有監督的Hebb學習規則實現,以Oi表示神經元i的激活值,Oj表示神經元j的激活值,di為期望輸出, 則從神經元i到神經元j的連接權值系數wij可表示為:
Δwij(k)=ηOi(k)Oj(k)[di(k)-Oi(k)]
(12)
在教師信號di(k)-Oi(k)的引導下, 單神經元控制器不斷對環境信息進行相關學習和自組織, 使神經元之間的連接強度發生改變, 從而使加權系數自適應改變[9]。
2.2 單神經元自適應PID控制
神經元是以大腦生理研究成果為基礎,通過模擬大腦的某些機理對輸入信息做狀態響應而進行信息處理。 神經元具有自學習自組織能力,能根據環境變化調整權值;也具有很強的信息綜合能力,能同時處理大量的輸入信息。利用單神經元的上述特性,將單神經元和PID控制結合起來,利用單神經元的自學習能力,對加權系數進行調整,使得控制器最終輸出的PID參數可根據運行狀況自適應的改變,構成磁軸承的單神經元自適應PID控制器[10-11]。控制器原理如圖6所示。

圖6 單神經元自適應PID原理
x1,x2,x3是轉換器輸出的神經元學習控制所需狀態量;w1,w2,w3分別是PID控制中比例、積分和微分項的加權系數;u(k)為單神經元PID控制器的輸出信號,K為神經元的比例系數。
轉換器3個節點的輸出可表示為:
(13)
由此,可得到基于有監督的Hebb學習規則的單神經元自適應PID控制算法為:
(14)
基于有監督的Hebb學習規則的單神經元自適應PID的加權系數學習算法為:
(15)
nP,nI,nD分別為比例、積分、微分的學習速率;z(k)為誤差信號,z(k)=e(k)。當誤差信號z(k)發生變化時,w1,w2,w3會產生自適應變化,單神經元PID的自適應性正是體現于此。
3 系統仿真研究
根據得到的系統各環節數學模型,對單自由度磁軸承-轉子系統進行相關控制策略的仿真研究,控制參數的選取由實際調試時確定。為了讓仿真結果更接近實際系統,仿真時各環節均不作簡化。
分別采用不完全微分PID和單神經元自適應PID對磁軸承-轉子系統的起浮特性及抗干擾性能進行仿真研究,以比較2種不同控制策略的優劣。在普通PID算法中加入慣性環節(低通濾波器),以削弱高頻噪聲,構成不完全微分PID控制算法。采用表1的控制參數,在Simulink中利用其基本的模塊,搭建系統的不完全微分PID控制框圖。

表1 不完全微分PID控制參數
不完全微分PID仿真結果如圖7所示,由圖7可知,轉子起浮時,系統調節時間約為0.15 s,超調量為10%。在t=0.2 s時,加入幅值為0.1的脈沖激勵信號,此時系統的調節時間為0.03 s,超調量為32%。
根據系統各環節數學模型及單神經元自適應PID相關的控制算法和學習算法,編寫MATLAB程序,完成系統單自由度單神經元自適應PID控制策略的仿真研究。啟動時,初始PID參數同表1,比例、積分、微分項的學習速率分別為nP=10,nI=1,nD=10,比例、積分、微分項的初始加權系數分別為w1=0.33,w2=0.33,w3=0.33,神經元的比例系數K=0.02。圖8、圖9分別為單神經元自適應PID控制的起浮曲線和加權系數變化曲線。

圖7 不完全微分PID控制的起浮曲線
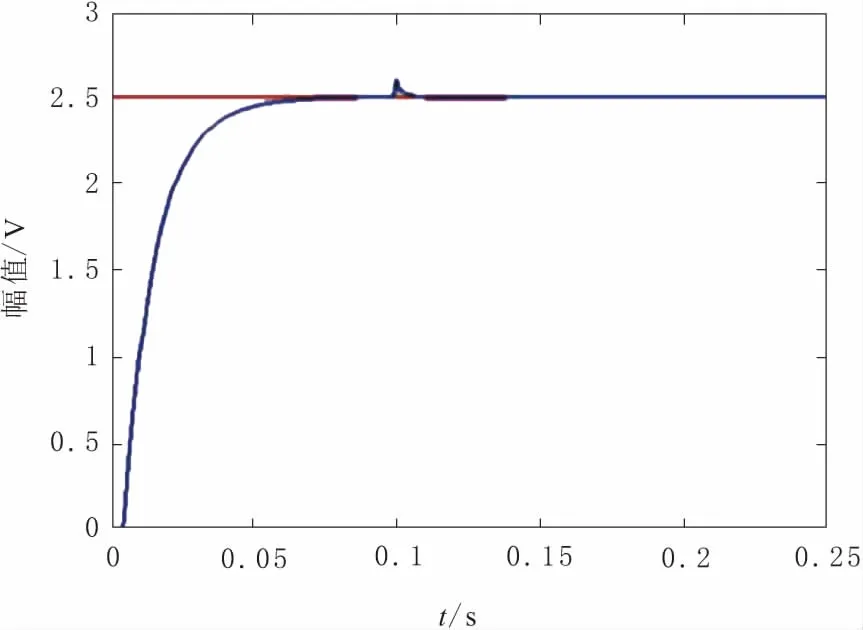
圖8 單神經元PID控制的起浮曲線

圖9 單神經元PID加權系數變化曲線
由圖8可知,轉子起浮時,系統調節時間為0.08 s,無超調量。在t=0.1 s時,加入幅值為0.1的脈沖激勵信號,此時系統的調節時間為0.02 s,超調量為8%。而由圖9可知,在t=0.1 s加入幅值為0.1的脈沖激勵時,加權系數沒有變化,即說明參數穩定性好。
在其他仿真條件保持不變的情況下,僅改變脈沖激勵信號的幅值。在t=0.1 s時,加入幅值為1.0的脈沖激勵信號,由圖10可知,系統的調節時間為0.05 s,超調量為40%。由圖11可知,在較大干擾情況下,加權系數變化也很小,說明參數穩定性好。
仿真結果表明,單神經元自適應PID控制策略與不完全微分控制策略相比,系統無超調量,調節時間短,魯棒性好。同時,單神經元自適應PID在有擾動存在的情況下,參數穩定性好。

圖10 單神經元PID控制的起浮曲線

圖11 單神經元PID加權系數變化曲線
4 系統高速旋轉試驗
車載飛輪電池試驗系統包括飛輪電池本體、磁軸承電源箱/電控箱、仿真器和PC機,其中,數字控制器和PC機之間通過仿真器連接通信。磁懸浮儲能飛輪試驗系統,如圖12所示。

圖12 試驗系統實物
分別選取最優控制參數將飛輪轉子穩定懸浮。不完全微分PID控制參數如表2所示,單神經元自適應PID初始KP,KI,KD,Tf同表2,比例、積分和微分項的學習速率和初始加權系數,如表3所示。

表2 高速旋轉試驗不完全微分PID控制參數

表3 高速旋轉試驗單神經元自適應PID控制參數
高速變頻電機驅動轉子加速至12 000 r/min,借助本實驗室開發的數據采集系統,采集2種控制策略下轉子各轉速的振動位移,利用Origin繪制出轉子的同頻振幅曲線,如圖13所示。

圖13 單神經元自適應PID與PID同頻振幅對比
由圖13可知,飛輪轉子在3 000 r/min左右存在臨界轉速,而在單神經元自適應PID控制策略下,飛輪轉子振幅為0.3 μm,遠低于不完全微分PID的3.56 μm,控制精度高。在7 400 r/min前,單神經元自適應PID控制策略下的振幅小于不完全微分PID控制策略,且在全轉速范圍內,單神經元自適應PID振幅變化平坦,均不超過1.7 μm。
5 結束語
通過對單神經元自適應PID控制策略的理論研究和試驗分析,可得如下結論:
a.單神經元自適應PID控制策略能夠自動調整控制參數,在全轉速范圍內振幅變化平坦,動態性能良好。
b.單神經元自適應PID控制策略下,轉子最大振動幅值僅為1.66 μm,控制精度高。
c.與不完全微分PID相比,單神經元自適應PID能夠改善系統的綜合性能,使轉子在臨界轉速附近能夠安全穩定運行。
參考文獻:
[1] 戴興建,鄧占峰,劉剛,等.大容量先進飛輪儲能電源技術發展狀況[J].電工技術學報,2011,26(7):133-140.
[2] Hadjipaschalis I,Poullikkas A,Efthimiou V.Overview of current and future energy storage technologies for electric power application[J].Renewable and Sustainable Energy Reviews,2009,13(6/7):1513-1522.
[3] Schweiter G, Maslen E H. Magnetic Bearings:theory,design,and application to rotating machinery[M]. New York:Springer,2009.
[4] Desmidt H A, Wang K W, Smith E C. Robust-adaptive magnetic bearing control of flexible matrix composite rotorcraft driveline[J].Journal of the American Helicopter Society, 2008,53(2): 115-124.
[5] Murata M,Tajima H,Watanabe T,et al.New modeling and methods for flexible rotors with magnetic bearings toward passing through critical speeds caused by elastic mode[R]. Martigny,Switzerland:The 10th International Symposium on Magnetic Bearings,2006.
[6] 蘇義鑫,龍祥,張丹紅,等.主動磁軸承的神經網絡自適應PID控制[J].華中師范大學學報(自然科學版),2004,38(3):304-307.
[7] 謝振宇,牟偉興,周紅凱,等.基于轉速的磁懸浮軸承轉子系統變參數控制[J].振動工程學報,2012,25(6):739-744.
[8] 莊華強.磁懸浮柔性轉子系統的自適應控制研究[D].南京:南京航空航天大學,2010.
[9] Lu B,Choi H,Buckner G D,et al.Linear parameter-varying techniques for a control of a magnetic bearing system[J].Control Engineering Practice,2008,16(10):1161-1172.
[10] 陶永華.新型PID控制及其應用[M].北京:機械工業出版社,2002.
[11] Wu Q H,Ni W,Zhang T.Research on Digital Control System for Three-degree-Freedom Hybrid Magnetic Bearing with Bilateral Magnetic Pole Faces[C]∥Chinese Control and Decision Conference.Xuzhou,China,2010:2893-2897.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
能源工程(2020年6期)2021-01-26 00:55:22
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
山東冶金(2019年3期)2019-07-10 00:54:04
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
消費導刊(2018年10期)2018-08-20 02:57:02
家庭影院技術(2017年9期)2017-09-26 03:41:45
通信電源技術(2016年1期)2016-04-16 04:57:26